一种空间站舱内机器人推进系统
- 国知局
- 2024-08-01 06:07:37
本发明涉及空间站设备,具体来说涉及一种空间站舱内机器人推进系统。
背景技术:
1、空间站舱内机器人是用于空间站作用的辅助设备,可以辅助航天员工作,完成诸如巡视维护、物品运输、质量测量、环境监测等任务,极大减少航天员的工作量。
2、随着中国空间站的逐步建成和完善,空间站任务的常态化,各类配套的空间站设施成为研究的热点,其中包括空间站舱内机器人的研制。通常意义上的舱内机器人能够在空间站环境中进行六自由度的可控、灵敏、稳定、自主的运动,具有体积小、能耗低、噪音小、智能化的特点,能够在设定好任务要求的情况下在空间站内自主完成一些任务。
3、在现有的空间站机器人设计中,多为使用喷气的方式进行运动和姿态控制,其主要区别在于气体的来源和喷气方式。最早的spheres使用储存于高压气罐中的压缩的二氧化碳气体,虽然这样能够产生可观的推力,但由于使用高压气体作为推进剂,储量是有限的,在空间站中无法及时补充,这限制了机器人的续航能力。而且高压气体的喷出可能对空间站中的设备和人员造成损害。除此以外,储存气体的气罐有较大的质量,极大增加了机器人的体积和重量。astrobee使用离心风扇来吸气增压,有效利用了空间站的舱内气压环境,不需要额外的气源。但离心风扇的旋转会对机器人姿态造成影响,需要严格的控制,且风扇也占据了一定的体积和质量。int-ba l l使用微型风扇进行推进,使用飞轮进行姿态控制。而直接使用风扇推进产生的推力较小,控制能力有限,故需要额外的飞轮进行姿态稳定控制。这样的设计适合i nt-ba l l这样的体积小、质量轻、功能较为单一的机器人,但由于风扇直接推进的效率低、推力小,且飞轮的设计产生冗余,并不适合我们的设计要求。
4、根据对现有空间站机器人的分析,我们决定采用离心风扇吸气增压、喷口喷出气体进行推进的方式,后面的结构设计将围绕这种推进方式展开。使用这种方式推进,能够产生可观的推力,有着较好的控制能力,且能更好地利用空间站舱内的气压环境,不需要额外的气源,仅消耗电能,能够使得结构和系统相对简单。
5、在我们的初步设计中,机器人构型为一正方体,边长约为25cm,质量在5kg之内,能够产生0.5n以上的推力,能够测量自身线加速度与角加速度,实现可控的平面三自由度运动。机器人使用i mu(惯性测量单元)来测量线加速度、线速度、角加速度及角速度,实现运动的闭环控制。
6、为了便于在地面环境中进行实验,我们将对机器人的构型进行简化,使其仅能进行平面三自由度运动,这样降低了成本和系统复杂度,便于进行实验。完整的的设计中,该机器人需要使用12个喷口进行6自由度运动的控制,简化为4个喷口,仅提供前后方向的平动推力和平面内转动的力矩。
7、机器人的控制系统方面,我们使用搭载ros2(robot operat i on system,机器人操作系统)树莓派微型电脑来搭建机器人的上层控制系统。在基础的运动控制方面,使用基于c++语言的ardu i no单片机来直接控制离心风扇和喷口。ros2系统和负责基础运动控制的底层系统ardu i no、各个传感器等连接。由于ros的分布式通信的特点,可以将机器人与电脑上的ros系统互联,将部分较为复杂的计算在电脑上进行,减轻了机器人本身的运算压力,同时方便从电脑端对机器人进行远程控制。
技术实现思路
1、本发明的目的在于填补空间站舱内辅助机器人的空白,提供一种空间站舱内机器人推进系统。其中,机器人的运动采用喷气推动,离心风扇的转动采用电机驱动,喷口盖的开闭采用伺服舵机控制。为实现上述目的,本发明提供以下技术方案。
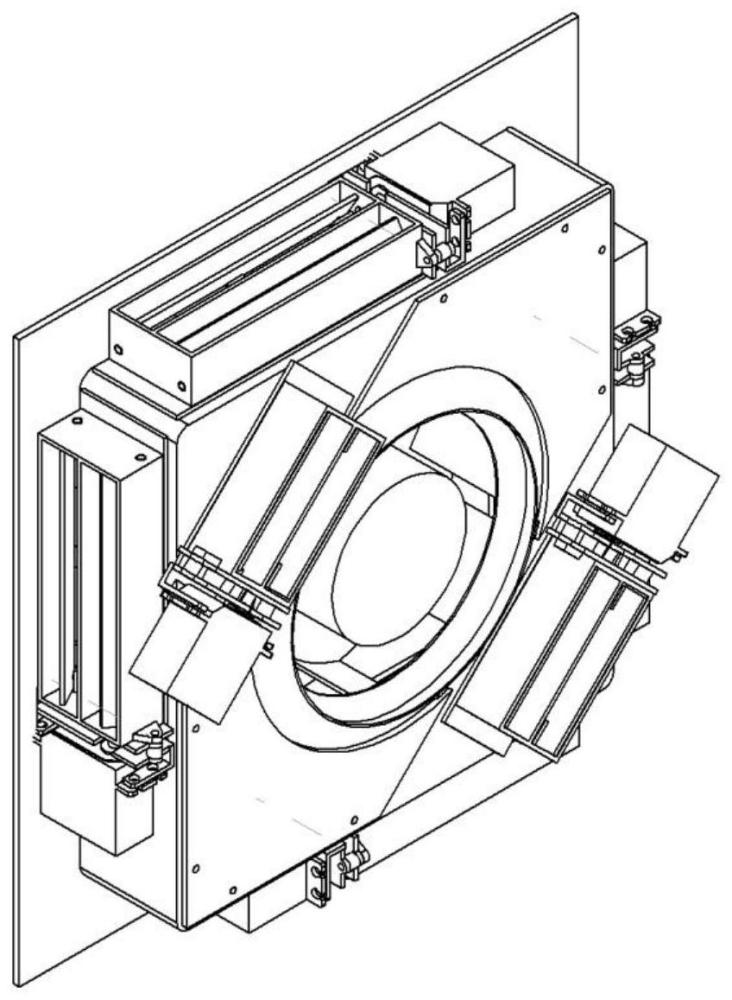
2、一种空间站舱内机器人推进系统,包括离心风扇吸气增压系统、内部曲面导流系统和出口喷气系统。其中,吸气增压系统主要部件包括进口1、叶轮2、出口3;内部曲面导流系统主要部件包括与外壳相连的弧形壁面4;出口喷气系统主要部件包括伺服舵机5、喷口壁6、喷口盖7、ⅰ型齿轮8、ⅱ型齿轮9、固定结构10。
3、所述离心风扇吸气增压系统的吸气功能是通过离心风扇的工作来完成的。整体外壳形状为长方体,由3d打印制作完成,整体材质为树脂,离心风扇安装在长方体一侧的中心,当离心风扇通电后,叶轮在电动机的作用下旋转,使壳体内部产生负压,气体经过进口被吸入壳体内部,从而实现吸气增压。
4、离心风扇的进口通常是一个圆形,它是空气流入风扇的地方,位于风扇的前端。叶轮呈圆盘状在中间有若干叶片,叶片的形状设计呈现出一定的斜角,叶片的前沿角度较小,以便于将空气吸入,并在风扇内部加速。而后沿角度较大,以便于将空气以高速甩出。使得空气能从进口处吸入并以高速旋转将空气向外甩出。离心风扇的出口是空气被抛出的地方,是一个方形的开口,位于离心风扇的后方,负责将旋转后的气流释放到弧形壁面的内侧。
5、所述内部曲面导流系统的导流功能是通过3d打印的弧形壁面引导气流,材质同样为树脂,气流沿着弧形壁面运动时,动能损耗最小,从而使出口喷气速度达到最大,增大推力。弧形壁面安装的位置在离心风扇的对侧,整体处于外壳的内部,两个壁面呈中心对称分布,其弧形壁面一端与圆形离心风扇相切,另一端恰好与喷口相连。
6、所述出口喷气系统安装的位置在弧形壁面的出口处,选用的舵机型号为sg90,两种类型的齿轮均为圆形金属齿轮,固定结构为弯折的金属薄片,一端紧贴出口凸出壳体的一侧壁面,另一端安装有sg90舵机,舵机的传动部件与ⅰ型齿轮固连,ⅱ型齿轮与ⅰ型齿轮啮合,同时ⅱ型齿轮的中心通过圆柱形金属短棒与喷口盖固连,短棒穿过固定结构的圆形孔,从而被固定。喷口盖为树脂材质的长方形薄板,其中一个长边的两端都固连有向外延申的圆柱形金属短棒,短棒都穿过喷口壁上的圆形孔来固定。当伺服舵机接受指令信号而转过一定角度时,最终控制喷口盖的转动。
7、本发明具有以下有益效果:
8、1、该发明采用离心风扇进气,提供高效率、低噪声和灵活的安装选择。
9、2、该发明的导流系统可以最大程度的利用吸入的气体,产生可观的推力。
10、3、该发明出口喷气系统可以灵活控制开口大小,进而控制推力的大小。
技术特征:1.一种空间站舱内机器人推进系统,其特征在于:包括离心风扇吸气增压系统、内部曲面导流系统和出口喷气系统;其中,所述离心风扇吸气增压系统的吸气是通过离心风扇的来完成的;所述内部曲面导流系统包括与外壳相连的弧形壁面,安装在离心风扇的对侧;所述出口喷气系统安装在弧形壁面的出口处。
2.根据权利要求1所述的一种空间站舱内机器人推进系统,其特征在于:所述离心风扇吸气增压系统包括进口、叶轮、出口。
3.根据权利要求2所述的一种空间站舱内机器人推进系统,其特征在于:所述离心风扇吸气增压系统的离心风扇的进口是一个圆形,是空气流入风扇的地方,位于风扇的前端;叶轮呈圆盘状在中间有若干叶片,叶片的形状设计呈现出一定的斜角,叶片的前沿角度小,后沿角度大,使得空气能从进口处吸入并以高速旋转将空气向外甩出;离心风扇的出口是一个方形的开口,位于离心风扇的后方,负责将旋转后的气流释放到弧形壁面的内侧。
4.根据权利要求1或2或3所述的一种空间站舱内机器人推进系统,其特征在于:所述离心风扇吸气增压系统整体外壳形状为长方体,由3d打印制作完成,整体材质为树脂,离心风扇安装在长方体一侧的中心。
5.根据权利要求1所述的一种空间站舱内机器人推进系统,其特征在于:所述内部曲面导流系统是通过3d打印的弧形壁面引导气流,材质为树脂。
6.根据权利要求5所述的一种空间站舱内机器人推进系统,其特征在于:气流沿着弧形壁面运动时,损耗最小,使出口喷气速度达到最大,增大推力;弧形壁面整体处于外壳的内部,两个壁面呈中心对称分布,其弧形壁面一端与圆形离心风扇相切,另一端恰好与喷口相连。
7.根据权利要求1所述的一种空间站舱内机器人推进系统,其特征在于:所述出口喷气系统包括伺服舵机、喷口壁、喷口盖、ⅰ型齿轮、ⅱ型齿轮、固定结构。
8.根据权利要求1或7所述的一种空间站舱内机器人推进系统,其特征在于:所述出口喷气系统两种类型的齿轮均为圆形金属齿轮,固定结构为弯折的金属薄片,一端紧贴出口凸出壳体的一侧壁面,另一端安装有sg90舵机。
9.根据权利要求8所述的一种空间站舱内机器人推进系统,其特征在于:舵机的传动部件与ⅰ型齿轮固连,ⅱ型齿轮与ⅰ型齿轮啮合,同时ⅱ型齿轮的中心通过圆柱形金属短棒与喷口盖固连,短棒穿过固定结构的圆形孔,从而被固定。
10.根据权利要求7或9所述的一种空间站舱内机器人推进系统,其特征在于:喷口盖为树脂材质的长方形薄板,其中一个长边的两端都固连有向外延申的圆柱形金属短棒,短棒都穿过喷口壁上的圆形孔来固定;当伺服舵机接受指令信号而转过一定角度时,最终控制喷口盖的转动。
技术总结本发明公开了一种空间站舱内机器人推进系统,包括离心风扇吸气增压系统、内部曲面导流系统和出口喷气系统;其中,所述离心风扇吸气增压系统的吸气是通过离心风扇的来完成的;所述内部曲面导流系统包括与外壳相连的弧形壁面,安装在离心风扇的对侧;所述出口喷气系统安装在弧形壁面的出口处。本发明针对目前空间站微重力环境下传统机器人难以正常工作的问题进行设计。平动和转动所需的力和力矩均可由喷气模块的开合来控制,简单实用。技术研发人员:钟睿,彭竹棋,殷世豪,龙家鑫,栗梓超,周煜轩,田庚居,杜一鸣受保护的技术使用者:北京航空航天大学技术研发日:技术公布日:2024/6/30本文地址:https://www.jishuxx.com/zhuanli/20240722/222777.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表