一种煤矿井下陆空协同检查用仿生蝴蝶巡检平台
- 国知局
- 2024-08-01 05:45:49
本发明涉及仿生机器,尤其涉及一种煤矿井下陆空协同检查用仿生蝴蝶巡检平台。
背景技术:
1、随着煤炭行业的大力发展,煤矿开采数量逐年上升,事故多发,而造成矿难事故发生的原因多种多样,如煤尘积聚爆炸,瓦斯浓度超标,防护设施故障等等,造成很多人员伤亡。因此,为保护煤矿工人的人身安全,进行定期巡检煤矿的安全情况以及预防事故发生都具有重要意义。而常规的煤矿巡检主要由巡检人员携带检查设备进行,能力不高,且易发生危险。
2、在现有技术中,主要采用小型车来实现煤矿井下巡检;该类巡检小型车由巡检人员控制,巡检巷道、设备等情况。然而,煤矿壁面塌陷时有发生,当掉落的煤、岩阻挡小型车前进的道路,小型车无法通过,巡检将无法进行。为此,李闯等人于煤矿防爆智能越障巡检机器人(专利号:cn218226626u)提出了一种智能越障履带车,但是履带车越障能力依然有限,遇到煤矿塌陷等造成的巨大障碍仍然无法逾越。为此,程健等人提出了一种煤矿井下防爆型四旋翼无人机(专利号:cn110182365a),通过无人机飞行穿越垮落煤岩,实现巡检。但该巡检无人机采用旋翼结构,尺寸较大,在狭小的矿洞中无法灵活飞行,避障巡检难度大。为此,王利栋等人于一种自带滑翔机式煤矿探测救援机器人及工作方法(专利号:cn113602386a)提出了一种滑翔机与轮式车结合的方案。该方案在轮式车遇到上述巨大障碍后,可以放飞滑翔机,通过滑翔机穿越障碍,完成障碍物后的巡检。然而,该方案在滑翔机发射之后无法回收,只能飞行一次,无法返航。针对该问题,王志强等人进一步于一种煤矿巷道空地巡检机器人及巡检方法(专利号:cn114536297a)提出了一种可返回扑翼机与履带车组合工作的方案。虽然该扑翼机可以返回,但无法在地面停留,只能飞行中拍摄巡检画面,巡检准确度不高,易遗漏潜在危险;且因为无法停留,需要不间断飞行,能量损耗大,无法长时间定点检测。因此,能否制造出一种能够有效穿越井下坍塌障碍,并能降落于井下复杂地面的飞行器是关键问题所在。综上,现有技术存在以下两点不足:
3、1、现有煤矿机器人采用的是轮式车与滑翔机的结合方案,在轮式车遇到障碍时,可以发射滑翔机,使得滑翔机可以向前巡检一段距离,扩大了巡检范围。但滑翔机只能向前飞行一次,巡检能力不足,且无法停留,无法返航;针对此问题,虽然已有应用扑翼机能够返航履带车的方法,但这类仿生扑翼机没有设计降落结构,依然无法在煤矿井下复杂地面停留,定点巡检困难;
4、2、现有飞行器中能应用在煤矿下环境的很少,如无人机体型较大,无法灵活飞行,一般用来进行安全监视,不能承担巡检任务;扑翼机体型较小,适合井下环境,但扑翼机起飞之后的降落方式主要为直接冲击,这种降落方式无法控制,降落时直冲地面,没有缓冲结构,地面反向冲击力较大,无法平稳降落,易损伤机体结构。
技术实现思路
1、发明目的:本发明的目的是提供一种兼具地面行走和空中飞行能力以及稳定着路的煤矿井下陆空协同检查用仿生蝴蝶巡检平台。
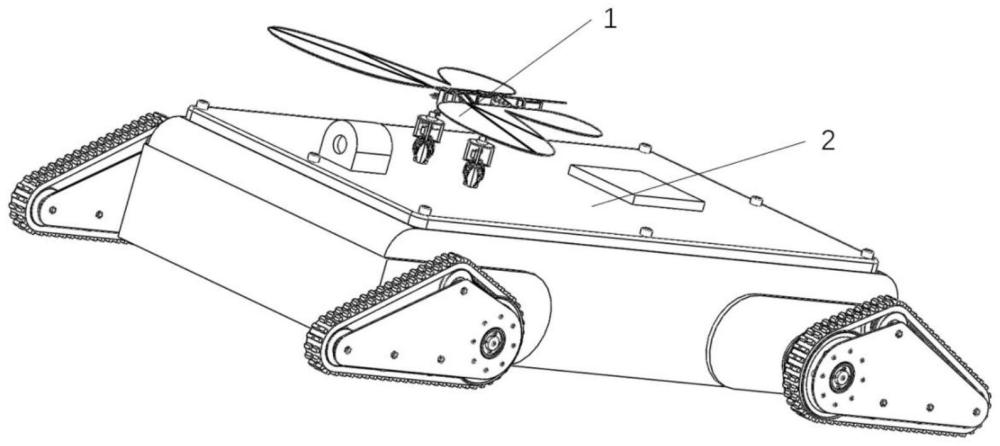
2、技术方案:一种煤矿井下陆空协同检查用仿生蝴蝶巡检平台,包括仿生蝴蝶飞行器和履带车;
3、所述履带车顶端前侧边缘处固定连接有巷道摄像单元,所述履带车顶端前侧设置有两个电磁铁,所述履带车顶端后侧设置有主系统;
4、所述仿生蝴蝶飞行器包括翅一和翅二,所述翅一和翅二之间下侧设置有腿部结构,所述腿部结构下端两侧固定连接有爪形结构,所述翅一和翅二之间设置有主支架,所述主支架下端中间的位置固定连接有控制器连接支架,所述控制器连接支架内设置有仿生蝴蝶控制系统,所述主支架上位于控制器连接支架后侧的位置套接有翅膀连接支架,所述翅膀连接支架两端与翅一和翅二铰接连接,所述主支架底部后端固定连接有电池连接支架,所述主支架前端固定连接有舵机支架,所述舵机支架两侧分别固定连接有第一驱动舵机和第二驱动舵机,所述电池连接支架内部固定连接有电池,所述腿部结构上设置有巡检摄像单元和地面监测摄像单元。
5、一种煤矿井下陆空协同检查用仿生蝴蝶巡检平台使用方法,包括以下步骤:
6、s1、履带车搭载仿生蝴蝶飞行器前进,主系统控制巷道摄像单元拍摄画面,自主规划路径;在遇到无法逾越的障碍时,主系统发出指令,电磁铁断电,仿生蝴蝶飞行器解锁;仿生蝴蝶控制系统控制第一驱动舵机、第二驱动舵机通过翅舵机臂带动翅一和翅二扑动,为仿生蝴蝶飞行器提供升力,从而实现飞行;
7、s2、飞行过程中,第一驱动舵机、第二驱动舵机通过改变运动的幅度和频率,以调节翅一和翅二的升力差异,进而实现飞行过程中的方向调节;巡检摄像单元不断拍摄前行画面,并传给巡检人员;收到巡检人员通过主系统发出的降落指令后,仿生蝴蝶飞行器启动地面监测摄像单元;
8、s3、当地面监测摄像单元分析地面,识别到地面崎岖时,通过爪部舵机、爪部舵机臂、推拉臂、推拉套筒带动推拉杆向上运动;由推拉杆带动三角连杆,在外侧连杆、内侧连杆、指部连杆的限制下对现场物体进行抓取作降落停留;识别到地面平整时,通过爪部舵机、爪部舵机臂、推拉臂、推拉套筒带动推拉杆向下运动;由推拉杆带动三角连杆,在外侧连杆、内侧连杆、指部连杆的限制下爪形结构完全打开,实现在地面定点巡检;仿生蝴蝶控制系统收到主系统发出返航指令时,变换爪形以飞行离开地面,返回履带车,通过地面监测摄像单元精准识别电磁铁并与其结合。
9、进一步地,所述翅一和翅二均包括翅舵机臂,所述翅舵机臂一侧设置有蝶形的翅外侧碳纤维杆,所述的翅外侧碳纤维杆内部固定连接有斜向的翅驱动轴碳纤维杆和横向的固定轴碳纤维杆,所述翅舵机臂同翅驱动轴碳纤维杆连接,所述翅外侧碳纤维杆内部铺设有翅膜,所述第一驱动舵机和第二驱动舵机转动端均与翅舵机臂连接。
10、进一步地,所述腿部结构包括固定连接于主支架底部前侧的上腿部支架,所述地面监测摄像单元固定连接于上腿部支架中间位置底部,所述上腿部支架两端底部均设置有第一固定杆,所述第一固定杆一侧转动连接有第一缓冲杆,所述第一缓冲杆下端转动连接有第二缓冲杆,所述第二缓冲杆底部转动连接有第二固定杆,所述第一固定杆和第一缓冲杆之间通过设置有第一缓冲弹簧连接,所述第一缓冲杆与第二缓冲杆之间通过设置有第二缓冲弹簧连接,所述第二缓冲杆与第二固定杆之间通过设置有第三缓冲弹簧连接,所述第二固定杆一侧固定连接有下腿部支架,所述爪形结构固定连接于下腿部支架底端。
11、进一步地,所述上腿部支架两端底部均固定连接有两个上腿部带孔连杆板,所述上腿部带孔连杆板一侧均设置有上方形杆套,所述上方形杆套顶端同上腿部支架固定连接。
12、进一步地,所述第一固定杆包括两个第一固定杆主干,所述第一固定杆主干之间一侧固定连接有第一固定杆突出结构,所述第一缓冲杆包括两个第一缓冲杆主干,所述第一缓冲杆主干之间中部和上部分别固定连接有第一缓冲杆中部突出结构和第一缓冲杆上部突出结构,所述第二缓冲杆包括两个第二缓冲杆主干,所述第二缓冲杆主干之间上部和中部分别固定连接有第二缓冲杆上部突出结构和第二缓冲干中部突出结构,所述第二固定杆包括两个第二固定杆主干,所述第二固定杆主干之间一侧固定连接有第二固定杆突出结构;
13、所述第一缓冲弹簧两端分别与第一固定杆突出结构和第一缓冲杆中部突出结构转动连接,所述第二缓冲弹簧两端分别与第一缓冲杆上部突出结构和有第二缓冲杆上部突出结构转动连接,所述第三缓冲弹簧两端分别与第二缓冲干中部突出结构和第二固定杆突出结构转动连接。
14、进一步地,所述下腿部支架顶端固定连接有四个均匀分布的下腿部带孔连杆板,所述下腿部带孔连杆板一侧设置有与下腿部支架固定连接有下方形杆套,所述巡检摄像单元固定连接于下腿部支架顶部一侧,所述下腿部支架两侧和前后侧均开设有爪部支架连接孔。
15、进一步地,所述爪形结构包括爪部支架,所述爪部支架上端设置有爪部传动结构,所述爪部支架上端设置有配合爪部传动结构使用的限位套,所述限位套内部设置有限位套卡槽,所述爪部支架下端两侧和前后侧均转动连接有内侧连杆和外侧连杆,所述内侧连杆下端转动连接有三角连杆,所述外侧连杆下端转动连接有指部连杆,所述爪部支架中心处插接有推拉杆,所述推拉杆底端两侧和前后侧开设有连接孔,所述三角连杆顶端与连接孔转动连接,所述推拉杆底端固定连接有强磁铁。
16、进一步地,所述爪部支架底部两侧和前后侧均开设有配合内侧连杆和外侧连杆使用的内侧孔和外侧孔,所述爪部支架顶端两侧和前后侧均固定连接有爪部连接杆,所述爪部连接杆顶部同爪部支架连接孔连接。
17、进一步地,所述爪部传动结构包括固定连接于爪部支架顶端一侧的爪部舵机卡槽板,所述爪部舵机卡槽板内部固定插接有爪部舵机,所述爪部舵机转动端固定连接有爪部舵机臂,所述爪部舵机臂上端一侧转动连接有推拉臂,所述推拉臂另一端转动连接有推拉套筒,所述推拉套筒固定套接于推拉杆上。
18、本发明与现有技术相比,其显著效果如下:
19、1、本发明的仿生蝴蝶飞行器兼具地面行走和空中飞行能力,且能够着陆在煤矿井下垮落后的复杂地面,配合履带车完成复杂的巡检任务。当履带车遇到垮落的煤、岩等所形成的巨大障碍无法前行,主系统发出指令,启动仿生蝴蝶飞行器越过障碍继续飞行巡检;在仿生蝴蝶飞行器控制系统发出降落指令后,地面监测摄像单元可拍摄地面并分析地表情况;通过改变爪形,仿生蝴蝶飞行器牢牢抓取煤矿井下垮落的碎石、碎煤以及其他物体,实现井下复杂地形着陆;仿生蝴蝶飞行器降落地面后也可重新起飞,返回履带车;履带车继续搭载仿生蝴蝶飞行器前往下个巡检地点。
20、2、仿生蝴蝶飞行器具有着陆缓冲功能,防止仿生蝴蝶飞行器在井下复杂地面环境着陆时冲击损坏。在仿生蝴蝶飞行器控制系统发出降落指令后,爪形结构首先落地,爪部支架连接下腿部支架通过第二固定杆,压缩第三缓冲弹簧、第二缓冲弹簧、第一缓冲弹簧,利用三级缓冲效果降低落地时带来的冲击力,实现平稳降落。
本文地址:https://www.jishuxx.com/zhuanli/20240722/221288.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。