用于车辆的踏板仿真器、踏板制动系统及操纵方法和车辆与流程
- 国知局
- 2024-08-02 17:03:47
本发明涉及一种用于车辆的踏板仿真器、一种踏板制动系统、一种用于操纵这样的踏板制动系统的方法以及一种车辆。
背景技术:
1、由于车辆市场的增加的电气化以及排气要求提高,有必要考虑产生制动作用的新的可行性。当前的制动系统已经朝着不再基于真空、而是伺服电气地增强制动作用的方向前进。然而在此,始终还有对制动作用的纯机械影响。
2、下一个开发步骤的目的现在在于,将驾驶员的制动指令和制动作用完全解耦(所谓的“线控制动”),如在加速踏板中也已经是这种情况。为了使触觉继续保持可与传统的制动系统相比拟的,需要对力-行程特性曲线进行机械仿真。与加速踏板相比,在踏板行程与踏板力之间存在非线性关联。通常涉及在踏板行程上的累进的力上升。
3、在力-行程特性曲线的仿真中可设置大量机械构件或元件。在这种机械构件或元件发生功能故障时,驾驶员的制动指令的继续传递不再进行或仅会变差。必要时,不再能保证驾驶员的制动指令的继续传递或转化,以产生制动作用。
技术实现思路
1、本发明的任务在于,给出一种用于车辆的踏板仿真器,借助所述踏板仿真器一方面能在操纵踏板时实现好的触感并且另一方面(尤其是在故障情况下也)能实现驾驶员的制动指令的安全且可靠的继续传递,以产生制动作用。
2、前述任务通过权利要求的技术方案、尤其是通过一种根据权利要求1所述的踏板仿真器、一种根据权利要求9所述的踏板制动系统、一种根据权利要求13所述的用于操纵这样的踏板制动系统的方法以及一种根据权利要求15所述的车辆来解决。本发明的其它优点和细节由从属权利要求、说明书和附图得出。在此,结合根据本发明的踏板仿真器所描述的特征和细节当然也适用于结合根据本发明的踏板制动系统、根据本发明的方法以及根据本发明的车辆,并且相应地反之亦然,使得关于各个发明方面的公开内容始终可相互参考。
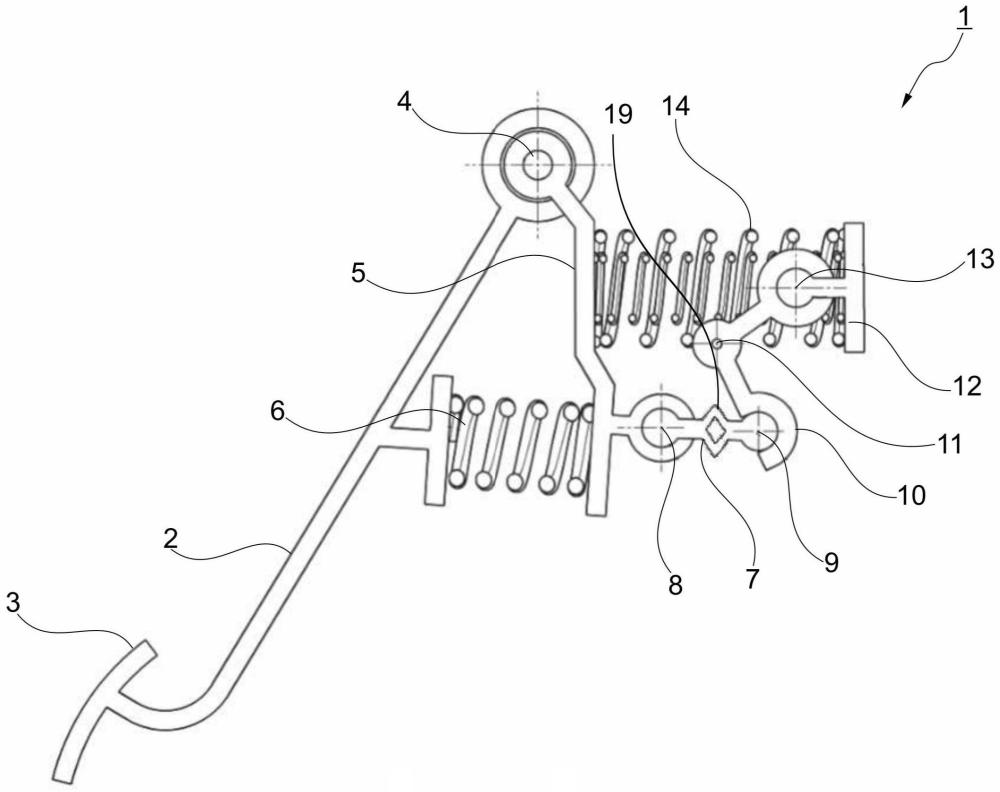
3、根据本发明的第一方面,所述任务据此通过一种用于车辆的踏板仿真器来解决,所述踏板仿真器包括:能围绕第一转动轴转动的踏板杠杆;力产生单元,所述力产生单元具有能与所述踏板杠杆机械耦联的耦联元件;和复位支架,所述复位支架以能围绕第二转动轴转动的方式支承。力产生单元设计用于借助耦联元件对踏板杠杆实施反力。在第一转动轴与第二转动轴之间的机械的作用连接能借助耦联元件来建立。在由驾驶员施加到踏板杠杆上的操纵力大于预先限定的最大操纵力的情况下,所述耦联元件是能变形的。踏板仿真器还具有用于检测在第一转动轴处的第一转动的第一转动传感器和用于检测在第二转动轴处的第二转动的第二转动传感器。
4、换句话说,可提供一种踏板仿真器,所述踏板仿真器具有耦联元件,所述耦联元件在踏板仿真器的正常运行中可用作在踏板杠杆与复位支架之间、即在所述两个转动轴之间的刚性的机械的作用连接,并且在踏板仿真器的紧急运行中可变形,使得所述机械的作用连接中断或者被中断。
5、通过这种踏板仿真器能提供机械的保险机制,尤其是用于车辆的制动系统。可能出现踏板仿真器例如由于污物、石头或任何小部件而被部分地堵塞。能通过这种踏板仿真器提供的机械的保险机制能在踏板仿真器或踏板堵塞时实现紧急运行。紧急运行或紧急运行的采取可通过设置耦联元件来实现,所述耦联元件在一定的操纵力下和/或在一定的压力下可逆地或不可逆地变形。在由驾驶员施加到踏板杠杆上的操纵力小于预先限定的最大操纵力的情况下,耦联元件能用作刚性的机械作用连接件。当耦联元件用作在第一转动轴与第二转动轴之间的刚性的机械作用连接件时,可以说踏板仿真器正常运行。由于在第一转动轴与第二转动轴之间、也就是在踏板杠杆与复位支架之间的能建立的机械的作用连接,在第一转动轴处的第一转动和在第二转动轴处的第二转动可相互关联和/或同步。第一转动优选可以是踏板杠杆的转动。第二转动优选可以是复位支架的转动。
6、在踏板仿真器或踏板堵塞时,驾驶员会能够将提高的操纵力或提高的压力施加到踏板杠杆上。这种提高的操纵力通常超过力阈值。在超过力阈值的情况下,原本刚性的耦联元件可变形。耦联元件可具有保险元件,所述保险元件可在超过力阈值的情况下断裂,使得耦联元件只有在保险元件断裂时才可弹性变形。通过耦联元件的变形(无论是可逆的还是不可逆的),可进一步实现在第一转动轴处的转动。在所述两个转动轴之间的机械的作用连接可由于耦联元件的变形而至少部分地中断,使得第一转动能独立于第二转动地进行。堵塞的元件和/或构件通常继续保持堵塞,但可采取踏板仿真器的紧急运行、即至少在第一转动轴处的第一转动。从正常运行到紧急运行的变换可借助第一转动传感器和第二转动传感器来监控或检测。
7、力阈值可表示预先限定的最大操纵力。所述预先限定的最大操纵力可通过耦联元件的弹性特性来预先限定。预先限定的最大操纵力可取决于耦联元件的材料特性和/或几何特性。因而,耦联元件可构造为,使得能预先限定确定的最大操纵力。预先限定的最大操纵力例如可取决于耦联元件的耦联杆的直径、耦联元件的材料或材料组合和/或几何结构(例如空心几何结构)。
8、预先限定的最大操纵力通常应能由人在不费大力气的情况下施加。预先限定的最大操纵力可超过在正常运行中常见的用于操纵踏板或制动踏板的力。预先限定的最大操纵力例如可处于3n至20n之间、尤其是在5n至10n之间。
9、因为在第一转动轴上布置有第一转动传感器,所以踏板仿真器还可通过第一转动运行成,使得即使在堵塞的情况下也能通过所述第一转动传感器可靠地制动。换句话说,可通过设置两个转动传感器而在正常运行中提供冗余。可采取紧急运行,在所述紧急运行中借助耦联元件在第一转动轴与第二转动轴之间提供能中断的作用连接。
10、耦联元件的变形可以是弯曲、断裂和/或压缩。
11、踏板仿真器可尤其是制动踏板仿真器。换句话说,踏板仿真器可在车辆的制动踏板中使用。
12、力产生单元可具有能围绕第一转动轴转动的中间杠杆,所述中间杠杆与耦联元件机械地耦联。在这种情况下,复位元件可与中间杠杆机械地耦联,尤其是支撑在中间杠杆上。耦联元件可布置、尤其是成型在中间杠杆上,或者作为单独的部件、例如作为耦联杆固定在中间杠杆上。
13、通过这种踏板仿真器能以有利的方式提供安全且可靠的踏板仿真器。同时,能以有利的方式模仿(如开头关于制动踏板所描述的)传统踏板的触觉。
14、根据所述踏板仿真器的一个实施方式,所述耦联元件设计成,使得耦联元件在由驾驶员施加到踏板杠杆上的操纵力大于预先限定的最大操纵力的情况下能不可逆地变形。尤其是,耦联元件的一部分在超过预先限定的最大操纵力的情况下能不可逆地变形。例如,耦联元件可具有保险元件,所述保险元件可在预先限定的条件下不可逆地变形、例如断裂。
15、根据所述踏板仿真器的一个实施方式,所述耦联元件设计成,使得耦联元件在由驾驶员施加到踏板杠杆上的操纵力大于预先限定的最大操纵力的情况下能可逆地变形。换句话说,例如当堵塞已被消除时,耦联元件又能用作刚性的耦联元件,以用于在第一转动轴与第二转动轴之间建立机械的作用连接。尤其是,耦联元件的一部分可以是能可逆地变形的。耦联元件可优选地构造为,使得耦联元件的至少一部分在超过预先限定的最大操纵力的情况下弯曲、叉开和/或缩小。
16、根据所述踏板仿真器的一个实施方式,所述力产生单元构造成,使得反力沿踏板杠杆的踏板行程的变化曲线在踏板行程-反力图中构造为非线性的变化曲线。
17、通过反力的由力产生单元产生的沿踏板杠杆的踏板行程或者换句话说沿踏板行程围绕转动轴的转动的非线性的变化曲线(这可在所述踏板行程-反力图中示出),模仿(如开头关于制动踏板所描述的)传统踏板的触感。
18、在此,踏板行程-反力图在当前情况中由两个不同的且经由复位支架相互连接的力路径形成。一方面存在位于踏板杠杆或者第一转动轴与复位元件之间的一个踏板行程-反力-路径。另一方面存在位于踏板杠杆或者第一转动轴与复位支架之间经由耦联元件的另一个踏板行程-反力-路径。所述两个踏板行程-反力-路径共同形成反力沿踏板行程的期望的非线性的变化曲线。复位元件可以是力产生单元的元件,所述元件在一端与第一转动轴机械地耦联,并且在另一端借助复位支架与耦联元件机械地耦联。
19、尤其可设置累进的变化曲线作为非线性的变化曲线。相应地,反力随着踏板行程的增加、即随着驾驶员对踏板杠杆的操纵的增加而过量增加。
20、复位元件可具有两个与踏板杠杆的机械耦联点。在一端或者说在复位元件的一个端部处,这可通过与第一转动轴的机械耦联而产生。在此,这可这样实现,即复位元件直接与踏板杠杆连接。在另一种随后要更详细阐释的在第一转动轴上具有中间杠杆的实施变型方案中,这也可通过复位元件与中间杠杆的机械连接来实现。因此,复位元件与第一转动轴的机械耦联可通过在第一转动轴上的杠杆、尤其是踏板杠杆或中间杠杆实现。
21、根据所述踏板仿真器的一个实施方式,所述耦联元件是耦联杆、尤其是能断裂的耦联杆。换句话说,耦联元件例如可构造为耦联杆或已经提到的中间杠杆的延长部。为了使这种耦联杆断裂,可设置预先限定的断裂部位或者说预定断裂部位。耦联杆例如可平行于或基本上平行于操纵力的施加轴线延伸。
22、根据所述踏板仿真器的一个实施方式,所述耦联元件是两件式的。耦联元件例如可具有保险元件。由此,例如能以有利的方式在第一转动轴与第二转动轴之间提供刚性的机械的作用连接,直至超过预先限定的最大操纵力。为此可规定,保险元件在超过力阈值的情况下断裂。
23、替代地或附加地,所述耦联元件可具有能彼此相互接合的两个部件。因此,耦联元件的例如用于预先限定最大操纵力的预先限定的弹性可通过所述两个部件的连接部位来确定。耦联元件可例如具有两个y形部件,它们能彼此镜像对称地安装,其中,所述两个y形部件可形成一个菱形。
24、由此能更精确地限定在第一转动轴与第二转动轴之间的机械的作用连接的中断的出现。因此,能进一步提高踏板仿真器的安全性和可靠性。
25、根据所述踏板仿真器的一种实施方式,所述耦联元件具有预定断裂部位。由此,能更好地预先限定最大操纵力,从而能借助耦联元件更精确地实现在第一转动轴与第二转动轴之间的机械的作用连接的(在堵塞的情况下期望的)中断。
26、根据所述踏板仿真器的一种实施方式,所述耦联元件具有主变形轴线,所述主变形轴线垂直于或基本上垂直于操纵力的施加轴线延伸。在此可尤其涉及能弹性变形的耦联元件。主变形轴线可替代地或附加地垂直于或基本上垂直于耦联元件的纵向延伸定向。耦联元件例如可具有两个镜像对称地彼此相叠地放置的y的形状。也就是说,耦联元件可包括菱形形状的部件,其中,菱形形状的部件的对角线可对应于主变形轴线。由此,在菱形形状的部件中例如可布置有保险元件。
27、由此,例如能更好地实现耦联元件的可逆的变形。
28、根据本发明的第二方面,开头提到的任务通过一种踏板制动系统来解决,所述踏板制动系统具有如之前和接下来所描述的踏板仿真器和控制单元,所述控制单元设计用于,检测在第一转动轴处的第一转动传感器的第一转动和在第二转动轴处的第二转动传感器的第二转动。控制单元设计用于基于对检测到的第一转动和检测到的第二转动的分析处理来检测所述耦联元件的变形。
29、换句话说,控制单元可检测或确定从正常运行到紧急运行的变换。因而,控制单元可设计用于,根据第一转动传感器的测量值或根据第一转动传感器和第二转动传感器的测量值来控制车辆的制动器。如果检测到耦联元件的变形,则可由此推导出,发生堵塞,因为耦联元件在堵塞的情况下可变形成,使得在第一转动轴与第二转动轴之间的机械的、优选刚性的作用连接中断。结果是,第一转动现在不再(如例如在正常运行中那样)与第二转动相关联,或者至少不再如预先限定的那样相关联。如果例如发生堵塞或者耦联元件由于操纵力提高而变形,则第二转动传感器不再能提供可靠的测量,因此,制动器现在应仅基于在第一转动轴处的测量来控制。
30、控制单元可随后借助合适的致动器根据第一转动传感器的测量值(在紧急运行中)或第一转动传感器和第二转动传感器的测量值(在正常运行中)并且因此根据驾驶员的期望来控制制动器。
31、结合根据本发明的第一方面的踏板仿真器所阐释的所有优点同样适用于根据本发明的第二方面的踏板制动系统。
32、所述踏板制动系统可以是线控制动制动系统。可设想,踏板制动系统还具有制动器或者说车辆的制动器是踏板制动系统的一部分。
33、根据所述踏板制动系统的一个实施方式,通过所述对检测到的第一转动和检测到的第二转动的分析处理,能检测第一转动与第二转动之间的额定相关性的偏差。换句话说,堵塞可例如由控制单元来检测。当耦联元件用作刚性的机械作用连接件时,第一转动和第二转动可对应于额定相关性。因此,额定相关性的偏差可以是故障、故障运行、耦联元件断裂、耦联元件变形和/或堵塞的标志。在控制单元检测到第一转动和第二转动之后,可推导出实际相关性。控制单元可据此将实际相关性与额定相关性进行比较,以便确定偏差。如果没有检测到偏差,即通常也没有变形,则控制单元既可使用第一转动又可使用第二转动或者相应的测量值来控制制动器。在这种情况下,所述两个转动传感器提供冗余。如果检测到偏差或变形,则控制单元可忽略第二转动或第二转动传感器的相应测量值,并且仅基于第一转动或第一转动传感器的相应测量值来控制制动器。
34、根据所述踏板制动系统的一个实施方式,所述控制单元还设计用于,基于耦联元件的检测到的变形和/或基于额定相关性的偏差,基于检测到的第一转动来控制或基于检测到的第一转动和检测到的第二转动来控制车辆的电子制动系统。
35、根据所述踏板制动系统的一个实施方式,所述控制单元还设计用于,基于耦联元件的检测到的不可逆的变形和/或基于额定相关性的偏差来输出警告信号。
36、所述警告信号可以是声学信号或触觉信号(例如通过振动)和/或视觉信号。
37、根据本发明的第三方面,开头提到的任务通过一种如之前和接下来所描述的用于操纵踏板制动系统的方法来解决,所述方法具有以下步骤:
38、-通过驾驶员将操纵力施加到踏板杠杆上,
39、-借助第一转动传感器检测踏板杠杆在第一转动轴处由操纵力产生的第一转动,并且借助第二转动传感器检测复位支架在第二转动轴处由操纵力经由耦联元件产生的第二转动,
40、-对检测到的第一转动和检测到的第二转动进行分析处理,
41、其中,当操纵力超过预先限定的最大操纵力时,耦联元件变形成,使得在第一转动轴与第二转动轴之间的机械的作用连接中断,并且
42、基于对检测到的第一转动和检测到的第二转动的分析处理来检测耦联元件的变形。
43、结合根据第一方面的踏板仿真器和/或结合根据第二方面的制动踏板系统所阐释的所有优点同样适用于根据第三方面的方法。
44、根据所述方法的一个实施方式,所述方法还具有以下步骤:
45、-基于耦联元件的检测到的变形和/或基于检测到的第一转动或基于检测到的第一转动和检测到的第二转动来控制车辆的制动器。
46、最后,根据本发明的第四方面,开头提到的任务通过一种车辆来解决,所述车辆具有如之前和接下来所描述的踏板制动系统或具有如之前和接下来所描述的踏板仿真器。
本文地址:https://www.jishuxx.com/zhuanli/20240718/253803.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表