一种可堆叠式无人机集群发射系统及控制方法与流程
- 国知局
- 2024-08-01 06:00:38
本发明涉及一种无人机集群发射系统,具体涉及一种可堆叠式无人机集群发射系统及控制方法。
背景技术:
1、多架无人机以无人机集群的形式协同完成任务是未来无人机的发展方向。发展无人机集群首要解决的问题就是如何实现多架无人机的运输、快速发射以及回收。通常将多架无人机集中装载在一个可堆叠式无人机集群发射箱内,然后将可堆叠式无人机集群发射箱装载于运输车辆或其他运输平台上。
2、中国专利申请cn218777707u公开了一种多旋翼无人机以及用于放置多架该多旋翼无人机的发射箱,该专利中的多架多旋翼无人机为堆叠放置于所述发射箱内,单次只能发射最上方的一架多旋翼无人机,当需要将该专利中的多架多旋翼无人机从发射箱中发射升空时,需在将无人机放入发射箱前记录堆叠顺序,发射时根据记录的堆叠顺序由上至下逐一发射多架无人机升空,一旦所记录的堆叠顺序出现错误,向不在可堆叠式无人机集群发射箱最上方的无人机发送了“发射”指令,将会导致发射失败或发射事故。
技术实现思路
1、发明目的:本发明的第一方面所要解决的技术问题是针对现有技术的不足,提供一种可堆叠式无人机集群发射系统,该系统每次发射前无需记录堆叠顺序,可简化发射多架无人机的发射流程,并避免发射失败或发射事故。
2、为了解决上述技术问题,本发明公开了一种可堆叠式无人机集群发射系统,该系统包括:
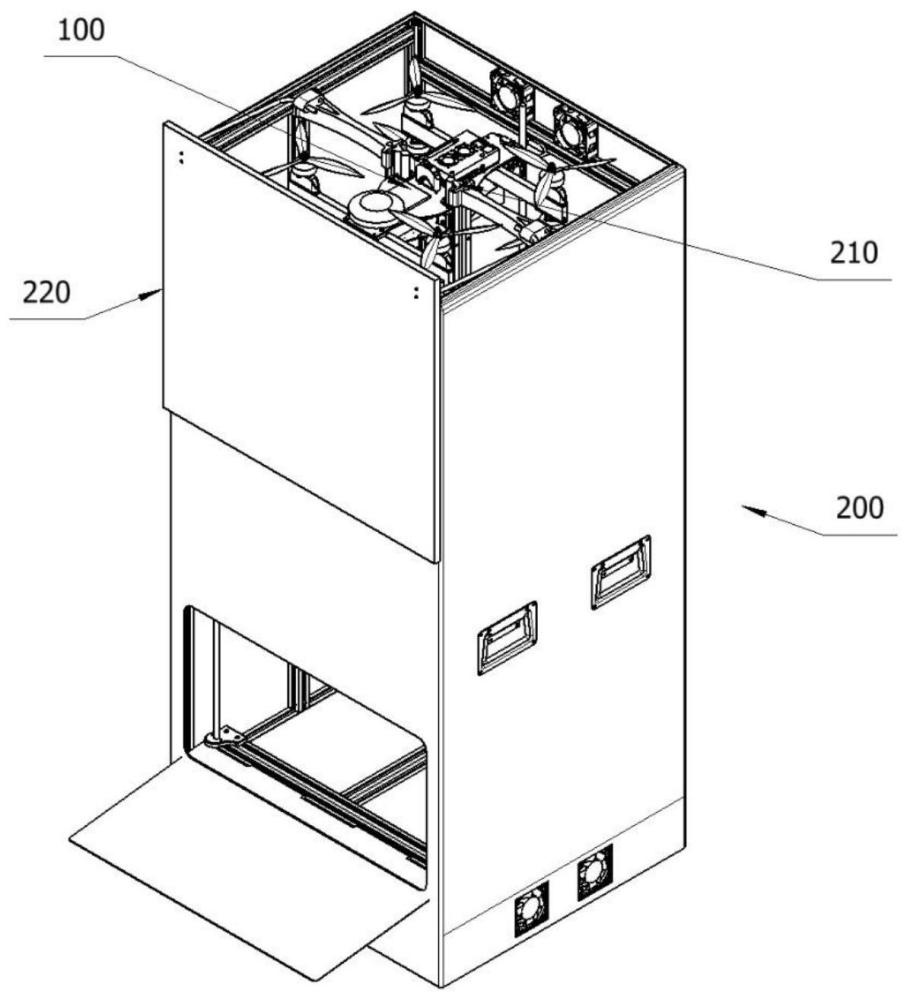
3、可堆叠式无人机集群发射箱;
4、堆叠放置于所述可堆叠式无人机集群发射箱内的若干可堆叠式无人机,各所述可堆叠式无人机分别安装有传感器,所述可堆叠式无人机通过对应的传感器信号判断其是否能够飞离所述可堆叠式无人机集群发射箱。
5、进一步的,该系统还包括地面站,各所述可堆叠式无人机均能够与所述地面站双向通信。
6、进一步的,各未发射的所述可堆叠式无人机能够根据相应的传感器信号实时更新自身状态,以确保只有上方不存在障碍物的未发射的所述可堆叠式无人机处于就绪状态;所述地面站能够接收各所述可堆叠式无人机向所述地面站实时反馈的状态信息,并仅向处于就绪状态的所述可堆叠式无人机下达发射命令,从而使该可堆叠式无人机飞离所述可堆叠式无人机集群发射箱。
7、具体的,所述可堆叠式无人机的状态包括飞行中状态和锁定状态;若所述可堆叠式无人机接收来自所述地面站的发射命令发射升空,则更新自身状态为飞行中状态;若未发射的所述可堆叠式无人机利用相应的传感器未检测到所述障碍物,则该可堆叠式无人机更新自身状态为就绪状态,否则,更新自身状态为锁定状态。
8、具体的,所述可堆叠式无人机及所述地面站均包括通信装置,所述可堆叠式无人机和所述地面站能够通过所述通信装置建立双向通信。
9、具体的,各所述可堆叠式无人机与所述地面站之间建立双向通信后,若处于锁定状态的所述可堆叠式无人机收到所述地面站下达的发射命令,该可堆叠式无人机则不执行发射命令,并向所述地面站上报警告信息,所述地面站能够接收所述警告信息。
10、具体地,所述可堆叠式无人机为多旋翼无人机。
11、可选的,所述传感器为微动开关,所述可堆叠式无人机通过其内微动开关电路的通断来判断其是否能够飞离所述可堆叠式无人机集群发射箱。
12、本发明的第二方面提供了一种可堆叠式无人机集群发射系统的控制方法,该控制方法包括以下步骤:
13、步骤403、使各可堆叠式无人机均实时更新自身状态信息;各可堆叠式无人机的状态包括飞行中状态、就绪状态和锁定状态;各所述可堆叠式无人机在任一状态下均能够与地面站建立双向通信;
14、步骤404、各可堆叠式无人机均与地面站建立双向通信并向地面站反馈状态信息;
15、步骤405、所述地面站接收各可堆叠式无人机反馈的状态信息,并将状态信息反馈给操作人员;
16、步骤406、使地面站接收发射n架无人机的任务指令;
17、步骤407、地面站仅向处于就绪状态的所述可堆叠式无人机下达发射命令;
18、步骤408、处于就绪状态的所述可堆叠式无人机接收到所述发射命令后自主飞离可堆叠式无人机集群发射箱,并更新其状态为飞行中状态,同时向所述地面站上报更新后的状态;
19、步骤409、所述地面站接收到成功发射的所述可堆叠式无人机的飞行中状态,视为成功发射1架可堆叠式无人机;
20、步骤410、判断是否成功发射n架无人机;若否,重复步骤407至步骤409,直至成功发射n架无人机。
21、进一步地,该控制方法还包括:步骤411、向操作人员反馈成功发射n架无人机的信息;
22、在步骤410中,若是,则转向步骤411。
23、有益效果:
24、(1)在每架无人机上设置能够检测其上方是否存在未发射的无人机的传感器,使得单个可堆叠式无人机集群发射箱内同一时刻只有最上面一架无人机处于就绪状态,使得每次发射前无需记录各无人机在可堆叠式无人机集群发射箱内的堆叠顺序,即可实现多架无人机按堆叠顺序自上而下自主飞离集群发射箱,简化了发射多架无人机的发射流程。
25、(2)在每架无人机上设置能够检测其上方是否存在阻止其发射的障碍物例如未发射的无人机的传感器,使得每架无人机检测到其上方存在未发射的无人机时,不执行地面站发送的发射命令,从而避免了因地面站将发射命令错误发送给处于锁定状态的无人机而导致的发射失败或发射事故。导致发射命令错误发送的原因包括系统缺陷、通信数据出错以及操作失误。
技术特征:1.一种可堆叠式无人机集群发射系统,其特征在于,包括:
2.根据权利要求1所述的一种可堆叠式无人机集群发射系统,其特征在于,该系统还包括地面站(300),各所述可堆叠式无人机(100)均能够与所述地面站(300)双向通信。
3.根据权利要求2所述的一种可堆叠式无人机集群发射系统,其特征在于,各未发射的所述可堆叠式无人机(100)能够根据相应的传感器(110)信号实时更新自身状态,以确保只有上方不存在障碍物的未发射的所述可堆叠式无人机(100)处于就绪状态;所述地面站(300)能够接收各所述可堆叠式无人机(100)向所述地面站(300)实时反馈的状态信息,并仅向处于就绪状态的所述可堆叠式无人机(100)下达发射命令,从而使该可堆叠式无人机(100)飞离所述可堆叠式无人机集群发射箱(200)。
4.根据权利要求3所述的一种可堆叠式无人机集群发射系统,其特征在于,所述可堆叠式无人机(100)的状态包括飞行中状态和锁定状态;若所述可堆叠式无人机(100)接收来自所述地面站(300)的发射命令发射升空,则更新自身状态为飞行中状态;若未发射的所述可堆叠式无人机(100)利用相应的传感器(110)未检测到所述障碍物,则该可堆叠式无人机(100)更新自身状态为就绪状态,否则,更新自身状态为锁定状态。
5.根据权利要求4所述的一种可堆叠式无人机集群发射系统,其特征在于,所述可堆叠式无人机(100)及所述地面站(300)均包括通信装置,所述可堆叠式无人机(100)和所述地面站(300)能够通过所述通信装置建立双向通信。
6.根据权利要求5所述的一种可堆叠式无人机集群发射系统,其特征在于,各所述可堆叠式无人机(100)与所述地面站(300)之间建立双向通信后,若处于锁定状态的所述可堆叠式无人机(100)收到所述地面站(300)下达的发射命令,该可堆叠式无人机(100)则不执行发射命令,并向所述地面站(300)上报警告信息,所述地面站(300)能够接收所述警告信息。
7.根据权利要求1至6中任意一项所述的一种可堆叠式无人机集群发射系统,其特征在于,所述可堆叠式无人机(100)为多旋翼无人机。
8.根据权利要求1至6中任意一项所述的一种可堆叠式无人机集群发射系统,其特征在于,所述传感器(110)为微动开关,所述可堆叠式无人机(100)通过其内微动开关电路的通断来判断其是否能够飞离所述可堆叠式无人机集群发射箱(200)。
9.一种可堆叠式无人机集群发射系统的控制方法,其特征在于,包括以下步骤:
10.根据权利要求9所述的一种可堆叠式无人机集群发射系统的控制方法,其特征在于,该控制方法还包括:步骤411、向操作人员反馈成功发射n架无人机的信息;
技术总结本发明公开了一种可堆叠式无人机集群发射系统及控制方法,其中,该系统包括:可堆叠式无人机集群发射箱;堆叠放置于所述可堆叠式无人机集群发射箱内的若干可堆叠式无人机,各所述可堆叠式无人机分别安装有传感器,所述可堆叠式无人机通过对应的传感器信号判断其是否能够飞离所述可堆叠式无人机集群发射箱。本发明无需预先记录多架无人机在发射装置中的堆叠顺序,即可实现多架无人机按堆叠顺序自上而下自主飞离发射装置。技术研发人员:陈云海,陈仙云,王森,沈琪,申良喜,樊小龙,孙裔申,朱澄澄,张巍巍,戚若宇,信莹莹受保护的技术使用者:中国电子科技集团公司第二十八研究所技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/222394.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。