一种基于碎片位置预估的航天器安全轨道规划方法
- 国知局
- 2024-08-01 05:46:02
本发明属于航天科学,具体涉及一种基于碎片位置预估的航天器安全轨道规划方法。
背景技术:
1、随着航天器运行周期的延长,航天器耗尽使用寿命或无意中与其他空间目标发生碰撞,导致其解体并最终形成空间碎片的风险增大。这些碎片会严重在轨航天器的安全,有必要采取一定的措施避免碎片与航天器发生碰撞。
2、现有技术中,针对空间碎片严重威胁航天器安全运行的问题,传统通用的合网策略来捕获轨道上静止或翻滚的碎片,但该方法只能抓捕已经编目的空间碎片。此外,基于势函数和动态滑动流形的自适应反馈控制策略来规避威胁,但该方法运算复杂,航天器算力有限。
3、人工势场法(artificial potential field,apf)是一种常用的路径规划方法,尤其适用于动态环境下的航天器自主威胁规避问题。
4、在apf中,空间碎片被视为带有斥力场的威胁,而目标位置则产生吸引力场。航天器在这些势场的综合作用下,会沿着势能减小的方向移动,从而绕开碎片并朝目标前进。此方法的优势在于其简单性和直观性,使航天器能够在复杂动态的空间环境中,利用自身的传感器和计算资源,实现快速自主的规避决策。
技术实现思路
1、本发明的目的是提供一种基于碎片位置预估的航天器安全轨道规划方法,能够使航天器能够在复杂动态的空间环境中,利用自身的传感器和计算资源,实现快速自主的规避决策。
2、本发明采取的技术方案具体如下:
3、一种基于碎片位置预估的航天器安全轨道规划方法,包括以下步骤:
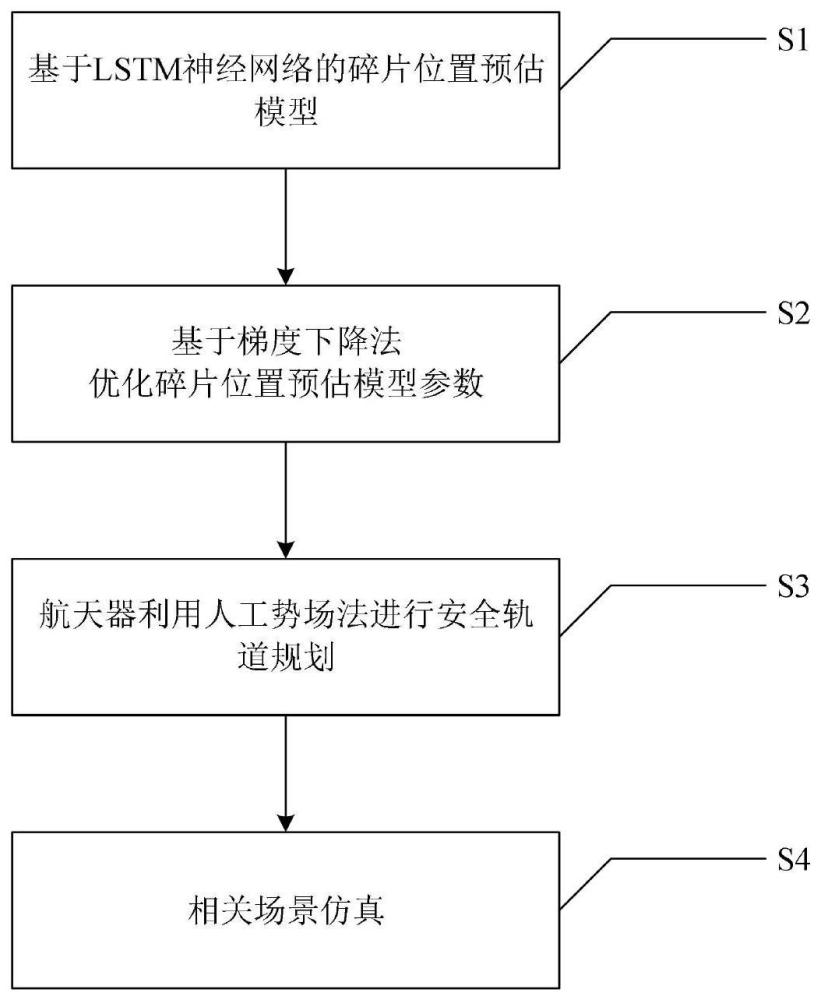
4、s1:基于lstm神经网络的碎片位置预估模型;
5、s2、基于梯度下降法优化碎片位置预估模型参数;
6、s3、航天器利用人工势场法进行安全轨道规划;
7、s4、相关场景仿真。
8、所述步骤s1中还设计用于碎片轨迹实时预测的lstm神经网络,所述lstm神经网络输入层、lstm层和输出层。
9、所述输入层,其用于接收碎片轨迹历史数据,如下:
10、x(t)=[rd(t-2p)rd(t-p)rd(t)]t (35)
11、其中,rd(t)表示t时刻碎片位置,rd(t-p)表示t-p时刻碎片位置,rd(t-2p)表示t-2p时刻碎片位置,p表示预测间隔。
12、所述lstm层,其由若干个lstm单元构成,每个lstm单元包括3个门控结构:输入门i、遗忘门f、输出门o和1个lstm单元状态c,它们的计算方式为:
13、i(t)=sig(wix(t)+rih(t-1)+bi) (36)
14、f(t)=sig(wfx(t)+rfh(t-1)+bf) (37)
15、o(t)=sig(wox(t)+roh(t-1)+bo) (38)
16、c(t)=tanh(wcx(t)+rch(t-1)+bc) (39)
17、其中,h(t-1)是lstm单元t-1时刻的输出,wi是输入门的输入矩阵,ri是输入门的循环矩阵,bi是输入门的偏置向量,wf是遗忘门的输入矩阵,rf是遗忘门的循环矩阵,bf是遗忘门的偏置向量,wo是输出门的输入矩阵,ro是输出门的循环矩阵,bo是输出门的偏置向量,wc是状态的输入矩阵,rc是状态的循环矩阵,bc是状态的偏置向量,
18、并且,sig和tanh均为门控函数,其表达式如下:
19、
20、
21、其中,exp=2.7183;
22、lstm单元t时刻的输出值为:
23、h(t)=tanh(c(t))⊙o(t) (42)
24、其中,⊙是hadamard乘积运算,c(t)是lstm单元t时刻的记忆向量,可以表示为:
25、c(t)=f(t)⊙c(t-1)+i(t)⊙c(t) (43)
26、其中,c(t-1)是lstm单元t-1时刻的记忆向量。
27、所述输出层,其是对lstm单元输出值的线性组合,即t+p时刻碎片预测位置
28、y(t)=wh(t) (44)
29、其中,w是输出权值。
30、所述步骤s2具体包括如下步骤:
31、计算lstm神经网络的损失函数l:
32、
33、更新lstm神经网络参数wi、ri、bi、wf、rf、bf、wo、ro、bo、wc、rc、bc、w基于梯度更新,l关于各参数的偏导数为:
34、
35、
36、
37、
38、
39、
40、
41、
42、
43、
44、
45、
46、
47、其中,t表示矩阵或向量的转置运算,1表示对应矩阵或向量运算的全1矩阵或向量。
48、所述步骤s3具体包括以下步骤:
49、m1:判断航天器需要规划安全轨道或不需要规划安全轨道;
50、m2:计算由既定轨道产生的吸引力势函数uatt(t),然后,执行所述步骤m4;
51、m3:航天器保持在既定轨道上,然后,执行所述步骤m4;
52、m4:令t=t+1,然后转至所述步骤m1。
53、所述步骤m1中还包括以下步骤:
54、
55、其中,p是常数,且如下:
56、
57、d(t)=||rs(t)-rd(t)|| (61)
58、其中,min(·)表示取小运算,rs(t)表示t时刻航天器位置,d(t)表示t时刻航天器与碎片相对距离,||·||是取二范数运算,表示t+p时刻航天器与碎片预测的相对距离,根据公式(35)-(44)计算;
59、在此之前,根据公式(45)-(58)更新lstm神经网络相关参数;
60、若满足规划条件dmin(t)≤p,则执行所述步骤m2;或不满足规划条件dmin(t)≤p,则执行所述步骤m3。
61、所述吸引力势函数uatt(t),如下:
62、
63、其中,ds(t)=||rs(t)-r(t)||表示t时刻航天器实际位置与既定轨道的距离,r(t)是t时刻航天器既定轨道的位置,ab是吸引力过渡区的阈值,α是吸引力系数,具体表示为:
64、
65、其中,β∈(0,1);
66、计算吸引力势函数的梯度▽uatt(t),如下:
67、
68、并且,计算由碎片产生的排斥力势函数urep(t),如下:
69、
70、其中,d(t)=||rs(t)-rd(t)||表示t时刻航天器实际位置与碎片的距离,rb是排斥力过渡区的阈值,γ是排斥力系数;
71、计算排斥力势函数的梯度如下:
72、
73、则规划后的航天器位置为rs(t+1),如下:
74、
75、然后,执行所述步骤m4。
76、步骤m3中航天器保持在既定轨道上后,规划后的航天器位置为rs(t+1),如下:
77、rs(t+1)=r(t+1) (68)
78、然后,执行所述步骤m4。
79、本发明取得的技术效果为:
80、本发明的一种基于碎片位置预估的航天器安全轨道规划方法,设计了基于lstm(长短期记忆)神经网络的碎片轨迹预测模型,定义了“主动回避边界”作为执行规避动作的关键决策参数,并在人工势场法的框架下提出了一种改进的分段吸引系数,以优化航天器的转移轨迹,使转移轨道更加平滑,实现了航天器面临碎片威胁时在线规划转移轨道。
81、本发明的一种基于碎片位置预估的航天器安全轨道规划方法,该方法能够为航天器提供更充足的规避时间,减少不必要的大规模规避碎片动作,减轻在轨执行压力。
82、本发明的一种基于碎片位置预估的航天器安全轨道规划方法,需根据公式(45)-(58)更新lstm神经网络相关参数,具备自我调节效果,实时纠正,减少偏差。
83、本发明的一种基于碎片位置预估的航天器安全轨道规划方法,应用本发明方法得到的安全轨道以及航天器与碎片的相对距离,计算简便,能够节约航天器的运算力。
本文地址:https://www.jishuxx.com/zhuanli/20240722/221320.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表