一种卫星异构飞轮构型与组合使用方法与流程
- 国知局
- 2024-08-01 05:36:36
本发明涉及卫星姿态控制,特别涉及一种卫星异构飞轮构型与组合使用方法。
背景技术:
1、为了提高卫星的姿态机动能力,提高卫星数据获取效率,在卫星控制系统设计时多采用多控制力矩陀螺方案,但是控制力矩陀螺成本高、系统构成复杂、控制方法复杂、失效率高。
2、随着大力矩飞轮技术逐渐成熟,加装大力矩飞轮的异构飞轮构型可提供卫星更强的机动能力,而避免采用多控制力矩陀螺带来的一系列问题。
技术实现思路
1、本发明要解决现有技术中的技术问题,提供一种卫星异构飞轮构型与组合使用方法。
2、为了解决上述技术问题,本发明的技术方案具体如下:
3、一种卫星异构飞轮构型,包括:
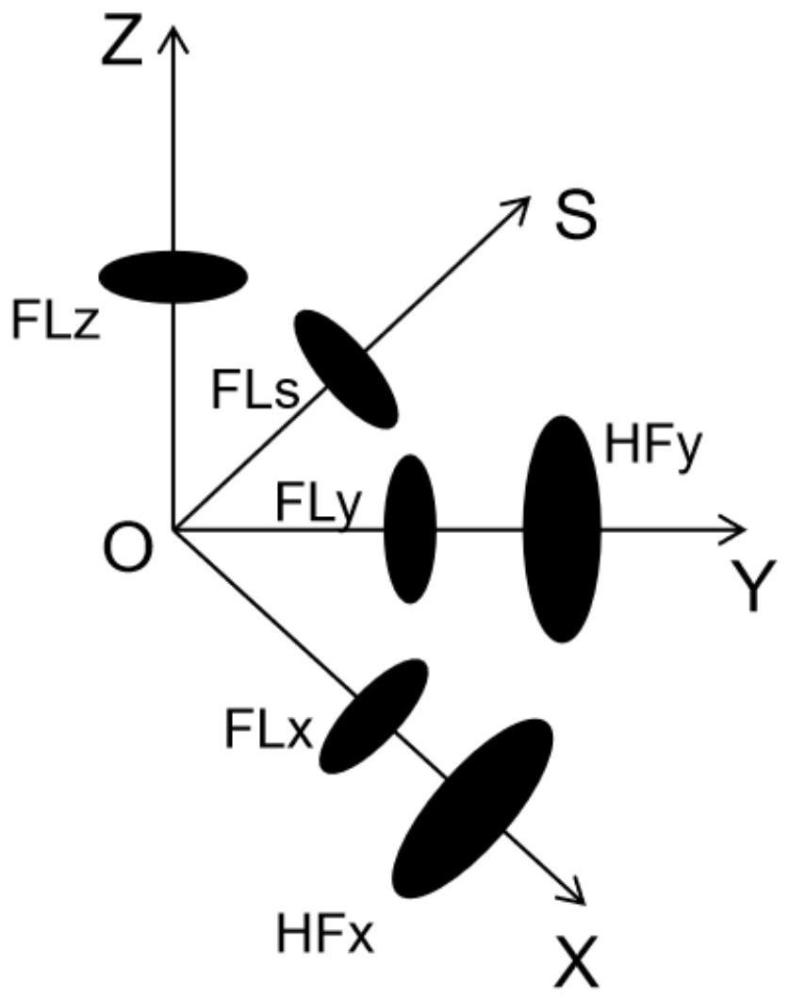
4、4个常规角动量飞轮:常规角动量飞轮flx、常规角动量飞轮fly、常规角动量飞轮flz和常规角动量飞轮fls;
5、2个大力矩飞轮:大力矩飞轮hfx和大力矩飞轮hfy;
6、其中,常规角动量飞轮flx、常规角动量飞轮fly、常规角动量飞轮flz的角动量方向分别与卫星坐标系x、y、z方向平行;常规角动量飞轮fls的角动量方向与卫星坐标系x、y、z三轴的夹角绝对值约为57.3度;大力矩飞轮hfx和大力矩飞轮hfy的角动量方向分别与卫星坐标系x、y轴平行。
7、一种上述的卫星异构飞轮构型的组合使用方法,包括以下步骤:
8、步骤(1):当卫星未执行任务,且飞轮均可正常工作时,使用常规角动量飞轮flx、常规角动量飞轮fly、常规角动量飞轮flz进行三轴姿态控制;
9、步骤(2):当卫星执行任务,且飞轮均可正常工作时,启用大力矩飞轮hfx和大力矩飞轮hfy,与常规角动量飞轮共同执行姿态控制;任务执行结束后,关闭大力矩飞轮hfx和大力矩飞轮hfy;
10、步骤(3):当卫星的常规角动量飞轮发生故障失效时:
11、1)常规角动量飞轮flx、常规角动量飞轮fly、常规角动量飞轮flz中有一个飞轮在轨失效时,关闭失效飞轮,并启用常规角动量飞轮fls;
12、2)当卫星的常规角动量飞轮flx、常规角动量飞轮fly、常规角动量飞轮flz、常规角动量飞轮fls中有两个飞轮在轨失效时:
13、a)如常规角动量飞轮flx、常规角动量飞轮fly飞轮失效,则关闭这两个飞轮,并启用大力矩飞轮hfx或大力矩飞轮hfy,启用常规角动量飞轮fls;
14、b)如常规角动量飞轮flx、常规角动量飞轮fls飞轮失效,则关闭这两个飞轮,并启用大力矩飞轮hfx;
15、c)如常规角动量飞轮fly、常规角动量飞轮fls飞轮失效,则关闭这两个飞轮,并启用大力矩飞轮hfy;
16、d)如常规角动量飞轮flx、常规角动量飞轮flz飞轮失效,则关闭这两个飞轮,并启用大力矩飞轮hfx、常规角动量飞轮fls;
17、e)如常规角动量飞轮fly、常规角动量飞轮flz飞轮失效,则关闭这两个飞轮,并启用大力矩飞轮hfy、常规角动量飞轮fls;
18、f)如常规角动量飞轮flz、常规角动量飞轮fls飞轮失效,则认为失去三轴姿态控制能力。
19、在上述技术方案中,步骤(2)具体包括:
20、1)当卫星执行姿态机动任务,attmission标志为true时,而且判断接入允许标志hfin为true时,大力矩飞轮(大力矩飞轮hfx和大力矩飞轮hfy)接入系统,接受控制系统分配的控制力矩;当标志attmission为false或hfin为false时,大力矩飞轮(大力矩飞轮hfx和大力矩飞轮hfy)不接入系统,由常规角动量飞轮flx、常规角动量飞轮fly、常规角动量飞轮flz实现卫星姿态控制;
21、2)当卫星执行完成姿态机动任务后,attmission为false且姿态稳定即姿态误差atterror绝对值小于0.05度时,向大力矩飞轮hfx、大力矩飞轮hfy发送不大于大力矩飞轮hfx、大力矩飞轮hfy最大输出力矩ht的1/2作为控制力矩,力矩方向为大力矩飞轮减速方向;当大力矩飞轮转速speedhflx、speedhfly绝对值小于该飞轮最大转速speedmax的1/100时,大力矩飞轮力矩设置为0,并关机。
22、本发明具有以下有益效果:
23、本发明的卫星异构飞轮构型,采用的异构飞轮构型简单、易实现、成本低,对于卫星实现快速机动能力得到显著提升。
24、本发明的卫星异构飞轮构型的组合使用方法,大力矩飞轮参与和退出姿态控制的逻辑简洁、清晰易于工程实现。
技术特征:1.一种卫星异构飞轮构型,其特征在于,包括:
2.一种权利要求1所述的卫星异构飞轮构型的组合使用方法,其特征在于,包括以下步骤:
3.根据权利要求2所述的卫星异构飞轮构型的组合使用方法,其特征在于,步骤(2)具体包括:
技术总结本发明涉及一种卫星异构飞轮构型与组合使用方法,该卫星异构飞轮构型,包括:常规角动量飞轮FLx、常规角动量飞轮FLy、常规角动量飞轮FLz和常规角动量飞轮FLs;大力矩飞轮HFx和大力矩飞轮HFy;常规角动量飞轮FLx、常规角动量飞轮FLy、常规角动量飞轮FLz的角动量方向分别与卫星坐标系X、Y、Z方向平行;常规角动量飞轮FLs的角动量方向与卫星坐标系X、Y、Z三轴的夹角绝对值约为57.3度;大力矩飞轮HFx和大力矩飞轮HFy的角动量方向分别与卫星坐标系X、Y轴平行。本发明的异构飞轮构型简单、易实现、成本低,对于卫星实现快速机动能力得到显著提升;本发明的卫星异构飞轮构型的组合使用方法,大力矩飞轮参与和退出姿态控制的逻辑简洁、清晰易于工程实现。技术研发人员:李峰,钟兴,张雷,陈志刚受保护的技术使用者:长光卫星技术股份有限公司技术研发日:技术公布日:2024/5/12本文地址:https://www.jishuxx.com/zhuanli/20240722/220618.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表