一种仿鸟扑翼机及其扑翼和使用方法
- 国知局
- 2024-08-01 05:46:21
本发明涉及扑翼机,具体涉及一种仿鸟扑翼机及其扑翼和使用方法。
背景技术:
1、飞行生物在飞行过程中有着多种复杂的扑翼运动方式,归纳起来有四种基本的运动方式:扑动(flapping)、扭转(twisting)、挥摆(swinging)以及折叠(folding),其中,扑动运动是绕与飞行方向相同的轴做上下运动的拍动,可为飞行提供升力;扭转是绕翅翼中线的旋转运动;挥摆是绕与机身垂直轴的前后滑动;折叠是翅膀沿翼展方向的伸展和弯曲。鸟类飞行过程中涉及到的运动方式为多维度空间内复杂的组合运动,而并非单一的上下扑动。鸟类从静止状态到飞行再到降落状态的完整飞行过程中,需要翅膀的旋转运动、扑动运动与收缩运动相互配合,才能实现飞行。
2、但是,现有扑翼机只能实现单一维度的运动,气动效率较低,要实现鸟类翅膀的多自由度运动,需要一种备多维度空间内组合运动的能力的扑翼。
技术实现思路
1、本发明提供了一种仿鸟扑翼机及其扑翼和使用方法,该扑翼通过增加运动自由度使运动从平面拓展到空间维度,各运动功能之间既可以分别独立运行,也可以通过相互配合实现起飞、飞行、悬停、快速飞行、翱翔、跃飞及降落等鸟类基本运动,仿生度极高,有效提高气动效率和飞行稳定性,从而提升扑翼机的能源利用效率和续航能力。
2、本发明采用以下具体技术方案:
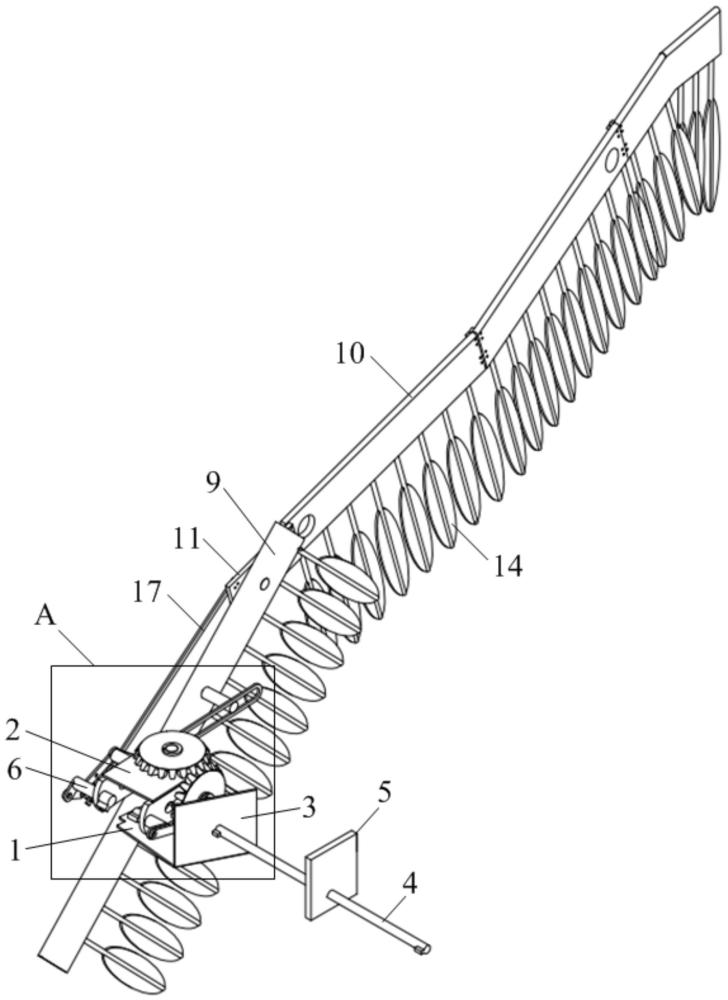
3、本发明提供了一种用于仿鸟扑翼机的扑翼,该扑翼包括底座、机架、驱动电机、收缩舵机、扑翼收缩机构、扑动机构、侧板、旋转传动杆、连接板以及控制器;
4、所述机架能够绕竖直轴线转动地安装于所述底座的顶部;所述驱动电机和所述收缩舵机均固定安装于所述机架内部;所述驱动电机与所述扑动机构传动连接,用于实现所述机架相对所述底座的摆动从而实现扑翼的扑动;所述收缩舵机与所述扑翼收缩机构传动连接,用于实现扑翼的收缩;
5、所述侧板沿竖直方向设置,底端固定安装于所述底座且位于所述机架的一侧;
6、所述旋转传动杆沿水平方向延伸,一端固定连接于所述侧板,另一端用于固定连接于仿鸟扑翼机的机身内的旋转舵机,中部穿过所述连接板;所述连接板用于固定连接于所述机身,并对所述旋转传动杆进行转动支承;所述旋转舵机用于驱动所述旋转传动杆转动,以通过所述侧板、所述底座和所述机架实现扑翼绕所述旋转传动杆的轴心线转动;
7、所述控制器与所述驱动电机、所述收缩舵机以及所述旋转舵机信号连接,用于控制所述驱动电机、所述收缩舵机以及所述旋转舵机运转。
8、更进一步地,所述扑翼收缩机构包括收缩传动杆、收缩连杆、v形摇杆、中段扑翼、外段扑翼、扑翼连接器、收缩滑动杆、滑轨以及人工羽毛;
9、所述收缩传动杆穿过所述机架,一端与所述收缩舵机连接,另一端设置有收缩曲柄;所述收缩曲柄、所述收缩连杆、所述v形摇杆、所述中段扑翼以及所述扑翼连接器依次转动连接;
10、所述滑轨采用悬臂结构,内端部固定连接于所述机架的侧面,外端部朝向背离所述收缩曲柄的方向延伸;所述滑轨具有沿水平方向延伸的滑槽;
11、所述v形摇杆的中部折弯处通过固定杆转动安装于所述机架;
12、所述收缩滑动杆滑动配合地安装于所述滑轨的滑槽内,并与所述中段扑翼转动连接;所述收缩舵机通过所述收缩传动杆、所述收缩曲柄和所述收缩连杆驱动所述v形摇杆作往复摆动,从而带动所述中段扑翼完成收缩-展开运动;
13、所述外段扑翼固定连接于所述扑翼连接器背离所述中段扑翼的一端;
14、所述中段扑翼和所述外段扑翼的底端均匀分布有所述人工羽毛。
15、更进一步地,所述扑翼收缩机构还包括连接器延伸杆和扑翼曲柄;
16、所述连接器延伸杆的一端转动连接于所述扑翼连接器,另一端与所述扑翼曲柄的一端转动连接;
17、所述扑翼曲柄的另一端转动连接于所述v形摇杆。
18、更进一步地,所述扑动机构包括固定锥齿轮、结构固定杆、从动锥齿轮、姿态转换传动杆、姿态转换连杆以及姿态转换摇杆;
19、所述结构固定杆沿竖直方向设置,底端固定安装于所述底座的顶面,顶端固定安装有所述固定锥齿轮,中部贯穿所述机架设置;
20、所述从动锥齿轮能够转动地安装于所述机架朝向所述侧板的一侧,并与所述固定锥齿轮啮合;
21、所述姿态转换传动杆穿过所述机架,一端与所述驱动电机连接,另一端设置有姿态转换曲柄;
22、所述姿态转换曲柄、所述姿态转换连杆以及所述姿态转换摇杆依次转动连接;
23、所述姿态转换摇杆的另一端与所述从动锥齿轮同轴固定连接。
24、更进一步地,所述固定锥齿轮与所述从动锥齿轮的模数、齿数均相同。
25、更进一步地,所述固定锥齿轮与所述从动锥齿轮利用尼龙及玻璃纤维通过3d打印工艺制成。
26、更进一步地,所述外段扑翼为分段结构,包括依次连接的第一外段扑翼、第二外段扑翼以及第三外段扑翼;
27、所述第一外段扑翼背离所述第二外段扑翼的一端固定连接于所述扑翼连接器;
28、在所述第一外段扑翼、所述第二外段扑翼以及所述第三外段扑翼的底端均固定安装有所述人工羽毛。
29、更进一步地,所述机架为u型结构,顶部固定连接有顶盖;
30、所述结构固定杆穿过所述顶盖。
31、同时,本发明还提供了一种仿鸟扑翼机,该仿鸟扑翼机包括上述技术方案中提供的任意一种扑翼。
32、另外,本发明还提供了一种上述技术方案中提供的任意一种扑翼的使用方法,该使用方法包括以下步骤:
33、步骤一,控制器接受到扑翼旋转指令时,控制旋转舵机转动并驱动旋转传动杆绕其自身的轴心线转动,使扑翼由与仿鸟扑翼机的机身平行的姿态逐渐转变为与机身垂直的姿态;
34、步骤二,控制器接受到扑动指令时,控制驱动电机转动并将动力依次通过姿态转换传动杆、姿态转换曲柄、姿态转换连杆以及姿态转换摇杆传输至从动锥齿轮,从动锥齿轮与固定安装于结构固定杆的固定锥齿轮啮合,使从动锥齿轮进行往复转动,实现底座、机架以及扑翼收缩机构在水平面内的左右往复转动;
35、步骤三,控制器接受到扑翼收缩指令时,收缩传动杆在收缩舵机的驱动下运动,收缩传动杆的收缩曲柄、收缩连杆以及v形摇杆组成连杆机构,v形摇杆绕中部做往复运动,v形摇杆的右端部与中段扑翼左端部连接,中段扑翼的中部转动连接有收缩滑动杆,当中段扑翼受到牵引开始运动时,收缩滑动杆在滑轨的滑槽中滑动,确保中段扑翼完成伸展-收缩的往复运动;
36、步骤四,扑翼收缩过程中,外段扑翼的左端固定连接扑翼连接器,连接器延伸杆和扑翼曲柄组成连杆机构,当v形摇杆运动时,与v形摇杆连接的扑翼曲柄随之运动,同时通过连接器延伸杆和扑翼连接器带动外段扑翼做往复运动;
37、步骤五,控制器接收到复合运动控制指令时,控制驱动电机、收缩舵机和旋转舵机同时运动,实现各项运动功能的组合,实现起飞、滑翔或者降落功能。
38、有益效果:
39、本发明的扑翼用于实现仿鸟扑翼机的飞行,通过连接板固定连接于仿鸟扑翼机的机身,在机身内安装有旋转舵机,旋转舵机通过旋转传动杆驱动扑翼以旋转传动杆为旋转轴转动;驱动电机与扑动机构传动连接,用于驱动扑动机构实现扑翼在水平面内的摆动,从而完成扑动动作;收缩舵机与扑翼收缩机构传动连接,能够实现扑翼的收缩和展开;上述扑翼能够通过控制器控制驱动电机、伸缩舵机和旋转舵机的单独运转或同时运动形成配合,完成仿鸟姿态运动,实现高自由度运动,通过扑翼收缩机构能够实现翅膀与飞行状态的配合,从而降低飞行阻力;因此,上述扑翼采用电机和舵机相互配合通过增加运动自由度使运动从平面拓展到空间维度,各运动功能之间既可以分别独立运行,也可以通过相互配合实现起飞、飞行、悬停、快速飞行、翱翔、跃飞及降落等鸟类基本运动,仿生度极高,有效提高扑翼机的气动效率和飞行稳定性,从而提升扑翼机的能源利用效率和续航能力。
本文地址:https://www.jishuxx.com/zhuanli/20240722/221360.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表