一种面向空间盘绕式伸展臂在轨展开的故障处理系统
- 国知局
- 2024-08-01 05:40:04
本发明涉及宇宙航行飞行器,具体是一种面向空间盘绕式伸展臂在轨展开的故障处理系统。
背景技术:
1、近年来,随着太空探索的深入,对轻质、高收纳率、高稳定性的空间可展开机构的需求越来越迫切。空间盘绕式伸展臂作为一种典型的一维柔性展开机构,具有质量轻、功耗小、展开收拢比大的优点,应用前景广阔。空间盘绕式伸展臂本身可作为太阳能帆板、雷达天线等大型空间设备在轨展开的柔性展开机构,同时也可以为有特殊要求的卫星系统部件、空间探测设备等提供基础支撑。无论何种用途,均要求空间盘绕式伸展臂可在轨完全展开,在卫星上成功部署。太空环境复杂恶劣,空间盘绕式伸展臂的记忆合金材料受高低温环境影响,同时阻尼器、编码器和绕线轮等设备在太空中也比在地面上更加容易出现故障。一旦出现故障,将导致空间盘绕式伸展臂无法完全展开甚至无法展开,这势必会对卫星平台及空间任务的执行产生重大影响。因此,针对空间盘绕式伸展臂在轨展开发生故障的情况,设计了一种故障处理系统,保障卫星平台安全和空间任务的顺利实施。
技术实现思路
1、针对上述背景技术现状,提出了一种面向空间盘绕式伸展臂在轨展开的故障处理系统。
2、为实现上述目的,本发明提供如下技术方案:
3、一种面向空间盘绕式伸展臂在轨展开的故障处理系统,所述故障处理系统包括空间盘绕式伸展臂系统和卫星平台两部分,空间盘绕式伸展臂系统位于卫星平台一侧:其中,所述卫星平台装有星务计算机,星务计算机采用以cortextm-m4为内核的stm32f429igt6高性能微控制器;所述空间盘绕式伸展臂系统由顶板、主臂、加速度传感器、收纳筒、拔销器、编码器、阻尼器、绕线轮、导线轮系统、锁紧拉杆、拉索、底座组成;所述导线轮系统由舵机、滚动轴承、支撑基座、l型框架曲柄连杆机构、花键、联轴器、导线轮组成;
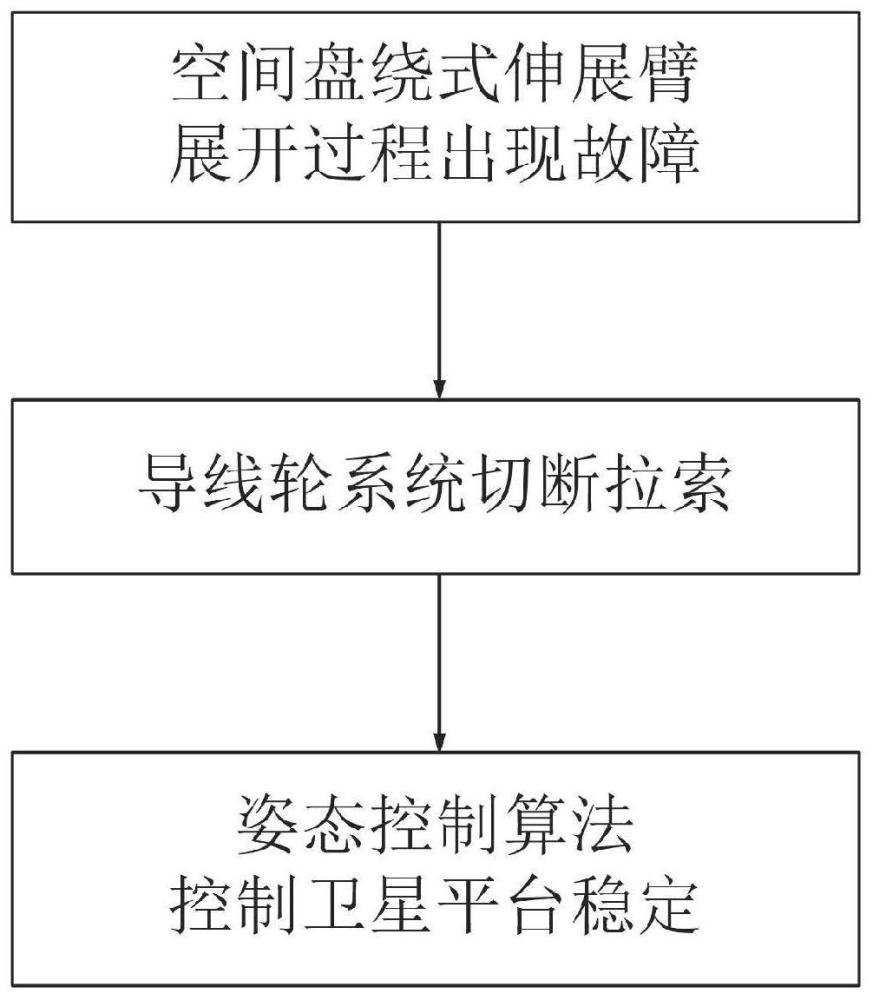
4、故障处理系统的故障处理流程包括以下步骤:
5、步骤一:星务计算机发送控制信息至拔销器,拔销器解除锁定,在阻尼器和拉索的作用下主臂逐节展开,编码器记录主臂展开长度并将信息实时传给星务计算机,若展开长度不是主臂全长且长时间保持恒定,星务计算机判读主臂展开故障;
6、步骤二:星务计算机发送控制信息至舵机,舵机开机带动导线轮转动和l型框架曲柄连杆机构运动,同时做出绷紧拉索、切割拉索、摩擦拉索三个动作,拉索在一段时间后断开;
7、步骤三:拉索断开后,主臂在自身变形能作用下无控制展开,加速度传感器检测到主臂的运动信号变化,将信息实时传给星务计算机,星务计算机判读拉索断开,控制舵机关机停止转动,同时迅速切换并运行姿态控制算法,保持卫星平台的姿态稳定。
8、作为本发明进一步的技术方案,所述顶板下端安装有加速度传感器,主臂上端与顶板连接,主臂下端穿过收纳筒与底座连接,收纳筒内开有小孔,主臂可以从中穿过,底座与卫星平台连接;所述锁紧拉杆上端与顶板连接,锁紧拉杆下端与拉索连接,拉索通过导线轮之后绕在绕线轮上,锁紧拉杆下端开有通孔,拉索的材料为凯夫拉绳;主臂展开前,主臂被盘绕在收纳筒内,此时拔销器销子插入锁紧拉杆下端通孔,限制主臂转动展开;所述编码器固定在绕线轮转轴一侧,用来记录主臂展开的长度;所述阻尼器固定在绕线轮转轴另一侧,用来控制主臂的展开,防止主臂展开过快。
9、作为本发明进一步的技术方案,所述导线轮的中间部分的1/3区域为粗糙磨砂面,其余2/3区域为较光滑的铝合金表面,导线轮初始状态为粗糙磨砂面向上,不与拉索接触;导线轮随舵机转动,且导线轮为逆时针转动,导线轮的粗糙磨砂面会和横向拉索间歇式接触,每接触一次便会绷紧拉索一次,同时摩擦拉索一次,这样往复多次拉索会被磨断。
10、作为本发明进一步的技术方案,所述导线轮转轴一侧安装在支撑基座上,支撑基座中间安装有滚动轴承;所述导线轮转轴另一侧通过联轴器与舵机轴连接,舵机轴穿过该侧的支撑基座,舵机固定在支撑基座上,舵机轴转动范围为±60°,舵机在关机状态转轴锁死,不会发生转动。
11、作为本发明进一步的技术方案,所述l型框架曲柄连杆机构由曲柄、连杆、滑块、l型框架、花键、刀片组成;曲柄一端安装在舵机轴上,曲柄与舵机轴接触部分用花键连接,可用来传递扭矩;曲柄另一端通过螺钉与连杆一端连接,连杆另一端与l型框架下端通过螺钉连接,l型框架下端与滑块固定在一起,可与滑块共同运动;l型框架上端开有凹槽和通孔,刀片刀身部分嵌入凹槽内,刀刃部分外露,个螺钉穿过通孔将l型框架上端和刀片固定;舵机可驱动曲柄连杆转动,进而带动滑块在支撑基座内侧的凹槽上来回滑动,从而实现l型框架和刀片上下移动,做出切割拉索的动作。
12、作为本发明进一步的技术方案,拉索断开后,主臂在自身变形能作用下无控制展开对卫星平台造成扰动,在星务计算机微控制器嵌入姿态控制算法实现卫星平台再次稳定;所述姿态控制算法分为两个步骤:
13、步骤一:建立空间盘绕式伸展臂与卫星平台组合体的动力学模型:
14、
15、其中,为姿态角向量,u=[tdxtdy tdz ]t为控制力矩输入向量,d=[ddx ddy ddz]t为由盘绕式伸展臂无控展开过程引起的冲击和振动所带来的等效扰动,ωo为轨道角速度;因为盘绕式伸展臂对卫星平台的扰动会引起组合体转动惯量的变化,组合体的转动惯量可以写为:为转动惯量标准值;δii是组合体转动惯量的最大变化量,δi是转动惯量变化的系数,描述了卫星模型变化的不确定性;另外,有:
16、
17、
18、
19、
20、
21、
22、δm=diag(δx,δy,δz);δd=diag(δx,δx,δz,δz,δy,δy);
23、δk=diag(δy,δy,δx,δz,δz,δx);
24、gd=[ξm,ξd,ξk];
25、
26、
27、步骤二:设计自适应pid控制律:
28、
29、其中,kp=k1δi、ki=k2δi、kd=k3δi,k1、k2、k3为常数。
30、与现有技术相比,本发明的有益效果是:
31、本发明所提出的一种面向空间盘绕式伸展臂在轨展开的故障处理系统,其故障处理策略和流程符合工程实际,所设计的结构机构可快速、高效处理空间盘绕式伸展臂无法展开的故障,所提出的姿态控制算法可有效稳定空间盘绕式伸展臂无控制展开后的卫星姿态,全方位确保卫星平台的在轨安全和空间任务的顺利实施。本发明所提出的一种面向空间盘绕式伸展臂在轨展开的故障处理系统安全可靠,在工程上易于实现,具有较强的工程价值。
技术特征:1.一种面向空间盘绕式伸展臂在轨展开的故障处理系统,其特征在于,所述故障处理系统包括空间盘绕式伸展臂系统和卫星平台两部分,空间盘绕式伸展臂系统位于卫星平台一侧:其中,所述卫星平台装有星务计算机;所述空间盘绕式伸展臂系统由顶板、主臂、加速度传感器、收纳筒、拔销器、编码器、阻尼器、绕线轮、导线轮系统、锁紧拉杆、拉索、底座组成;所述导线轮系统由舵机、滚动轴承、支撑基座、l型框架曲柄连杆机构、联轴器、导线轮组成;
2.根据权利要求1所述的一种面向空间盘绕式伸展臂在轨展开的故障处理系统,其特征在于,所述顶板下端安装有加速度传感器,主臂上端与顶板连接,主臂下端穿过收纳筒与底座连接,收纳筒内开有小孔,主臂从中穿过,底座与卫星平台连接;所述锁紧拉杆上端与顶板连接,锁紧拉杆下端与拉索连接,拉索通过导线轮之后绕在绕线轮上,锁紧拉杆下端开有通孔;主臂展开前,主臂被盘绕在收纳筒内,此时拔销器销子插入锁紧拉杆下端通孔,限制主臂转动展开;所述编码器固定在绕线轮转轴一侧,用来记录主臂展开的长度;所述阻尼器固定在绕线轮转轴另一侧,用来控制主臂的展开,防止主臂展开过快。
3.根据权利要求1所述的一种面向空间盘绕式伸展臂在轨展开的故障处理系统,其特征在于,所述导线轮的中间部分的1/3区域为粗糙磨砂面,其余2/3区域为较光滑的铝合金表面,导线轮初始状态为粗糙磨砂面向上,不与拉索接触;导线轮随舵机转动,且导线轮为逆时针转动,导线轮的粗糙磨砂面会和横向拉索间歇式接触,每接触一次便会绷紧拉索一次,同时摩擦拉索一次,这样往复多次拉索会被磨断。
4.根据权利要求1所述的一种面向空间盘绕式伸展臂在轨展开的故障处理系统,其特征在于,所述导线轮转轴一侧安装在支撑基座上,支撑基座中间安装有滚动轴承;所述导线轮转轴另一侧通过联轴器与舵机轴连接,舵机轴穿过支撑基座,舵机固定在支撑基座上,舵机轴转动范围为±60°,舵机在关机状态转轴锁死,不会发生转动。
5.根据权利要求1所述的一种面向空间盘绕式伸展臂在轨展开的故障处理系统,其特征在于,所述l型框架曲柄连杆机构由曲柄、连杆、滑块、l型框架、花键、刀片组成;曲柄一端安装在舵机轴上,曲柄与舵机轴接触部分用花键连接,用于传递扭矩;曲柄另一端通过螺钉与连杆一端连接,连杆另一端与l型框架下端通过螺钉连接,l型框架下端与滑块固定在一起,与滑块共同运动;l型框架上端开有凹槽和通孔,刀片刀身部分嵌入凹槽内,刀刃部分外露,螺钉穿过通孔将l型框架上端和刀片固定;舵机驱动曲柄连杆转动,进而带动滑块在支撑基座内侧的凹槽上来回滑动,从而实现l型框架和刀片上下移动,做出切割拉索的动作。
6.根据权利要求1所述的一种面向空间盘绕式伸展臂在轨展开的故障处理系统,其特征在于,拉索断开后,主臂在自身变形能作用下无控制展开对卫星平台造成扰动,在星务计算机微控制器嵌入姿态控制算法实现卫星平台再次稳定;所述姿态控制算法分为两个步骤:
技术总结本发明涉及一种面向空间盘绕式伸展臂在轨展开的故障处理系统,属于宇宙航行飞行器技术领域。所提出的一种面向空间盘绕式伸展臂在轨展开的故障处理系统,其包括空间盘绕式伸展臂系统和卫星平台两部分。针对空间盘绕式伸展臂在轨展开发生故障的情况,设计了一种故障处理系统,保障卫星平台安全和空间任务的顺利实施。故障处理策略和流程分为三个步骤:空间盘绕式伸展臂展开过程出现故障、导线轮系统切断拉索、姿态控制算法控制卫星平台稳定。本发明所提出的一种面向空间盘绕式伸展臂在轨展开的故障处理系统安全可靠,在工程上易于实现,具有较强的工程价值。技术研发人员:孙亮,赵泽林,牛晓洁,黄海,陈珅艳,侯宝珅,刘家豪受保护的技术使用者:北京航空航天大学技术研发日:技术公布日:2024/5/19本文地址:https://www.jishuxx.com/zhuanli/20240722/220929.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
空投飞行器的制作方法
下一篇
返回列表