一种可调节高度的快插型无人机机架
- 国知局
- 2024-08-01 05:30:23
本技术涉及无人机,特别地涉及一种可调节高度的快插型无人机机架。
背景技术:
1、无人机广泛应用于国家生态环境保护、航空摄影、测绘、矿产资源勘探、灾情监视、交通巡逻、电力巡线、治安监控、应急减灾、应急指挥、航拍、农林植保、地理测绘、物流运输、线路巡检等领域。随着无人机市场规模不断扩大,无人机的硬件开发也越来越注重机架的稳固性、轻量性、低成本以及组装的简易性。
2、现今传统无人机机架大多由碳纤维塑板及管材通过繁多的螺钉紧固堆叠而成,结构复杂,并且易出现无人机无法正常飞行和材料的大量浪费的现象,传统无人机组装较为复杂,专业性较强,普通人不易上手组装。无人机向大众市场的普及要求无人机机架更加简洁,成本降低,易于拆装,并在结构上具有稳固性。
技术实现思路
1、为了解决背景技术中存在的问题,本实用新型提供一种可调节高度的快插型无人机机架。
2、本实用新型采用以下技术方案:一种可调节高度的快插型的无人机机架,包括4个机臂、4 个2 种机臂连接关节、电机座组件和中心板组件。
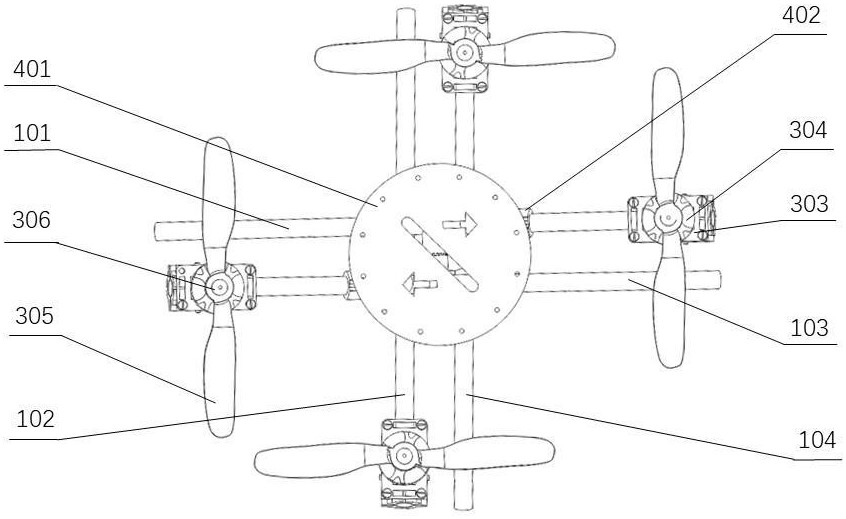
3、所述机臂分为两组:机臂一和机臂三为一短机臂组,机臂二和机臂四为一长机臂组,每个机臂一侧都有两个孔洞,用于线材的通过;所述机臂上端用于连接所述的电机座组件3,下端用作无人机机架的支撑脚;
4、所述机臂连接关节有两种:一种为方齿机臂连接关节一和方齿机臂连接关节三,方齿机臂连接关节上下两部分各有一个能够使机臂穿过的孔,这两个孔的相对位置可以通过改变方齿复合位置而改变,从而简单实现机架高度的调节;另一种为活动机臂连接关节二和活动机臂连接关节四,活动机臂连接关节上部分为一个带有孔的圆柱体和一个小球的连接体,下部分为一个带有孔的圆柱体和半开凹槽球壳。
5、 所述4 个机臂通过所述的4 个2 种机臂连接关节互相交叉连接,机臂先分为两组,机臂一和机臂三为一组,机臂二和机臂四为一组,具体交叉连接方式是:机臂101 和机臂103分别插入机臂连接关节201,机臂102 和机臂104 分别插入机臂连接关节203,机臂102 和机臂104 放置在机臂101 和机臂103 上方,再将机臂102 和机臂101 分别插入机臂连接关节202的上半部分和下半部分,再将机臂104 和机臂103 分别插入机臂连接关节204的上半部分和下半部分。调节机臂101 和机臂103 的下方机臂长度一样,再将机臂102 和机臂104 下方机臂调至和机臂101、机臂103 下方机臂在同一水平面(通过地面调水平)。
6、所述电机座组件由电机夹管、电机夹臂、电机底座、电机、正反螺旋桨、固紧桨纽构成,所述电机通过螺钉固定在电机底座上,所述正反螺旋桨固定在电机的轴上;所述电机底座下方通过紧固螺钉连接在电机夹臂上。
7、所述中心板组件包括中心板、2 个中心板管托及2 个中心板连轴;2 个中心板管托分别套在机臂2 和机臂4 上;所述中心板上有2 个连接铰,2 个连接铰分别通过中心板连轴与2个中心板管托通过紧固螺钉进行铰接;
8、与之前已经存在的无人机相比,本实用新型提出的机架构造方案具有以下优势:本实用新型使用4 个机臂通过4 个机臂连接关节交叉连接,通过改变方齿复合位置,从而可以改变机臂所穿的两个孔的相对位置,从而简单实现机架高度的调节。机臂交叉连接并调节好4 个机臂下方后,机臂下端可直接作为支撑脚架;本机架构造的最大优点是,组装简单易学,结构稳定,机臂同时具有脚架和机身功能,较传统无人机机架更加简洁,节省材料成本与时间成本:电机座角度可调,机架高度可调。
技术特征:1.一种可调节高度的快插型无人机机架,其特征在于包括4个机臂(1)、4个机臂连接关节(2)、电机座组件(3)和中心板组件(4);
2.根据权利要求1 所述的一种可调节高度的快插型无人机机架,其特征在于,所述机架高度可通过方齿机臂连接关节一(201)、方齿机臂连接关节三(203)不同的复合位置实现,通过活动机臂连接关节二(202)、活动机臂连接关节四(204)调节实现长短机臂脚架在同一水平面。
技术总结本技术公开了一种可调节高度的快插型无人机机架,包括4个机臂、4个机臂连接关节(其中1个为方齿关节,1个为反方齿关节,1个为球形活动关节,1个为凹形活动关节)、电机座组件和中心板组件;所述4个机臂分成2组,两两先通过方齿机臂连接关节相互交叉连接,再分别将两组中的机臂通过活动机臂连接关节互相连接并用锁紧球扣固紧,机架高度可由关节的咬合不同而实现高度调节;所述电机组件由电机夹管、电机夹臂、电机底座、电机、正反螺旋桨、固紧桨纽构成,电机底座与电机夹臂间可自由调节角度;本技术无人机可简单进行机架高度的调节,可适用于不同场景,且组装简单快速,结构稳定,脚架和机身合二为一,较传统无人机机架更加简单,节省材料成本与时间成本。技术研发人员:李新凯,刘子正,丁一笑,徐梓文,龚文杰受保护的技术使用者:新疆大学技术研发日:20230516技术公布日:2024/4/29本文地址:https://www.jishuxx.com/zhuanli/20240722/220094.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。