一种陆空两栖无人机的空地切换方法、系统及无人机
- 国知局
- 2024-08-01 06:02:36
本申请涉及无人机,尤其涉及一种陆空两栖无人机的空地切换方法、系统及无人机。
背景技术:
1、无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。无人驾驶飞机分为无人固定翼机、无人垂直起降机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等。
2、随着陆空两栖无人机在各个领域的不断应用,现有的空地两栖机器人在空中飞行和地面行驶两个模式切换时可分为变结构和固定结构两类。
3、变结构方面:一种名为mtabot的新型可变形陆空机器人,其空地模式转换需要改变机器人的构型来分别支持空中模式和地面模式的运动。地面模式下通过电机驱动的主动轮实现在地面上的运动,空中模式下从可变形两轮构型转换至双旋翼构型。北京航空航天大学设计的可展开的双旋翼球,通过折展机构实现旋翼的展开,赋予了机器人空地两栖运动能力,但是同样存在机构复杂,空地模式切换慢等问题。
4、固定结构方面:固定结构空地两用机器人,旋翼与车轮底盘相结合,地面行驶方面,和传统的车辆相似,空中飞行则启动旋翼,利用旋翼实现飞行。
5、现有的陆空两栖无人机空地模式切换通常需要额外的机械机构及动力,使其空地运动模式切换缓慢,空中控制复杂度高,飞行稳定性低,地面模式运动稳定性弱,对控制算法依赖性强。
6、于此,有必要提出一种新的技术方案,以克服现有技术中存在的问题。
技术实现思路
1、本申请提供一种陆空两栖无人机的空地切换方法,以解决现有技术存在的陆空两栖无人机空地模式切换通常需要额外的机械机构及动力,使其空地运动模式切换缓慢,空中控制复杂度高,飞行稳定性低,地面模式运动稳定性弱,对控制算法依赖性强的问题。
2、本申请采用如下技术方案:一种陆空两栖无人机的空地切换方法,包括:
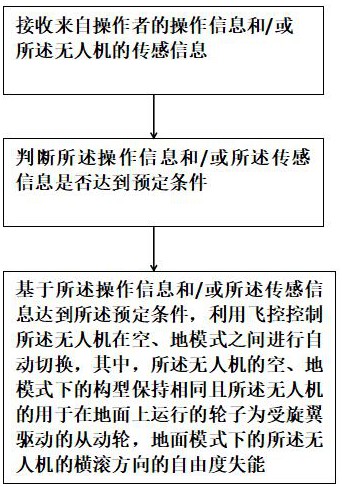
3、接收来自操作者的操作信息和/或所述无人机的传感信息;
4、判断所述操作信息和/或所述传感信息是否达到预定条件;
5、基于所述操作信息和/或所述传感信息达到所述预定条件,利用飞控控制所述无人机在空、地模式之间进行切换,其中,所述无人机的空、地模式下的构型保持相同且所述无人机的用于在地面上运行的轮子为受旋翼驱动的从动轮,地面模式下的所述无人机的横滚方向的自由度失能。
6、进一步地,所述传感信息包括无人机的垂直和/或水平方向的速度、距地面的高度和/或无人机的动力值。
7、进一步地,所述判断所述传感信息是否达到预定条件包括:判断所述无人机的垂直和/或水平方向的速度是否达到预定值;判断所述无人机的对地高度是否达到设定值;判断油门档位是否达到预定档位;和/或油门变化是否小于预定值。
8、进一步地,对所述无人机的地面模式进行控制的模型包括:位置动力学模型、姿态动力学模型以及飞行器的姿态运动学模型。
9、进一步地,所述位置动力学模型包括:
10、
11、其中,=0, φ=0,满足约束, , ,分别表示无人机沿 x、y、z轴的加速度; φ, θ, ψ分别表示无人机绕 x、y、z 轴旋转的俯仰角; f表示无人机受到的旋翼向上升力的合力;m表示无人机的质量;vx,vy,vz分别表示无人机沿 x、y、z轴的速度。
12、进一步地,所述姿态动力学模型包括:
13、
14、 其中,, p,q,r分别是在 x,y,z轴方向的角速度分量;,表示螺旋桨在机体轴上产生的力矩; ,分别表示绕 y,z轴的转动惯量;, , 分别表示无人机沿x,y,z轴方向的角加速度。
15、进一步地,所述姿态运动学模型包括:
16、
17、其中, φ=0,, ,表示无人机的姿态; φ, θ, ψ分别表示无人机绕 x、y、z 轴旋转的俯仰角; q,r分别是在 y,z轴方向的角速度分量。
18、进一步地,所述无人机的旋翼与所述无人机的从动轮联动,通过调节旋翼的转速来使所述无人机在地面上前进、后退以及偏航。
19、进一步地,通过调节旋翼的转速来使所述无人机在地面上前进、后退包括:调节四个旋翼的前方两个旋翼的相对于后方两个旋翼的转速,使前方两个旋翼的转速与后方两个旋翼的转速之间产生转速差;
20、通过调节旋翼的转速来使所述无人机在地面上偏航包括:通过使呈对角布置且旋转方向相同的一对电机的转速与呈对角布置且旋转方向相同的另一对电机的转速之间产生转速差,其中,所述一对电机的旋转方向与所述另一对电机的旋转方向相反。
21、本申请采用如下技术方案:一种陆空两栖无人机的空地切换系统,包括:
22、接收模块,用于接收来自操作者的操作信息和/或所述无人机的传感信息;
23、判断模块,用于判断所述操作信息和/或所述传感信息是否达到预定条件;
24、空地切换控制模块,用于基于所述操作信息和/或所述传感信息达到所述预定条件,利用飞控控制所述无人机在空、地模式之间进行切换,其中,所述无人机的空、地模式下的构型保持相同且无人机的轮子为受旋翼驱动的从动轮,地面模式下的所述无人机的横滚方向的自由度失能。
25、本申请还提供一种无人机,包括上述的陆空两栖无人机的空地切换系统。
26、本申请提供的陆空两栖无人机的空地切换方法、系统及无人机,所述方法通过基于所述传感信息达到所述预定条件,控制所述无人机在空、地模式之间进行自动切换,其中,地面模式下的所述无人机的横滚方向的自由度失能,所述无人机的空、地模式下的构型保持相同且无人机的轮子为受旋翼驱动的从动轮。本申请是通过在飞行式无人机的飞控中设计一套程序,使得在无人机飞到地面附近(预定高度)时,能自动切换模式。本申请将飞行和滚动两种相对独立的控制方式融合在一款机器人上,没有增加额外的电机,无人机重量更轻,续航能力更强;地面模式下,无人机的横滚方向的自由度失能,保证了在地面运行时,飞行式无人机不会侧翻。
技术特征:1.一种陆空两栖无人机的空地切换方法,其特征在于,包括:
2.根据权利要求1所述的空地切换方法,其特征在于,所述传感信息包括无人机的垂直和/或水平方向的速度、距地面的高度和/或无人机的动力值。
3.根据权利要求2所述的空地切换方法,其特征在于,所述判断所述传感信息是否达到预定条件包括:判断所述无人机的垂直和/或水平方向的速度是否达到预定值;判断所述无人机的对地高度是否达到设定值;判断油门档位是否达到预定档位;和/或油门变化是否小于预定值。
4.根据权利要求1或2或3所述的空地切换方法,其特征在于,对所述无人机的地面模式进行控制的模型包括:位置动力学模型、姿态动力学模型以及姿态运动学模型,其中,地面模式下所述无人机的z轴的位置自由度和横滚方向的姿态自由度φ均为0。
5.根据权利要求4所述的空地切换方法,其特征在于,所述位置动力学模型包括:
6.根据权利要求4所述的空地切换方法,其特征在于,所述姿态动力学模型包括:
7.根据权利要求4所述的空地切换方法,其特征在于,所述姿态运动学模型包括:
8.根据权利要求1所述的空地切换方法,其特征在于,所述无人机的旋翼与所述无人机的从动轮联动,通过调节旋翼的转速来使所述无人机在地面上前进、后退以及偏航。
9.根据权利要求7所述的空地切换方法,其特征在于,通过调节旋翼的转速来使所述无人机在地面上前进、后退包括:调节四个旋翼的前方两个旋翼的相对于后方两个旋翼的转速,使前方两个旋翼的转速与后方两个旋翼的转速之间产生转速差;
10.一种陆空两栖无人机的空地切换系统,其特征在于,包括:
11.一种无人机,其特征在于,包括上述权利要求10中所述的陆空两栖无人机的空地切换系统。
技术总结本申请提供一种陆空两栖无人机的空地切换方法、系统及无人机,该方法通过基于传感信息达到预定条件,控制无人机在空、地模式之间进行自动切换,其中,地面模式下的无人机的横滚方向的自由度失能,无人机的空、地模式下的构型保持相同且无人机的轮子为受旋翼驱动的从动轮。本申请是通过在飞行式无人机的飞控中设计一套程序,使得在无人机飞到地面附近(预定高度)时,能自动切换模式。本申请将飞行和滚动两种相对独立的控制方式融合在一款机器人上,没有增加额外的电机,无人机重量更轻,续航能力更强;地面模式下,无人机的横滚方向的自由度失能,保证了在地面运行时,飞行式无人机不会侧翻。技术研发人员:曹燕军,陈子康,宣驰策,俞志淼受保护的技术使用者:浙江大学湖州研究院技术研发日:技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240722/222551.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表