用于土方设备和操作的监测工具、系统和方法与流程
- 国知局
- 2024-08-01 05:29:48
本公开涉及一种用于监测土方操作的监测工具、系统和过程。
背景技术:
1、挖掘机和铲斗的多个配置是已知的,并且两者都存在变化。图1a-1b示出了土方设备的两个实例。图1a示出了配备有臂架2、操纵杆20和用于收集土料24的铲斗3的挖掘机。图1b示出了配备有具有用以释放土料24a的铰链门10a的铲斗3a的电缆铲。参考图2,铲斗3包含限定空腔16的壳4,所述空腔用于在挖掘操作期间收集材料。壳4包含具有用以将铲斗3附接到土方设备1的支撑件8的后壁12,以及位于后壁12的各侧的一对相对侧壁14。铲斗3具有限定铲斗3的挖掘缘34的唇缘5。斗齿7和/或护罩9通常固定到挖掘缘34以保护所述缘34、使唇缘5前面的地面破碎和/或将材料收集到铲斗3中。例如美国专利9,222,243中所公开的多个斗齿7和护罩9可以附接到铲斗3的唇缘5。
2、参考图3-4,每个斗齿7包含焊接到唇缘5的接合器11、安装在接合器11上的中间接合器13和安装在中间接合器13上的尖端(也称为尖顶)15。尖端15包含用以接收中间接合器13的鼻部17的向后开口的空腔18,以及用以穿透地面的前端部19。中间接合器13包含用以接收接合器11的鼻部23的向后开口的空腔22。锁21用于将尖端15固定到中间接合器13并且将中间接合器13固定到接合器11(图4)。其它斗齿布置也是可能的,例如美国专利7,882,649中所公开的。
3、在此实例中,尖端15通常会磨损且需要多次更换。中间接合器13可以被称作此磨损零件的基部。然而,中间接合器13也可以被称作磨损零件。同样,虽然接合器11是中间接合器13的基部,但接合器11也可以被视为磨损时可以更换的磨损零件。当此类磨损零件达到推荐的最小磨损轮廓(例如,磨损构件被视为完全磨损)时,产品会被更换,以便开采量不会减少并且其上安装有磨损零件的基部不会经历不必要的磨损。
4、在使用期间,此类接合地面用产品可能会遇到负载重和磨损高的状况。这些状况可能会导致产品磨损或与土方设备分离。例如,当铲斗接合地面时,例如尖端或中间接合器的磨损零件可以与挖掘缘分离。土方设备的操作员可能无法总能看到此类产品何时已与铲斗分离。继续操作接合地面用产品(例如,尖端)缺失的土方设备可能会导致开采量减少和/或唇缘、铲斗壁或土方设备上的其它组件过度磨损。还已知的是,在采矿环境中丢失的磨损零件可能会对下游设备(例如,破碎机)造成损坏,进而例如可能会导致设备的计划外停机和开采量损失。如果磨损零件卡在破碎机中,则所述磨损零件可能会弹出并给工人带来危险,或者所述磨损零件可能会卡住且需要操作员移开零件,这有时可能是困难、耗时和/或危险的过程。斗齿和/或护罩的过度磨损还可能会导致设备效率和开采量减少、燃料消耗的成本增大等。
5、存在已用于监测磨损零件以便确定磨损零件何时需要更换和/或何时已丢失的现有系统,并且取得了不同程度的成功。例如,motion metrics售卖的系统使用安装在挖掘设备上的光学相机来确定磨损零件的磨损量和磨损零件何时丢失。然而,用于监测地面接合用产品的当前系统由于环境、有限的观察能力等因素而未能始终提供令人满意的结果。
技术实现思路
1、本公开涉及用于监测土方设备、磨损零件、操作和/或例如在采矿和施工中发现的土料的一种监测工具、系统和/或方法。
2、在一个实例中,一种监测工具包含无人驾驶载具和缆。所述载具包含电子装置,以监测关于土方操作的至少一个特性且传输关于所述至少一个特性的信息。所述缆将所述无人驾驶载具连接到基站装置(home device)。
3、在另一实例中,一种监测工具包含:基站装置;具有电子装置的无人驾驶载具,其用以监测关于土方操作的至少一个特性且传输关于所述至少一个特性的信息;以及缆,其将所述无人驾驶载具连接到所述基站装置。
4、在另一实例中,一种监测系统包含至少一个土方设备和监测工具。所述监测工具包含:基站装置;具有电子装置的无人驾驶载具,其用以监测关于土方操作的至少一个特性且传输关于所述至少一个特性的信息;以及缆,其将所述无人驾驶载具连接到所述基站装置。
5、在上述实例中的任一者中,所述缆可以任选地提供电力和/或数据传输。所述无人驾驶载具可以是远程控制或自主的,或其一些组合。所述无人驾驶载具可以是空中和/或地面载具。
6、在另一实例中,所述无人驾驶载具连接到基站装置。所述基站装置可以是独立装置、固定到运输载具、土方设备和/或其它结构,或者可以是载具、设备等。所述无人驾驶载具通过缆连接到所述基站装置,以进行固定、供电,和/或将数据传输到所述无人驾驶载具和/或从所述无人驾驶载具传输数据。所述基站装置可以包含电源,以向所述监测工具提供电力的。所述基站装置可以包含收发器,以将数据接收和发送到远程装置和/或从远程装置接收和发送数据。所述基站装置还可以包含处理器,以基于从所述监测工具接收到的信息作出确定。
7、各种上述实施方案和实例可以结合或独立地使用。为了更好地理解本公开的优点和特征,可以参考以下描述事项和附图,其描述并示出与本公开有关的各种配置和概念。
技术特征:1.一种用于监测矿场中的挖掘操作的方法,所述方法包括:
2.根据权利要求1所述的方法,其中,所述至少一个传感器包括用于收集所述土料的高光谱图像的高光谱传感器,所述处理器使用所述高光谱图像来表征所述土料中的材料。
3.根据权利要求1或2所述的方法,其中,所述至少一个传感器向所述土料发射x射线并收集所述x射线从所述土料中的矿石的反射,所述处理器使用所述反射来表征所述土料中的材料。
4.根据前述权利要求中任一项所述的方法,其中,所述至少一个传感器向所述土料发射偏振光并收集所述偏振光从所述土料中的矿石的反射,所述处理器使用所述反射来表征所述土料中的材料。
5.根据权利要求1所述的方法,其中,所述至少一个传感器收集与所述土料中的矿石有关的信息,所述处理器使用所述信息确定所述土料中的矿石含量。
6.根据前述权利要求中任一项所述的方法,其中,所述处理器使用来自所述至少一个传感器的信息来确定所述土料的破碎。
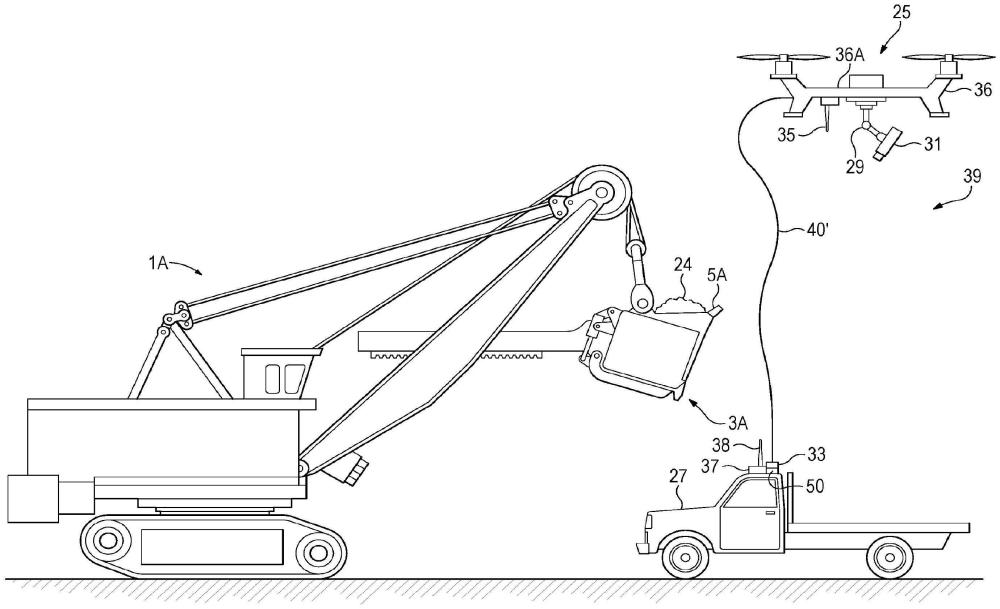
7.根据前述权利要求中任一项所述的方法,其中,所述无人驾驶载具(36)被系缆到基站装置(33),缆为所述无人驾驶载具和/或至少一个传感器供电,并且将所收集的信息从至少一个传感器传输到所述远程装置。
8.根据前述权利要求中任一项所述的方法,其中,所述无人驾驶载具是无人驾驶飞行器(36a)。
9.根据前述权利要求中任一项所述的方法,其中,所述至少一个传感器使用红外波长来收集关于所述土料的信息。
10.根据前述权利要求中任一项所述的方法,其中,所述至少一个传感器使用紫外波长来收集关于所述土料的信息。
11.根据前述权利要求中任一项所述的方法,其中,所述无人驾驶载具在所述矿场中接近待挖掘的土堰并收集关于所述土堰的一部分中的土料的信息,并且所述处理器处理所收集的信息并对所述土堰做出确定以在挖掘所述土堰中使用。
12.根据权利要求11所述的方法,其中,所述处理器使用由所述至少一个传感器收集的信息来确定所述土堰的至少一部分中的矿石浓度。
13.根据权利要求11或12所述的方法,其中,所述处理器使用由所述至少一个传感器收集的信息来确定所述土堰的至少一部分的坡度角。
14.根据权利要求11至13中任一项所述的方法,其中,所述处理器使用由所述至少一个传感器收集的信息来确定用于挖掘所述土堰的至少一部分的经优化的挖掘路径。
15.根据权利要求11至14中任一项所述的方法,其中,所述至少一个传感器操作以在挖掘所述土料时收集关于所述土堰的至少一部分的信息。
技术总结一种用于监测土方操作的至少一个特性的系统和监测工具。所述监测工具包含无人驾驶载具和将所述无人驾驶载具连接到基站装置的缆。所述缆可以提供用于向所述无人驾驶载具传输信息和/或电力的安全连接。技术研发人员:N·D·考吉尔受保护的技术使用者:爱斯科集团有限责任公司技术研发日:技术公布日:2024/4/29本文地址:https://www.jishuxx.com/zhuanli/20240722/220051.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种无人机机巢的制作方法
下一篇
返回列表