一种易于控制的四轴八旋翼无人机
- 国知局
- 2024-08-01 05:52:46
本发明涉及无人机控制,尤其涉及一种易于控制的四轴八旋翼无人机。
背景技术:
1、无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。民用方面,无人机+行业应用,是无人机真正的刚需;在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途。
2、四轴八旋翼是一种具有多个正迎角旋翼来产生升力,并且按照不同方向转动来克服反扭力的特种无人机,由于多个旋翼向不同方向转动,这样在空中能够近乎实现悬停的功能,同时采用八旋翼的结构,能够实现快速飞行的效果,部分四轴八旋翼无人机百公里加速能达到3s至6s,这样快速的飞行带来的是飞行时间短,通常一次飞行仅能持续10min至20min,且由于速度过快,在设定好飞行方向后,较难快速实现转向、俯冲或者仰飞不易控制。
3、随着fpv技术的发展,通过摄像头等图像采集设备能够快速将图像信息传递至终端,使得人工远程操控四轴八旋翼无人机执行目标追踪、目标区域巡航成为可能,但是由于四轴八旋翼无人机自身的缺陷,在硬件上依然缺少使其易于控制的部件。
技术实现思路
1、为了弥补以上不足,本发明提供了一种易于控制的四轴八旋翼无人机。
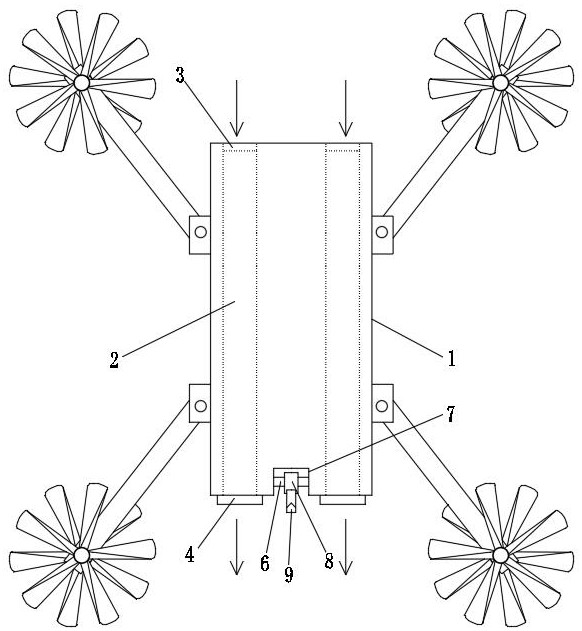
2、为了实现上述目的,本发明采用了如下技术方案:一种易于控制的四轴八旋翼无人机,包括无人机基座,所述无人机基座两侧设置有四轴八旋翼,无人机基座下方设置有挂仓钩,其中所述无人机基座内设置有气流导向机构、压电振动模组和工作模块,无人机基座尾部设置有可调节尾翼机构;
3、所述气流导向机构的进气口设于无人机基座一端,气流导向机构的出气口设于无人机基座另一端;
4、所述压电振动模组设于气流导向机构内,且压电振动模组能辅助调节无人机俯冲和仰飞;
5、所述可调节尾翼机构能调节无人机能辅助调节无人机转向;
6、所述工作模块包括图像采集模块、控制器和无线传输模块,所述控制器分别与图像采集模块和无线传输模块信号连接,且控制器能控制压电振动模组和可调节尾翼机构工作;
7、所述图像采集模块能采集无人机飞行图像信息,并将图像信息传递至控制器;
8、所述无线传输模块能将控制器与终端进行信号连接。
9、进一步的,沿无人机飞行方向所述气流导向机构的进气口设于无人机基座头部,气流导向机构的出气口设于无人机基座尾部。
10、进一步的,气流导向机构包括气流通道、斜向上通道和斜向下通道;
11、所述气流通道一端与气流导向机构的进气口连通,气流通道另一端分别与斜向上通道和斜向下通道连通;
12、所述斜向上通道另一端与无人机基座尾部的第一出气口连通;
13、所述斜向下通道另一端与无人机基座尾部的第二出气口连通。
14、进一步的,压电振动模组设于气流通道与斜向上通道和斜向下通道连通处,且能改变流入斜向上通道和斜向下通道的气流量。
15、进一步的,压电振动模组内设置有上气腔、压电振动薄膜和下气腔;
16、所述上气腔将气流通道和斜向上通道连通;
17、所述下气腔将气流通道和斜向下通道连通;
18、所述压电振动薄膜设于上气腔和下气腔间,且压电振动薄膜在压电开关作用下能改变上气腔和下气腔中气流大小。
19、进一步的,压电振动薄膜上表面覆盖有上弹性振膜,压电振动薄膜下表面覆盖有下弹性振膜;
20、所述上弹性振膜能与上气腔内壁接触;
21、所述下弹性振膜能与下气腔内壁接触。
22、可选的,压电振动模组内设置有上气腔、第一压电振动薄膜、第二压电振动薄膜和下气腔;
23、所述上气腔将气流通道和斜向上通道连通;
24、所述下气腔将气流通道和斜向下通道连通;
25、所述第一压电振动薄膜和第二压电振动薄膜设于上气腔和下气腔间,且第一压电振动薄膜和第二压电振动薄膜分别由两组压电开关控制,第一压电振动薄膜能改变上气腔中气流大小,所述第二压电振动薄膜能改变下气腔中气流大小。
26、可选的,第一压电振动薄膜上表面覆盖有上弹性振膜,第二压电振动薄膜下表面覆盖有下弹性振膜;
27、所述上弹性振膜能与上气腔内壁接触;
28、所述下弹性振膜能与下气腔内壁接触。
29、进一步的,可调节尾翼机构包括连接杆、夹板、压电片和压电尾翼;
30、所述无人机基座尾部设置有凹槽;
31、所述连接杆设于凹槽内,且连接杆两端分别与凹槽内壁连接;
32、所述夹板设于连接杆上,且所述压电片安装在夹板远离连接杆的一端上,压电片对压电尾翼夹持。
33、可选的,控制无人机飞行,包括以下步骤:
34、s1.图像采集模块采集无人机飞行图像信息,并将图像信息传递至控制器;
35、s2.控制器将图像信息经由无线传输模块传递至终端;
36、s3.终端通过无线传输模块对控制器发出指令;
37、s4.控制器基于接收的指令,控制压电振动模组和/或可调节尾翼机构工作,调整无人机飞行方向。
38、本发明具有如下有益效果:
39、1、通过设置的工作模块组成实现fpv功能的最简易单元,能够实时传输无人机飞行图像信息,并且通过控制器对无人机飞行方向进行快速控制。
40、2、通过设置气流通道、斜向上通道和斜向下通道,并且搭配压电振动模组,在需要进行俯冲和仰飞时,通过压电振动模组快速改变穿过无人机基座内气流的方向,实现快速换向。
41、3、通过控制器控制可调节尾翼机构,能够改变从无人机基座表面掠过的气流,使得其快速的向左或者向右转向。
42、4、解决了现有四轴八旋翼无人机由于速度过快,在设定好飞行方向后,较难快速实现转向、俯冲或者仰飞不易控制的问题。
技术特征:1.一种易于控制的四轴八旋翼无人机,包括无人机基座(1),所述无人机基座(1)两侧设置有四轴八旋翼,无人机基座(1)下方设置有挂仓钩(10),其特征在于:所述无人机基座(1)内设置有气流导向机构、压电振动模组(14)和工作模块,无人机基座(1)尾部设置有可调节尾翼机构;
2.根据权利要求1所述的一种易于控制的四轴八旋翼无人机,其特征在于:沿无人机飞行方向所述气流导向机构的进气口(3)设于无人机基座(1)头部,气流导向机构的出气口设于无人机基座(1)尾部。
3.根据权利要求1所述的一种易于控制的四轴八旋翼无人机,其特征在于:所述气流导向机构包括气流通道(2)、斜向上通道(15)和斜向下通道(16);
4.根据权利要求3所述的一种易于控制的四轴八旋翼无人机,其特征在于:所述压电振动模组(14)设于气流通道(2)与斜向上通道(15)和斜向下通道(16)连通处,且能改变流入斜向上通道(15)和斜向下通道(16)的气流量。
5.根据权利要求4所述的一种易于控制的四轴八旋翼无人机,其特征在于:所述压电振动模组(14)内设置有上气腔(17)、压电振动薄膜(19)和下气腔(18);
6.根据权利要求5所述的一种易于控制的四轴八旋翼无人机,其特征在于:所述压电振动薄膜(19)上表面覆盖有上弹性振膜(20),压电振动薄膜(19)下表面覆盖有下弹性振膜(21);
7.根据权利要求4所述的一种易于控制的四轴八旋翼无人机,其特征在于:所述压电振动模组(14)内设置有上气腔(17)、第一压电振动薄膜(25)、第二压电振动薄膜(22)和下气腔(18);
8.根据权利要求7所述的一种易于控制的四轴八旋翼无人机,其特征在于:所述第一压电振动薄膜(25)上表面覆盖有上弹性振膜(20),第二压电振动薄膜(22)下表面覆盖有下弹性振膜(21);
9.根据权利要求6或8所述的一种易于控制的四轴八旋翼无人机,其特征在于:所述可调节尾翼机构包括连接杆(6)、夹板(8)、压电片(23)和压电尾翼(9);
10.根据权利要求9所述的一种易于控制的四轴八旋翼无人机,其特征在于:控制无人机飞行,包括以下步骤:
技术总结本发明涉及无人机控制技术领域,公开了一种易于控制的四轴八旋翼无人机,包括无人机基座,无人机基座两侧设置有四轴八旋翼,无人机基座下方设置有挂仓钩,其中无人机基座内设置有气流导向机构、压电振动模组和工作模块,无人机基座尾部设置有可调节尾翼机构;气流导向机构的进气口设于无人机基座一端,气流导向机构的出气口设于无人机基座另一端;压电振动模组设于气流导向机构内,压电振动模组能辅助调节无人机俯冲和仰飞;可调节尾翼机构能调节无人机能辅助调节无人机转向,通过设置气流通道、斜向上通道和斜向下通道,并且搭配压电振动模组,在需要进行俯冲和仰飞时,通过压电振动模组快速改变穿过无人机基座内气流的方向,实现快速换向。技术研发人员:彭亚娜受保护的技术使用者:成都航空职业技术学院技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240722/221860.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表