一种电动汽车推力分配控制方法及装置与流程
- 国知局
- 2024-08-02 17:06:58
本技术涉及汽车控制,具体而言,涉及一种电动汽车推力分配控制方法及装置。
背景技术:
1、车辆推力分配控制系统是现代汽车动力系统的关键组成部分,该系统通过精确分配发动机产生的推力到各个车轮,以优化车辆的性能、稳定性和安全性,对车辆控制具有重要性。
2、目前,pid(比例-积分-微分)控制方法或多轮独立驱动控制方法在车辆控制中有广泛的应用。pid控制器是一种经典的反馈控制算法,通过不断调整输出信号来使被控对象的状态达到期望值。然而,pid控制器及整数阶模型无法完整表达新能源汽车电机的频域特性,会造成模型精度下降,从而影响推力分配策略的准确性,而多轮独立驱动控制方法又太依赖于传感器的数量及测量准确性,对控制器的数据传输速度、处理速度有更高的要求,为新能源汽车的设计增加大量成本。
技术实现思路
1、本技术的目的在于提供一种电动汽车推力分配控制方法、装置、电子设备及计算机可读存储介质,可以实现在低成本前提下有效提升车辆动力学模型的准确性,以及有效优化车辆控制性能的技术效果。
2、第一方面,本技术提供了一种电动汽车推力分配控制方法,包括:
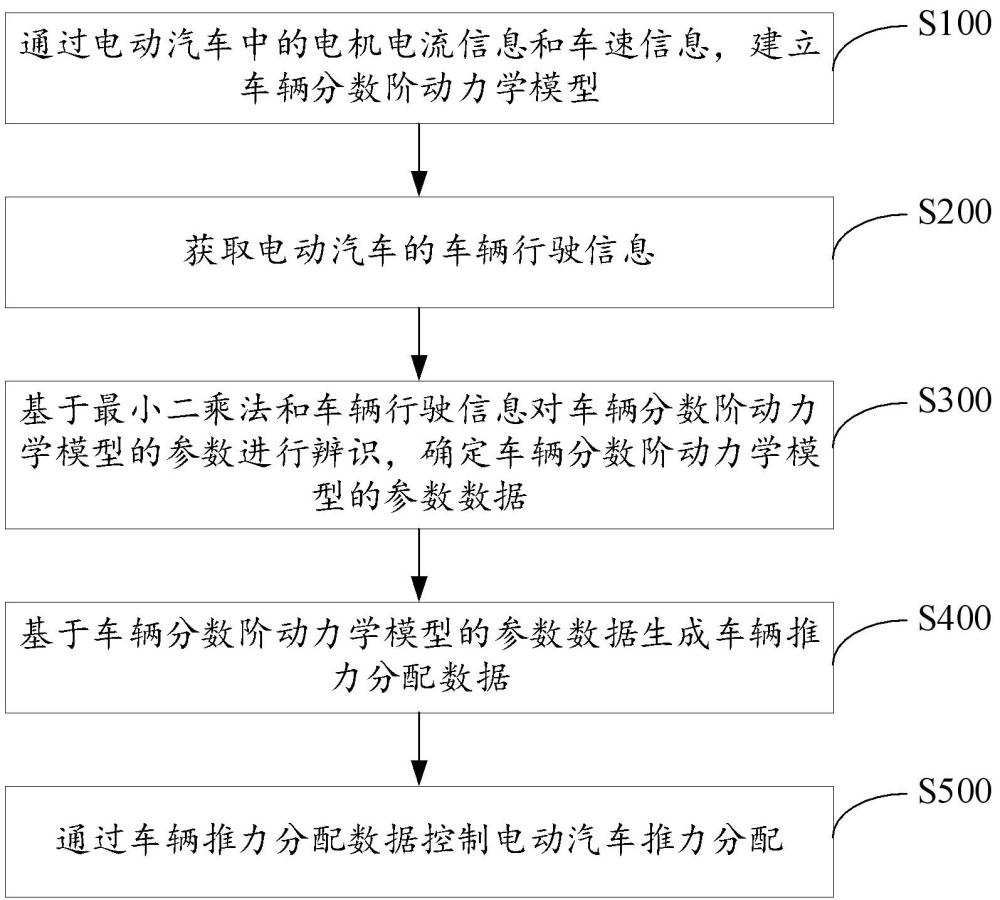
3、通过电动汽车中的电机电流信息和车速信息,建立车辆分数阶动力学模型;
4、获取所述电动汽车的车辆行驶信息;
5、基于最小二乘法和所述车辆行驶信息对所述车辆分数阶动力学模型的参数进行辨识,确定所述车辆分数阶动力学模型的参数数据;
6、基于所述车辆分数阶动力学模型的参数数据生成车辆推力分配数据;
7、通过所述车辆推力分配数据控制电动汽车推力分配。
8、在上述实现过程中,该电动汽车推力分配控制方法通过电动汽车中的电机电流信息和车速信息,建立车辆分数阶动力学模型,在基于车辆分数阶动力学模型和电动汽车的车辆行驶信息进行参数辨识后,生成车辆推力分配数据,最终实现电动汽车推力分配;该电动汽车推力分配控制方法通过建立车辆分数阶动力学模型,能够有效提高动力学模型的准确性,同时,也避免了车辆需要大量传感器进行数据融合来保证车辆控制性能的复杂性,降低了成本,且能够进一步提高电动车的驾驶性能;从而,该电动汽车推力分配控制方法可以实现在低成本前提下有效提升车辆动力学模型的准确性,以及有效优化车辆控制性能的技术效果。
9、进一步地,所述通过电动汽车中的电机电流信息和车速信息,建立车辆分数阶动力学模型的步骤,包括:
10、获取电动汽车的车辆运动方程,所述车辆运动方程表示为:
11、;
12、其中, ft代表汽车驱动力, m是汽车的质量, ades表示车辆期望加速度, fxb表示地面制动力, cd是空气阻力系数, f是滚动阻力系数, a是车辆的迎风面积, ρ是空气密度, v是车速, g是重力加速度;
13、通过所述车辆运动方程、电动汽车中的电机电流信息和车速信息,建立初始化的车辆分数阶动力学模型;
14、基于格里莱积分对所述初始化的车辆分数阶动力学模型进行离散化处理,获得离散化的车辆分数阶动力学模型。
15、在上述实现过程中,由电动汽车的行驶方程式(车辆运动方程)结合电动汽车中的电机电流信息和车速信息,并且忽略行驶过程中的坡度阻力和加速阻力,建立初始化的车辆分数阶动力学模型;从而,对上述连续时间分数阶模型,采用格里莱离散化方法,得到了离散时间域下的分数阶模型表达式,为数字化控制系统的实现奠定了基础,且该离散时间模型可以直接给出了为实现期望加速度所需施加的总电动机推力大小。
16、进一步地,所述初始化的车辆分数阶动力学模型表示为:
17、;
18、其中, iα代表了积分项, α为积分的阶次,表示车辆的加速度。
19、进一步地,所述电动汽车包括上层推力分配控制系统和下层电机控制系统,通过所述车辆推力分配数据控制电动汽车推力分配的步骤,包括:
20、将所述车辆推力分配数据输入至所述上层推力分配控制系统;
21、所述上层推力分配控制系统根据所述车辆推力分配数据生成期望加速度数据;
22、将所述期望加速度数据输入至所述下层电机控制系统;
23、所述下层电机控制系统根据所述期望加速度数据控制电动汽车推力。
24、进一步地,所述下层电机控制系统包括多个pid控制器和多个电机,每个所述pid控制器与对应的电机连接,所述期望加速度数据包括多个期望加速度信号,所述下层电机控制系统根据所述期望加速度数据控制电动汽车推力的步骤,包括:
25、所述下层电机控制系统将所述多个期望加速度信号分别发送至对应的pid控制器;
26、所述pid控制器根据获取到的期望加速度信号对所述电机进行控制。
27、进一步地,在通过所述车辆推力分配数据控制电动汽车推力分配的步骤之后,所述方法还包括:
28、根据分级预警模型和所述车辆分数阶动力学模型对所述电动汽车进行预警,所述分级预警模型包括ttc碰撞风险评估模型、分层预警模型、蜂鸣器报警设置中的一种或多种。
29、在上述实现过程中,通过分级预警模型和车辆分数阶动力学模型对电动汽车进行预警,从而确保预警信息的准确性。
30、第二方面,本技术提供了一种电动汽车推力分配控制装置,包括:
31、动力学模型单元,用于通过电动汽车中的电机电流信息和车速信息,建立车辆分数阶动力学模型;
32、车辆行驶信息单元,用于获取所述电动汽车的车辆行驶信息;
33、参数辨识单元,用于基于最小二乘法和所述车辆行驶信息对所述车辆分数阶动力学模型的参数进行辨识,确定所述车辆分数阶动力学模型的参数数据;
34、推力分配单元,用于基于所述车辆分数阶动力学模型的参数数据生成车辆推力分配数据;
35、推力控制单元,用于通过所述车辆推力分配数据控制电动汽车推力分配。
36、进一步地,所述动力学模型单元具体用于:
37、获取电动汽车的车辆运动方程,所述车辆运动方程表示为:
38、;
39、其中, ft代表汽车驱动力, m是汽车的质量, ades表示车辆期望加速度, fxb表示地面制动力, cd是空气阻力系数, f是滚动阻力系数, a是车辆的迎风面积, ρ是空气密度, v是车速, g是重力加速度;
40、通过所述车辆运动方程、电动汽车中的电机电流信息和车速信息,建立初始化的车辆分数阶动力学模型;
41、基于格里莱积分对所述初始化的车辆分数阶动力学模型进行离散化处理,获得离散化的车辆分数阶动力学模型。
42、进一步地,所述电动汽车包括上层推力分配控制系统和下层电机控制系统,所述推力控制单元具体用于:
43、将所述车辆推力分配数据输入至所述上层推力分配控制系统;
44、所述上层推力分配控制系统根据所述车辆推力分配数据生成期望加速度数据;
45、将所述期望加速度数据输入至所述下层电机控制系统;
46、所述下层电机控制系统根据所述期望加速度数据控制电动汽车推力。
47、进一步地,所述下层电机控制系统包括多个pid控制器和多个电机,每个所述pid控制器与对应的电机连接,所述期望加速度数据包括多个期望加速度信号,所述推力控制单元还用于:
48、所述下层电机控制系统将所述多个期望加速度信号分别发送至对应的pid控制器;
49、所述pid控制器根据获取到的期望加速度信号对所述电机进行控制。
50、进一步地,所述电动汽车推力分配控制装置还包括预警单元,用于:根据分级预警模型和所述车辆分数阶动力学模型对所述电动汽车进行预警,所述分级预警模型包括ttc碰撞风险评估模型、分层预警模型、蜂鸣器报警设置中的一种或多种。
51、第三方面,本技术提供的一种电子设备,包括:存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面任一项所述的方法的步骤。
52、第四方面,本技术提供的一种计算机可读存储介质,所述计算机可读存储介质上存储有指令,当所述指令在计算机上运行时,使得所述计算机执行如第一方面任一项所述的方法。
53、第五方面,本技术提供的一种计算机程序产品,所述计算机程序产品在计算机上运行时,使得计算机执行如第一方面任一项所述的方法。
54、本技术公开的其他特征和优点将在随后的说明书中阐述,或者,部分特征和优点可以从说明书推知或毫无疑义地确定,或者通过实施本技术公开的上述技术即可得知。
55、为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
本文地址:https://www.jishuxx.com/zhuanli/20240718/254226.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表