一种开裂式阻力方向舵驱动系统
- 国知局
- 2024-08-01 05:36:37
本发明属于飞行器操纵系统,具体涉及一种开裂式阻力方向舵驱动系统。
背景技术:
1、飞翼布局飞机取消了垂尾和平尾设计,在操纵中采用开裂式阻力方向舵实现长航时、高隐身等性能要求。开裂式阻力方向舵不仅可以在飞翼式飞机飞行过程中起扰流板的减速作用,还可以代替常规布局飞机的方向舵进行有效的航向操纵。这种布局形式具有很多优点,但同时也对飞行器的控制方面和偏航稳定性提出了新的要求。
2、开裂式阻力方向舵是通过开裂舵面偏转使得机翼获得偏航力矩,实现飞行器运动方向控制。开裂式阻力方向舵一般包括两个可以反向偏转的舵面,通常是依靠两个伺服电机、两套控制系统分别驱动伺服电机转轴转动,通过驱动连杆机构将运动转化为舵面的绕轴转动,实现两舵面的开合。
3、但是由于传统舵面开合驱动机构控制驱动元件和传动机构零件数量较多,使得飞行器整体重量增加,导致飞行器控制的同步性下降,操纵效率降低。另外,由于开裂式阻力方向舵的开合舵面占整个机翼的空间小,基于机翼气动外形及飞行器的气动性能考虑,在机翼有限空间内设计的传动机构的力臂较短,会导致动力传递效果差,且对伺服电机的驱动稳定性要求高。
4、因此,有必要设计新的开裂式阻力方向舵舵面偏转机构,以采用较少的控制元件和传动零件实现两舵面打开,来改善飞行器的气动特性和操纵特性,对飞机的偏航操纵、巡航减阻、起降平稳性以及节省燃料增加航时具有重要意义。
技术实现思路
1、本发明的目的在于解决现有开裂式阻力方向舵舵面偏转机构中控制和传动零件数量繁多,动力传递效果差,以及飞行器整体重量偏重导致飞行器控制同步性和操纵效率低的问题,而提出一种开裂式阻力方向舵驱动系统,采用一套伺服电机控制系统以及配套的传动机构,节省了所需机翼内部空间,并且提高了传动机构的动力传递效果和控制效率。
2、为实现上述目的,本发明所提供的技术解决方案是:
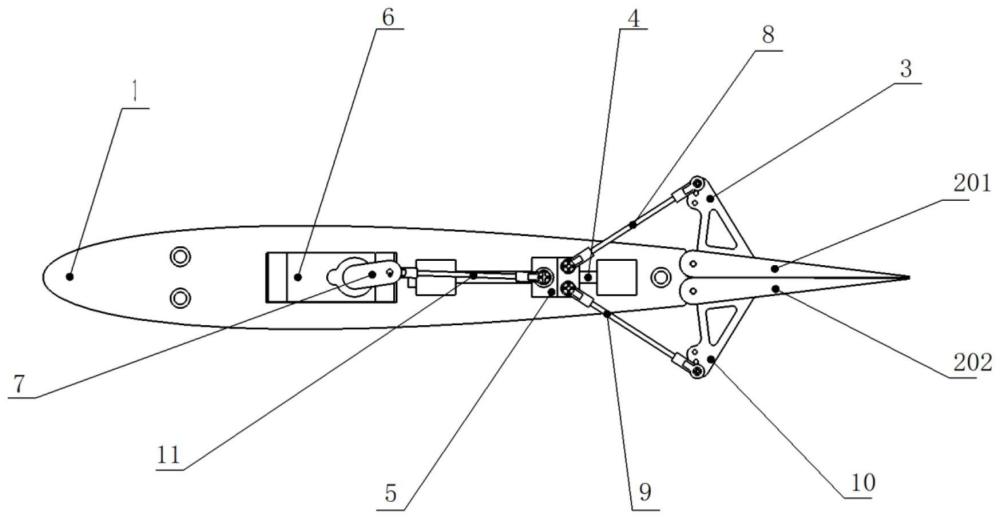
3、一种开裂式阻力方向舵驱动系统,其特殊之处在于,包括固定机翼段、开裂式阻力方向舵和驱动机构,所述开裂式阻力方向舵包括上开裂方向舵和下开裂方向舵,上下对称设置在固定机翼段后缘;
4、所述开裂式阻力方向舵沿翼展方向与固定机翼段后缘转动连接,在所述驱动机构的驱动作用下,所述上开裂方向舵和下开裂方向舵能够同时对称向外打开或向内闭合;
5、所述驱动机构沿机翼弦向设置在固定机翼段内侧壁上;
6、所述驱动机构包括微控器、伺服电机、曲柄-滑块-偏心曲柄机构、上舵角、下舵角和整流罩;所述伺服电机转轴设置在固定机翼段内侧壁1/3位置处,且靠近固定机翼段前缘;
7、所述曲柄-滑块-偏心曲柄机构包括曲柄、滑块-滑轨组件、前拉杆、上拉杆和下拉杆;
8、所述曲柄一端与所述伺服电机转轴固连,另一端与前拉杆一端转动连接;
9、所述滑块-滑轨组件包括滑轨和滑块,所述滑轨两端固定在固定机翼段内侧壁上,所述滑块安装在滑轨上,能够沿所述滑轨往复滑动;
10、所述滑块外表面上设有第一铰接孔、相对于所述第一铰接孔对称设置的第二铰接孔和第三铰接孔;所述前拉杆另一端通过所述第一铰接孔与所述滑块连接,上拉杆一端和下拉杆一端分别通过所述第二铰接孔和第三铰接孔与所述滑块转动连接;
11、所述上开裂方向舵和下开裂方向舵的外侧面根部分别固定有上舵角和下舵角,所述上舵角和下舵角分别与所述上拉杆和下拉杆的另一端转动连接;
12、所述微控器用于控制所述伺服电机转动角度,以调整所述开裂式方向舵的开合角度;
13、所述整流罩截面形状与所述固定机翼段翼剖面形状相同,整流罩沿机翼弦向安装在固定机翼段内侧壁上,且整流罩外表面与所述固定机翼段外表面平齐,并将所述伺服电机、曲柄、滑块-滑轨组件和前拉杆包裹在其腔体内。
14、进一步的,所述固定机翼段内侧壁上沿弦向设有第一定位块和第二定位块;
15、所述第一定位块和第二定位块上同轴设有矩形安装通孔;
16、所述滑轨两端分别过盈配合安装在所述矩形安装通孔内;滑轨截面为与所述安装通孔匹配的矩形,防止滑块滑动时因受力不均绕所述滑轨转动。
17、进一步的,所述第一定位块和第二定位块与所述固定机翼段为一体结构。
18、进一步的,所述滑块一端设有限位凸台。
19、进一步的,所述滑块为矩形结构,所述矩形结构上设有与所述滑轨配合的矩形安装孔;
20、所述滑块外侧一端设有矩形缺口,矩形缺口底壁上沿机翼展向设置一柱状结构,所述第一铰接孔沿所述柱状结构轴线开设;
21、所述第二铰接孔和第三铰接孔位于与所述矩形缺口相邻的凸台上。
22、进一步的,所述曲柄-滑块-偏心曲柄机构中各部件采用铝合金或碳纤维制成。
23、进一步的,所述上舵角和下舵角形状相同,为直角三角形结构,上舵角和下舵角与上拉杆和下拉杆的转动平面共面;
24、所述上舵角和下舵角的一直角边分别沿机翼弦向固定在上开裂方向舵和下开裂方向舵外表面根部;另一直角边靠近固定机翼段后缘沿竖向设置,且外端部分别与上拉杆和下拉杆铰接。
25、进一步的,所述上开裂方向舵和下开裂方向舵根部为圆弧外壁,圆弧外壁两端对称开有弧形卡槽;
26、所述固定机翼段后缘端面处上下对称设有与所述上开裂方向舵和下开裂方向舵根部圆弧外壁相匹配的弧形槽;所述弧形槽两端设有与上开裂方向舵和下开裂方向舵上环形卡槽相匹配的弧形凸起。
27、进一步的,所述固定机翼段内部设有若干斜支柱,所述斜支柱依次连接呈之字形,相邻所述斜支柱之间夹角为60°。
28、进一步的,所述驱动系统中驱动机构根据以下设计方法获得,包括以下步骤:
29、步骤1,建立固定机翼段、开裂式阻力方向舵和所述驱动机构的三维仿真模型;初始设置所述驱动机构中各部件参数,所述参数包括伺服电机在固定机翼段内侧壁上的固定位置,曲柄、前拉杆、上拉杆和下拉杆的长度,舵角的高度,滑块上前拉杆连接点到滑块上的上拉杆连接点和下拉杆连接点的竖直距离a和水平距离b。
30、步骤2,伺服电机转轴转动角度设为零,此时开裂式阻力方向舵上下舵面贴合,上下开裂方向舵之间夹角为0°;
31、然后调节伺服电机转动角度至180°,在所述曲柄不超过固定机翼段气动外型并不与整流罩发生干涉的条件下,判断上开裂方向舵和下开裂方向舵之间夹角是否达到设计所需目标角度;
32、如果满足,则进入步骤4优化操纵效率;
33、如果不满足,则进入步骤3优化所述驱动机构各部件参数;
34、步骤3,优化所述模型中驱动机构各部件参数;
35、步骤3.1,增大曲柄长度,所述曲柄转动时不超过固定机翼段气动外型且不与整流罩发生干涉;
36、步骤3.2,调节舵角、前拉杆、上拉杆和下拉杆的长度,以及以及滑块的滑动距离;滑块滑动的距离应保证传递的平稳性;
37、步骤3.3,优化后,设定伺服电机转动角度为180°,判断上开裂方向舵与下开裂方向舵之间夹角是否达到设计所需目标角度;
38、若满足,则进入步骤4,进行操纵效率优化;
39、若不满足,则按照步骤3.1-步骤3.2重新优化所述驱动机构各部件参数;
40、步骤4,定义滑块上第一铰接孔到第二铰接孔或第三铰接孔的竖直距离为a,水平距离为b,调节竖直距离a和水平距离b,优化操纵效率;具体步骤为:
41、步骤4.1,调节竖直距离a和水平距离b;
42、步骤4.2,通过机构运动仿真获得伺服电机转动角度与舵面开合角度之间的关系曲线,根据所述曲线关系得到舵面打开总角度为设计所需目标角度时伺服电机的转动角度,记录此时竖直距离a和水平距离b;
43、步骤4.3,重复步骤4.1-步骤4.2,选取舵面打开总角度为设计所需目标角度时伺服电机的最小转动角度,以此时竖直距离a和水平距离b作为最优设计参数。
44、本发明的优点是:
45、本发明中驱动机构包括采用偏心曲柄-滑块-曲柄式传动机构,采用一个伺服电机控制所述传动机构运动,实现开裂式阻力方向舵的两个舵面同时反向开合,控制元件及传动零件少,减轻了机翼整体质量,同时避免了两舵面开合角度不一致、不同步的问题,提高了飞行器的偏航效率。
46、本发明中采用滑块作为运动导向装置,采用矩形孔并配合矩形截面滑轨,限制了滑块的自由度,避免了滑块在受力不均时绕滑轨旋转。
47、本发明中采用微控制板对伺服电机角度进行精准控制,实现对开裂式阻力方向舵舵面的开合角度的控制,提高了舵面开合精度。
48、本发明中上开裂方向舵和下开裂方向舵根部设计为圆弧外壁,圆弧外壁两端对称设计有弧形卡槽,固定机翼段后缘端面上下对称设有与上开裂方向舵和下开裂方向舵根部圆弧外壁相匹配的弧形槽,弧形槽两端对称设有与上开裂方向舵和下开裂方向舵上环形卡槽相匹配的弧形凸起,确保了机翼表面的平整和过渡光滑,避免了上开裂方向舵和下开裂方向舵舵面角度变化时,固定机翼段与开裂式阻力方向舵连接处产生较大间隙影响飞行器气动外形影响,同时提高了所述驱动机构的驱动效率。
本文地址:https://www.jishuxx.com/zhuanli/20240722/220619.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表