飞行器控制表面部署系统的制作方法
- 国知局
- 2024-08-01 05:45:45
本公开涉及飞行器上的控制表面。本发明涉及飞行器控制表面的部署。更具体地,但不排他地,本发明涉及飞行器控制表面部署系统、飞行器结构、呈飞行器机翼的至少一部分的形式的飞行器结构、飞行器、将飞行器控制表面从降低位置移动至升高位置的方法以及将飞行器控制表面从升高位置移动至降低位置的方法。
背景技术:
1、飞行器扰流板是飞行器控制表面的示例。扰流板可以布置成使得扰流板从飞行器机翼向上部署,以便扰乱机翼上的气流,并且因此降低升力。这样的扰流板通常定位在机翼的外侧后缘上。可以设置有横跨机翼的翼展布置的几个扰流板。
2、扰流板可以布置成响应于从飞行员或飞行器控制系统接收的需求信号而部署,例如用于在阵风的情况下减小升力或用于载荷减轻的目的。扰流板必须高度灵敏,使得扰流板在接收到需求信号之后尽快起作用。
3、局部设置的致动器通常用于驱动扰流板从其收起/缩回位置移动至其部署位置。在扰流板收起时,扰流板的上表面可以形成机翼的上表面的被呈现给气流的一部分,并且扰流板然后在部署时可以从机翼向上旋转。还已知的是将一个或更多个扰流板通过机翼中的开口从机翼的本体内的收起位置向上竖向地部署至部署位置。在这样的布置中,当扰流板收起时,扰流板的极少部分——如果有的话——被呈现给机翼的上表面上的气流。
4、扰流板通常用在滑翔机上,但是在可能以大约0.8马赫的速度行进的现代喷气式飞行器上升高扰流板所需的力更大。可以满足增加的力需求同时仍以高速度操作的较高规格的致动器通常比用于在滑翔机上使扰流板升高的那些致动器要大。
5、us20110031347 a1公开了一种扰流板部署机构,该扰流板部署机构包括:剪式连杆机构,该剪式连杆机构附接至扰流板并且附接至机翼;以及致动器,该致动器附接至机翼和剪式连杆机构,使得移动致动器将扰流板升高和降低。然而,由于在机翼中围绕控制表面缺少局部空间,所以部署机构将不适合与更高规格的致动器一起使用。
6、因此,当寻求开发或改进用于飞行器的控制表面布置时,需要仔细考虑控制表面在飞行器上的位置以及控制表面如何部署和收起,这又对用于引起控制表面在部署位置与收起位置之间运动的致动机构的类型有影响。致动器的位置、尺寸和类型应该理想地选定成使得有效利用空间并且使得控制表面可以可靠地且重复地操作。在飞行器上,还重要的是确保任何解决方案都是质量有效的,并且不会不必要地给飞行器增加额外的质量,而没有对飞行器和/或飞行器的操作的其他方面产生任何相应的改进。
7、本发明寻求缓解上述问题中的一个或更多个问题。替代性地或附加地,本发明寻求提供一种改进的飞行器控制表面部署系统、一种改进的飞行器结构、一种呈飞行器机翼的至少一部分的形式的改进的飞行器结构、一种改进的飞行器、一种将飞行器控制表面从降低位置移动至升高位置的改进方法、和/或一种将飞行器控制表面从升高位置移动至降低位置的改进方法。
技术实现思路
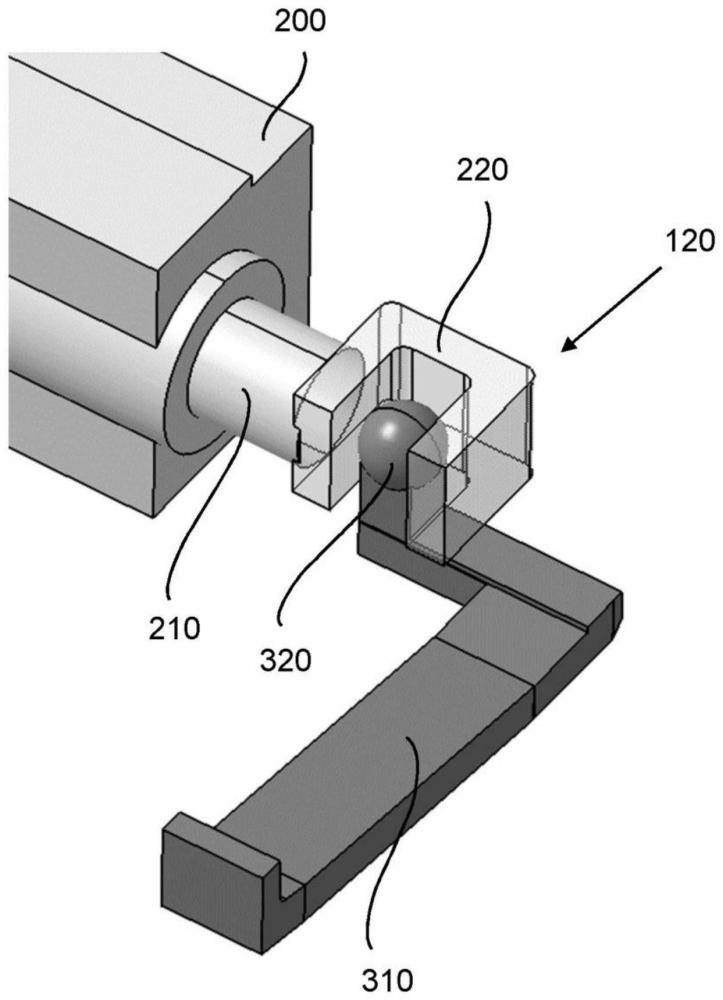
1、根据第一方面,本发明提供了一种飞行器控制表面部署系统。该系统包括用于升高飞行器控制表面的凸轮本体、用于移动凸轮本体的致动器、以及用于将致动器和凸轮本体连接的联接机构。致动器能够沿第一方向移动,这使凸轮本体沿用于升高飞行器控制表面的方向移动,并且致动器能够沿第二方向移动,这使凸轮本体沿用于降低飞行器控制表面的方向移动,第二方向与第一方向相反。致动器定位成与凸轮本体邻近,使得致动器沿与第一方向横向的方向偏离该凸轮本体。联接机构包括连接至凸轮本体的第一部分和连接至致动器的第二部分。联接机构包括第一接触点和第二接触点,第一部分和第二部分在第一接触点和第二接触点处相交,使得第一接触点使致动器能够将凸轮本体沿第一方向移动,使得第二接触点使致动器能够将凸轮本体沿第二方向移动,并且使得联接机构允许(联接机构的)第一部分相对于(联接机构的)第二部分沿与第一方向横向的方向移动。在本发明的实施方式中,将致动器靠近凸轮本体并与凸轮本体并排布置的能力能够有效利用空间。
2、当致动器沿着第一方向/第二方向移动时,凸轮本体的行进方向将通常与第一方向/第二方向接近平行,但不完全平行。由于制造公差、由于在操作期间飞行器的各部分的运动/弯曲等,通常将有一些方向的未对准、通常为+/-3度或更小(可选地不多于+/-1度)。因此,很难确保凸轮运动线和致动器运动线完全对准和平行,如果可能的话,考虑到致动器和凸轮本体彼此邻近,凸轮运动线和致动器运动线完全对准和平行将是希望的,这意味着在两个部分沿着它们相应的运动线进行运动期间,任何未对准都可能导致潜在显著的侧向力。在一些情况下,这可能会导致非常不希望的卡死。然而,在本发明的实施方式中的使用中,当致动器沿第一方向移动时,通过联接机构的第一接触点传输的力导致凸轮本体在沿着第一方向并大致平行于第一方向的方向上移动,使得凸轮本体导致飞行器控制表面升高(飞行器控制表面通常沿与第一方向不同的方向移动),其中,致动器的运动方向和凸轮本体的运动方向上的任何未对准都通过联接机构的第一部分相对于第二部分(沿与第一方向横向的方向)的所允许运动进行调节。
3、类似地,在这样的实施方式中,当致动器沿第二方向移动时,致动器使凸轮本体在沿着第二方向并大致平行于第二方向的方向上移动,使得凸轮本体导致飞行器控制表面下降(飞行器控制表面通常沿与第二方向不同的方向移动),其中,致动器和凸轮本体的不平行运动通过联接机构的第一部分和第二部分的所允许的相对运动进行调节。
4、将理解的是,致动器可以构造成沿第一方向和/或第二方向施加并承受高载荷(例如,至少1000牛顿),第一方向和第二方向平行于致动器的行程/运动轴线的方向。如果并且当凸轮本体的运动和致动器的运动完全对准时,载荷沿第一方向和/或第二方向在凸轮本体与致动器之间通过联接机构传递,而没有侧向载荷。在未对准的情况下,凸轮本体相对于致动器沿与第一方向和第二方向不平行的方向移动。控制表面部署系统特别是在致动器能够承受高载荷和高速度的情况下可能不能承受与致动器的行程/运动轴线垂直的大的侧向载荷,这些大的侧向载荷可能在没有联接机构所允许的相对运动的情况下以其他方式引起。将理解的是,例如,联接机构的第一部分和第二部分可以避免与致动器行程的方向/第一方向和第二方向横向的载荷的分量(全部地或部分地)传递至致动器,从而优选地将侧向载荷减小到零或接近零。在本发明的某些实施方式中,如将在下面进一步详细描述的,联接机构可以布置成使得可以减少和/或避免致动器/凸轮本体的扭曲或旋转载荷。
5、联接机构允许其第一部分相对于其第二部分沿横向方向的运动可以通过下述方式得到促进:第一接触点位于第一部分和第二部分中的一者上的第一表面与第一部分和第二部分中的另一者上的对应的第二表面之间,使得在致动器沿第一方向移动时,在两个表面之间保持接触,但是接触位置相对于第一表面和第二表面中的一者沿与第一方向横向的方向移动。因此,在第一表面与第二表面之间可能存在滑动接触。类似地,第二接触点可以相应地位于第一部分和第二部分上的两个相应表面之间,使得在致动器沿第二方向移动时,在两个表面之间保持滑动接触,从而允许联接机构的第一部分和第二部分沿横向方向的相对运动。
6、如上所述,联接机构可以布置成减少致动器/凸轮本体的扭曲或旋转载荷。这可以通过联接机构允许其第一部分相对于其第二部分的旋转运动来实现。例如,第一接触点可以位于(a)第一部分和第二部分中的一者上的第一表面与(b)第一部分和第二部分中的另一者上的对应的第二表面之间,使得在致动器沿第一方向或第二方向移动时,在两个表面之间保持接触,同时允许联接机构的各部分绕第一表面和第二表面的接触点相对旋转。
7、致动器定位成与凸轮本体邻近,使得致动器沿与第一方向横向的方向偏离凸轮本体。凸轮本体可以布置成线性地移动,并且具有从一个极端至另一极端的运动路径,运动路径的长度与由致动器的行程长度限定的运动路径的长度相等。随着凸轮本体移动(从一个极端至另一极端)包含所有凸轮本体的(假想)包络线与随着致动器移动包含所有致动器的包络线邻近且并排。这两个包络线可以沿着第一方向与致动器行程长度的至少一半、优选地该行程长度的至少75%(可能90%)交叠,并且优选地与最短假想包络线长度的至少一半、以及最短假想包络线长度的至少75%(可能90%)交叠。凸轮本体在第一方向/第二方向上的长度可以大于或大致等于致动器的行程长度。
8、联接机构的第一部分可以刚性地连接至凸轮本体。第二部分可以刚性地连接至致动器。致动器可以布置成沿第一方向和第二方向中的一个方向移动,使得致动器是推动运动(其中,致动器延伸)。致动器可以布置成沿第一方向和第二方向中的另一方向移动,使得致动器是拉动运动(其中,致动器缩回)。
9、优选地,联接机构的第一部分和第二部分中的一者包括第一刚性本体,第一刚性本体具有第一面和与第一面平行且相对的第二面。第一刚性本体的第一面和第二面可以形成接纳部分。优选地,联接机构的第一部分和第二部分中的另一者包括第二刚性本体,第二刚性本体具有至少两个凸起区域,所述至少两个凸起区域用于在第一接触点和第二接触点处与第一刚性本体接触。
10、表面的凸起区域突出或延伸超过该表面,使得在该表面与另一表面、例如平坦表面进行接触时,实际上存在单点接触(实际具有非常小的面积),而不是较大的接触面积。优选地,联接机构布置成使得在表面的凸起区域相对于凸起区域所接触的表面时,凸起区域上的接触点的位置也可以移动。这(凸起区域上接触点的位置移动)可以由于凸起区域是圆化的而得到促进。
11、第二刚性本体可以坐置在第一刚性本体的(如上文所述的)接纳部分内。
12、优选地,第二刚性本体为圆化的。例如,第二刚性本体可以至少部分是球状的。
13、具有两个凸起区域的和/或为圆化的第二刚性本体可以实现第一部分和第二部分的相对旋转运动。利用这种布置,联接机构可以允许具有多达五个自由度的运动,优选地具有五个自由度中的每个自由度的运动(例如,另一个即第六运动自由度是沿着致动器的第一力矩方向或第二力矩方向的线性运动)。
14、第二刚性本体的直径可以在10mm与200mm之间、例如在45mm与150mm之间。第二刚性本体的直径可以是100mm或更小、例如小于75mm。
15、联接机构的第一部分可以布置成使得该第一部分始终与凸轮本体一起移动(例如,联接机构的第一部分与凸轮本体成一体,或者以其他方式刚性地安装至凸轮本体)。联接机构的第二部分可以布置成使得该第二部分始终与致动器一起移动(例如,联接机构的第二部分与致动器成一体,或者以其他方式刚性地安装至致动器)。
16、优选地,联接机构的第一部分和第二部分中的至少一者为金属。优选地,联接机构的第一部分和第二部分都是金属的。在实施方式中,金属表面之间的接触点可以具有足够低的摩擦系数,以允许联接机构的第一部分相对于第二部分的足够运动。金属是耐用的,并且在使用期间耐磨损。所用的金属优选地是不易腐蚀的金属。该金属例如可以是不锈钢。
17、优选地,致动器具有行程长度,该行程长度在150mm与500mm之间、可能小于400mm——例如在200mm与300mm之间。
18、优选地,凸轮本体具有凸轮表面,凸轮表面布置成由凸轮从动件跟随,凸轮从动件连接至被升高(或降低)的飞行器控制表面。可以设置有布置成跟随凸轮表面的多个凸轮从动件,每个凸轮从动件引起单独的飞行器控制表面的运动。凸轮从动件可以成对布置,每对凸轮从动件引起单独的飞行器控制表面的运动。这种凸轮从动件的运动跨度可以在致动器行程长度的0.1倍至2倍之间。凸轮从动件的运动跨度可以在150mm与500mm之间。凸轮本体的长度可以大于致动器的行程长度。
19、优选地,飞行器控制表面部署系统布置成使得接触轴线——被限定为延伸穿过两个接触点中的每个接触点的假想直线——大致平行于第一方向和第二方向。特别地,接触轴线可以被限定为位于下述两个位置之间的假想直线:(i)当凸轮本体沿第一方向移动时第一接触点在第一部分或第二部分上的位置;以及(ii)当凸轮本体沿第二方向移动时第二接触点在第一部分或第二部分上的位置。因此,联接机构的第一部分和第二部分的运动可以仅被限制在一个方向上,该方向大致平行于第一方向和第二方向。
20、根据本发明的第二方面,还提供了一种飞行器结构(例如,机翼),该飞行器结构包括本文中所述或所要求保护的飞行器控制表面部署系统。飞行器控制表面可以是呈扰流板或空气制动器等的形式。飞行器控制表面布置成使得致动器沿第一方向的运动导致凸轮本体以升高飞行器控制表面的方式移动,并且使得致动器沿第二方向的运动导致凸轮本体以降低飞行器控制表面的方式移动。如上所述的凸轮从动件也可以形成系统的一部分。
21、优选地,飞行器控制表面位于飞行器的翼型表面的边缘、即前缘或后缘处,并且致动器和凸轮本体均在与边缘对准的方向上延伸。翼型表面可以是飞行器的机翼。
22、根据本发明的第三方面,还提供了一种呈飞行器机翼的至少一部分(或可能呈整个机翼)的形式的飞行器结构。机翼包括沿着机翼的边缘、即前缘或后缘布置的一个或更多个(优选地多个)控制表面装置。机翼还包括能够由线性致动器移动的长形凸轮本体。长形凸轮本体沿着凸轮轴线布置。在凸轮本体沿着凸轮轴线在一个方向上移动时,凸轮本体导致控制表面装置移动至完全部署位置,并且在凸轮本体沿着凸轮轴线在相反方向上移动时,凸轮本体导致控制表面装置移动远离部署位置。线性致动器包括致动器本体和致动器杆,该致动器杆布置成驱动凸轮本体,该杆通过从致动器本体伸出或缩回到致动器本体中而沿着致动轴线移动,以便使凸轮本体在沿着凸轮轴线的方向上移动。致动器和凸轮本体都在沿着边缘(前缘或后缘)的方向上延伸并且相对于彼此并排布置。凸轮轴线处于与致动轴线相同的方向上。优选的是,凸轮轴线大致平行于致动轴线。然而,通常情况是,不能保证凸轮轴线在使用中总是完全平行于致动轴。凸轮本体通过致动器的运动配置成通过联接器。该联接器包括第一对表面,由于该对表面中的一个表面沿(i)在两个表面之间的接触点处大致垂直于两个表面中的至少一个表面并且还(ii)大致平行于致动轴线的方向来推靠该对表面中的另一表面,该第一对表面对杆将凸轮本体沿着凸轮轴线在一个方向上驱动所需的力进行传递,同时允许表面之间的滑动运动,以减轻由凸轮轴线和致动轴线的未对准而引起的任何载荷。类似地,联接器还包括第二对表面,由于该对表面中的一个表面沿(i)在两个表面之间的接触点处大致垂直于两个表面中的至少一个表面并且还(ii)大致平行于致动轴线的方向来推靠该对表面中的另一表面,该第二对表面对杆将凸轮本体沿着凸轮轴线在相反方向上驱动所需的力进行传递,同时允许表面之间的滑动运动,以减轻由凸轮轴线和致动轴线的未对准而引起的任何载荷。
23、如上所述,当长形凸轮本体沿着凸轮轴线在一个方向上布置时,长形凸轮本体导致控制面装置移动至完全部署位置。可能的是,在长形凸轮本体沿着凸轮轴线沿相反方向移动时,长形凸轮本体导致控制表面装置移动至收起位置。
24、由于制造、组装的公差、各部分在使用中的运动或旋转、振动热效应和/或由于操作载荷引起的飞行器的弯曲,不能保证凸轮轴线在使用中总是完全平行于致动轴线。然而,本发明的第三方面的实施方式允许凸轮本体与致动器之间的联接器的表面之间的滑动运动,这有助于减轻由凸轮轴线和致动轴线的未对准而引起的任何载荷。
25、根据本发明的第四方面,还提供了一种飞行器,该飞行器包括本文中所述或所要求保护的飞行器结构。
26、根据本发明的第五方面,还提供了一种将飞行器控制表面在降低位置与升高位置之间移动的方法。飞行器控制表面可以是如本文中所述或所要求保护的飞行器控制表面部署系统和/或飞行器结构的一部分。该方法可以包括将致动器沿第一方向致动的步骤,该致动器通过位于两个表面之间传输载荷的接触点使凸轮本体沿第一方向移动,同时允许两个表面之间在与第一方向横向的方向上的运动;该致动器定位成与凸轮本体邻近且并排。
27、该方法可以包括将飞行器控制表面从降低位置移动至升高位置。该方法可以包括将飞行器控制表面从升高位置移动至降低位置。这可以包括将致动器沿第二方向致动的步骤,该致动器通过位于两个表面之间传输载荷的接触点使凸轮本体沿第二方向移动,同时允许两个表面之间在与第二方向横向的方向上的运动。
28、优选地,在将飞行器控制表面从降低位置移动至升高位置时两个表面之间的接触点与在将飞行器控制表面从升高位置移动至降低位置时两个表面之间的接触点不同、并且优选地相反。优选地,接触点在与第一方向和/或第二方向平行的方向上彼此相对。
29、优选地,该方法包括允许沿着两个表面中的一个表面的滑动运动,以便允许两个表面之间在横向方向上的运动。
30、优选地,两个表面中的一个表面由联接机构的第一部分形成,并且两个表面中的另一表面由联接机构的第二部分形成,第一部分连接至凸轮本体,并且第二部分连接至致动器;使得由于联接机构的第一部分相对于联接机构的第二部分的运动,允许两个表面之间在横向方向上的运动,从而允许凸轮本体与致动器之间的横向运动。
31、优选地,两个表面包括第一表面和第二表面,其中,第一表面是凸起的或圆化的,并且第二表面是大致平坦的。
32、该飞行器优选地是载客飞行器。载客飞行器优选地包括乘客舱,该乘客舱包括用于容纳多个乘客的多行且多列的座椅单元。飞行器可以具有至少20个乘客、更优选地至少50个乘客、并且更优选地多于50个乘客的载客量。飞行器可以是商用飞行器、例如商用载客飞行器、例如单通道飞行器或双通道飞行器。
33、根据本发明的第六方面,还提供了一种联接装置,该联接装置适于用作本文中所述或所要求保护的联接器或联接机构,或者用于在本文中所述或所要求保护的将飞行器控制表面移动的方法中使用,例如以提供两个表面,这两个表面之间具有接触点。这种联接装置可以设置有上述凸轮本体或者不设置有上述凸轮本体。这种联接装置可以应用于将两个平行的移动本体的线性运动(两个平行的移动本体实际上可以不是完全平行并且很可能不是完全平行)耦合,使得存在单个约束方向的连结运动,以及多个(例如,5个)自由度的非约束(可能在限制范围内)运动,无论任一本体是否是凸轮本体。
34、当然将理解的是,关于本发明的一方面描述的特征可以被并入本发明的其他方面。例如,本发明的方法可以包含参考本发明的装置描述的任何特征,并且反之亦然。
本文地址:https://www.jishuxx.com/zhuanli/20240722/221276.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表