云台装置及无人机的制作方法
- 国知局
- 2024-08-01 05:45:46
本技术涉及无人机的,更具体地说,是涉及一种云台装置及无人机。
背景技术:
1、随着无人机在各行业的广泛应用,航拍也变得越来越普遍,无人机高空飞行灵活度高,机动性强,移动迅速,在此条件下进行固定角度拍摄会造成图像重影,视频抖动,因此需要航拍摄像头具有自主角度调整和自稳能力,所以在摄像头上设置自增稳云台是必要的。然而,现有的云台均采用三轴控制,摄像头下置于无人机腹部方案,这样的方案造成无人机的俯仰角度以及横滚角度受限,导致摄像头无法正摄、俯瞰下摄、后摄,视场很受限制。例如在勘探,测绘等领域有时需要拍摄岩洞正上方,桥体正上方或者正下方,需要无人机自身不断调整角度,这样的过程严重影响测绘效率。
技术实现思路
1、本实用新型的目的在于提供一种云台装置及无人机,以解决现有技术中存在的摄像头设于无人机的腹部位置导致视场受限,影响测绘效率的技术问题。
2、为实现上述目的,本实用新型采用的技术方案是:
3、第一方面,提供一种云台装置,包括:
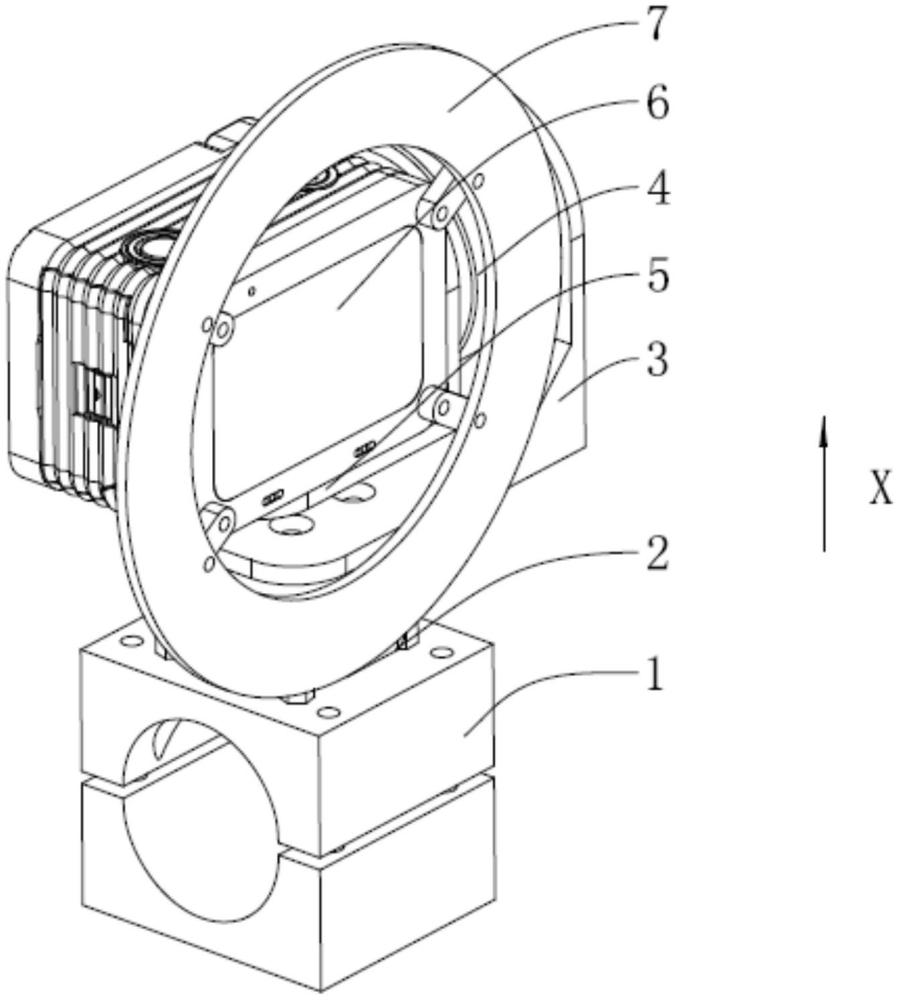
4、固定件、设于所述固定件上的第一转动轴、设于所述第一转动轴上的第一支架、设于所述第一支架上的第二转动轴、设于所述第二转动轴上的第二支架以及设于所述第二支架上的摄像机构;所述固定件用于固定于无人机在前进方向上的前侧部;所述第一转动轴与无人机的前进方向平行或者垂直,所述第一转动轴能够带动所述第一支架绕所述第一转动轴转动;所述第二转动轴与所述第一转动轴共面垂直,所述第二转动轴能够带动所述第二支架绕所述第二转动轴转动。
5、通过采用上述技术方案,扩大了云台装置上的摄像机构的视场,提高了无人机的测绘效率。
6、在一个实施例中,所述第一支架包括第一架体和与所述第一架体连接的第二架体,所述第一架体与所述第一转动轴连接,所述第二架体垂直设于所述第一架体的侧部,使所述第二架体与所述第一架体之间形成有第一架空部,所述第二转动轴、所述第二支架和所述摄像机构设于所述第一架空部中。
7、通过采用上述技术方案,第一支架呈“l”形结构,其形成有第一架空部,使得第二转动轴、第二支架和摄像机构能够被收容在第一架空部中,提高了结构的紧凑程度,缩小了整个云台装置的体积,使得云台装置小型化。
8、在一个实施例中,所述第二支架包括第三架体和与所述第三架体连接的第四架体,所述第三架体通过所述第二转动轴与所述第二架体连接,所述第四架体垂直设于所述第三架体的侧部,使所述第四架体与所述第三架体之间形成有第二架空部,所述摄像机构设于所述第二架空部中。
9、通过采用上述技术方案,第二支架呈“l”形结构,其形成有第二架空部,使得摄像机构能够被收容在第二架空部中,提高了结构的紧凑程度,缩小了整个云台装置的体积,使得云台装置小型化。
10、在一个实施例中,所述第一转动轴和所述第二转动轴均包括无刷电机、无刷电机驱动器以及编码器,所述无刷电机用于驱使支架转动;所述无刷电机驱动其用于驱动所述无刷电机电子换相、功率放大,实现所述无刷电机的旋转;所述编码器用于输出所述无刷电机的位置反馈信号,传感所述无刷电机的转子的位置,将位置反馈信号传输至所述无刷电机驱动器。
11、通过采用上述技术方案,无刷电机具有以下优点:无电刷、低干扰、噪音第、运转顺畅、寿命长以及维护成本低。
12、在一个实施例中,所述云台装置还包括主位姿传感器,所述主位姿传感器设于所述摄像机构上并且与所述第一转动轴和所述第二转动轴电连接,所述主位姿传感器用于反馈所述摄像机构的位姿。
13、通过采用上述技术方案,实现了对摄像机构的位置和姿态的调整,从而控制第一转动轴和第二转动轴运动实现摄像机构的自稳和角度控制。
14、在一个实施例中,所述云台装置还包括辅助位资传感器,所述辅助位资传感器设于所述第一转动轴和所述第二转动轴上,所述辅助位资传感器用于反馈所述第一转动轴和所述第二转动轴的位姿。
15、通过采用上述技术方案,第一转动轴和第二转动轴能够获取自身的位置和姿态以进一步提升转动角度的精确程度。
16、在一个实施例中,所述云台装置还包括环形的发光机构,所述发光机构围绕所述摄像机构设置。
17、通过采用上述技术方案,提高了云台装置的使用适应性,同时还提升了摄像机构的拍摄清晰度。
18、在一个实施例中,所述发光机构包括多个环形发光体以及与多个所述环形发光体电连接的亮度传感器,多个所述环形发光体沿着背离所述摄像机构的中心的方向依次布置。
19、通过采用上述技术方案,提高了发光机构亮度的可调性,进一步增加了发光机构的适用性。
20、在一个实施例中,所述固定件包括多个夹块以及紧固连接多个所述夹块的紧固件,多个所述夹块之间形成有与所述无人机配合的夹持槽。
21、通过采用上述技术方案,固定件采用夹持的方式固定在无人机上,其固定方式简单并且可靠性高。
22、第二方面,提供一种无人机,包括无人机本体和上述的云台装置,所述云台装置设于所述无人机本体在前进方向上的前侧部。
23、通过采用上述技术方案,在具有上述实施例的云台装置的优点的基础上,本实施例的无人机还具有可视角大,测绘效率高的优点。
技术特征:1.一种云台装置,其特征在于,包括:
2.如权利要求1所述的云台装置,其特征在于,所述第一支架包括第一架体和与所述第一架体连接的第二架体,所述第一架体与所述第一转动轴连接,所述第二架体垂直设于所述第一架体的侧部,使所述第二架体与所述第一架体之间形成有第一架空部,所述第二转动轴、所述第二支架和所述摄像机构设于所述第一架空部中。
3.如权利要求2所述的云台装置,其特征在于,所述第二支架包括第三架体和与所述第三架体连接的第四架体,所述第三架体通过所述第二转动轴与所述第二架体连接,所述第四架体垂直设于所述第三架体的侧部,使所述第四架体与所述第三架体之间形成有第二架空部,所述摄像机构设于所述第二架空部中。
4.如权利要求1所述的云台装置,其特征在于,所述第一转动轴和所述第二转动轴均包括无刷电机、无刷电机驱动器以及编码器,所述无刷电机用于驱使支架转动;所述无刷电机驱动其用于驱动所述无刷电机电子换相、功率放大,实现所述无刷电机的旋转;所述编码器用于输出所述无刷电机的位置反馈信号,传感所述无刷电机的转子的位置,将位置反馈信号传输至所述无刷电机驱动器。
5.如权利要求1所述的云台装置,其特征在于,所述云台装置还包括主位姿传感器,所述主位姿传感器设于所述摄像机构上并且与所述第一转动轴和所述第二转动轴电连接,所述主位姿传感器用于反馈所述摄像机构的位姿。
6.如权利要求5所述的云台装置,其特征在于,所述云台装置还包括辅助位资传感器,所述辅助位资传感器设于所述第一转动轴和所述第二转动轴上,所述辅助位资传感器用于反馈所述第一转动轴和所述第二转动轴的位姿。
7.如权利要求1所述的云台装置,其特征在于,所述云台装置还包括环形的发光机构,所述发光机构围绕所述摄像机构设置。
8.如权利要求7所述的云台装置,其特征在于,所述发光机构包括多个环形发光体以及与多个所述环形发光体电连接的亮度传感器,多个所述环形发光体沿着背离所述摄像机构的中心的方向依次布置。
9.如权利要求1至8任一项所述的云台装置,其特征在于,所述固定件包括多个夹块以及紧固连接多个所述夹块的紧固件,多个所述夹块之间形成有与所述无人机配合的夹持槽。
10.一种无人机,其特征在于,包括无人机本体和权利要求1至9任一项所述的云台装置,所述云台装置设于所述无人机本体在前进方向上的前侧部。
技术总结本技术提供了一种云台装置及无人机,其中云台装置包括:固定件、设于固定件上的第一转动轴、设于第一转动轴上的第一支架、设于第一支架上的第二转动轴、设于第二转动轴上的第二支架以及设于第二支架上的摄像机构;固定件用于固定于无人机在前进方向上的前侧部;第一转动轴与无人机的前进方向平行或者垂直,第一转动轴能够带动第一支架绕第一转动轴转动;第二转动轴与第一转动轴共面垂直,第二转动轴能够带动第二支架绕第二转动轴转动。通过采用上述技术方案,扩大了云台装置上的摄像机构的视场,改善拍摄环境,提高了无人机的测绘效率。技术研发人员:李清泉,黄奇,于文率,吴海明,田春宝受保护的技术使用者:人工智能与数字经济广东省实验室(深圳)技术研发日:20231115技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240722/221279.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表