一种空间机械臂末端用电磁捕获工具
- 国知局
- 2024-08-01 06:06:53
本发明属于空间机械臂,具体涉及一种空间机械臂末端用电磁捕获工具。
背景技术:
1、随着各国航天技术的不断发展,单体航天器针对不同功能产生了多种多样的结构,而复杂的单体航天器在恶劣太空环境下的问题逐渐涌现。目前电磁对接技术处于研究初阶段,相比于其他末端捕获工具,电磁装置可以短时间对接和锁紧,简化了机械捕获技术在对接工程中所需要的牵引机构,使对接更加简单;因此,将电磁捕获技术引入到航空航天领域中进行空间漂浮捕获是一项新的创新和尝试,在现有技术中已经有了一些的将二者进行结合的先例,在专利cn104590592a中公开的一种新型空间电磁对接机构,将电磁吸附与空间捕获进行相互结合,但是该专利提供的方案存在缺陷时可控性低,可以实现对目标物体的捕获及牵引,但其发射随机性大,回收效率低,空间环境适应差。专利cn103407586a公开了一种电磁对接系统,可通过双绕阻线圈完成对空间漂浮目标的电磁捕获,但在该结构下所能提供的电磁力极小,等比缩放后也需要很大的空间进行存放。且缺少辅助机构进行固定,结构稳定性差。因此针对以上问题研发出一种新式的空间机械臂末端用电磁捕获工具是很符合实际需要的。
技术实现思路
1、本发明为了解决现有空间捕获工具存在捕获接合性不足、牵引力较弱以及捕获稳定性较差的问题,进而提供一种空间机械臂末端用电磁捕获工具;
2、一种空间机械臂末端用电磁捕获工具,所述捕获工具包括捕获模块和接收模块,捕获模块设置在空间机械臂的末端,且捕获模块与空间机械臂拆卸连接,接收模块设置在捕获目标上,且接收模块与捕获目标拆卸连接,捕获模块与接收模块对应配合设置,且捕获模块与接收模块拆卸连接;
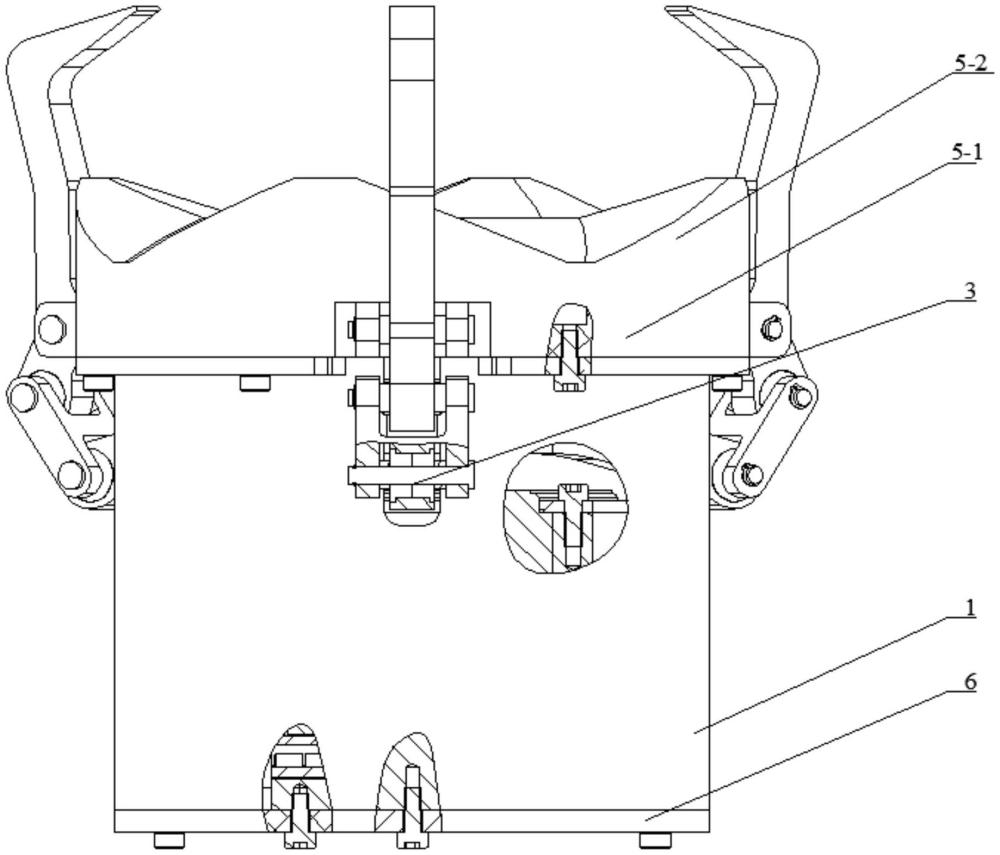
3、所述捕获模块包括基座、驱动系统、锁紧系统、电磁系统、一号导向部件和模块化机械臂接口;所述模块化机械臂接口设置在基座的底端,且模块化机械臂接口与基座通过螺栓拆卸连接,驱动系统设置在基座中,且驱动系统的底部安装在基座上,锁紧系统的安装部套装在驱动系统的动力输出端上,锁紧系统的锁紧部延伸至基座外侧,一号导向部件设置在基座的顶部,且一号导向部件与基座拆卸连接,电磁系统设置在一号导向部件中,且电磁系统与一号导向部件拆卸连接,驱动系统的顶部插设在电磁系统的底部,且驱动系统的顶部与电磁系统转动连接;
4、所述接收模块包括衔铁、缓冲系统、二号导向部件和模块化物件接口,所述衔铁设置在二号导向部件底部的中心处,且衔铁通过缓冲系统与二号导向部件活动连接,二号导向部件设置在模块化物件接口的下方,且二号导向部件与模块化物件接口拆卸连接;
5、所述二号导向部件与一号导向部件配合设置,捕获模块通过电磁系统与衔铁吸附连接,捕获模块通过锁紧系统与模块化物件接口拆卸连接;
6、进一步地,所述驱动系统包括驱动电机定子、驱动电机转子套、电机驱动模块、驱动螺杆、驱动螺母、一号角接触轴承和二号角接触轴承,所述驱动电机定子设置在基座内的中部支撑板上,且驱动电机定子通过螺栓与中部支撑板拆卸连接,驱动电机转子套插设在驱动电机定子中,且驱动电机定子与驱动电机转子套通过电磁转动连接,电机驱动模块设置在中部支撑板的下方,且电机驱动模块通过螺栓与模块化机械臂接口拆卸连接,电机驱动模块通过导线与驱动电机定子的电力输入端和电磁系统的电力输入端相连,驱动螺杆插设在驱动电机转子套中,且驱动螺杆与驱动电机转子套的内壁胶合固定,驱动螺杆的底端延伸出驱动电机转子套并插设在中部支撑板中,且驱动螺杆的底端通过一号角接触轴承与中部支撑板转动连接,驱动螺杆的顶端延伸出驱动电机转子套并插设在电磁系统中,且驱动螺杆的顶端通过二号角接触轴承与电磁系统转动连接,驱动螺母套设在驱动螺杆上,且驱动螺母与驱动螺杆螺纹传动连接,锁紧系统的安装部套设在驱动螺母上,且锁紧系统与驱动螺母固定连接;
7、进一步地,所述中部支撑板的顶部中心处设有电机定子限位套,所述驱动电机定子插设在电机定子限位套中,电机定子限位套的内环壁上沿周向等距加工有多个一号半槽,驱动电机定子的外环壁上沿周向等距加工有多个二号半槽,且每个二号半槽与一个一号半槽对应设置,每个二号半槽与对应的一个一号半槽组合形成限位销孔,每个限位销孔中对应插入一个限位销,电机定子限位套通过多个限位销对驱动电机定子进行周向限位;
8、进一步地,所述锁紧系统包括推盘和n个机械锁紧臂,n为正整数,所述推盘套设在驱动螺母上,且推盘与驱动螺母固定连接,推盘的外圆面上沿周向等距设有n个锁紧铰接臂,且每个锁紧铰接臂的一端与推盘的外圆壁一体成形设置,每个锁紧铰接臂的另一端穿过基座侧壁上的一个条形导向孔并延伸至基座外侧,每个机械锁紧臂对应设置在一个锁紧铰接臂的另一端上,且机械锁紧臂的一端与所在的锁紧铰接臂的另一端铰接设置;
9、进一步地,所述机械锁紧臂包括连杆和锁紧爪,所述连杆的一端与所在锁紧铰接臂的另一端铰接设置,锁紧爪设置在连杆的另一端上,且锁紧爪的连接端与连杆的另一端铰接设置,锁紧爪靠近连接端的侧壁上设有铰接支臂,铰接支臂的一端与锁紧爪一体成形设置,一号导向部件的外圆壁上沿周向等距设有n个支臂铰接耳,n为正整数,每个支臂铰接耳与一个锁紧铰接臂上下对应设置,铰接支臂的另一端对应设置在一个支臂铰接耳中,且每个铰接支臂的另一端与所在支臂铰接耳转动连接;
10、进一步地,所述电磁系统包括电磁铁铁芯与线圈绕组,所述电磁铁铁芯设置在一号导向部件中,且电磁铁铁芯与一号导向部件通过螺栓拆卸连接,电磁铁铁芯的顶部加工有沿轴向延伸的环形嵌槽,线圈绕组安装在环形嵌槽中,且线圈绕组的顶端低于电磁铁铁芯的顶端,驱动螺杆的顶端延伸出驱动电机转子套并插设在电磁铁铁芯中,且驱动螺杆的顶端通过二号角接触轴承与电磁铁铁芯转动连接;
11、进一步地,所述一号导向部件包括一号导向环和四个一号导向齿,电磁铁铁芯设置一号导向环中,且电磁铁铁芯通过螺栓与一号导向环拆卸连接,四个一号导向齿沿周向等距设置在一号导向环的顶部,且每个一号导向齿与一号导向环一体成形设置,每个一号导向齿包括一号凸出面、一号凹陷面、一号背弧面和两个一号侧部过度面,所述一号凹陷面和一号背弧面分别设置在一号凸出面的内外两侧,一号背弧面的顶部与一号凸出面的外侧连接,一号背弧面的底部与一号导向环中外环面的顶部连接,且一号背弧面所在环面与一号导向环的外环面共面设置,一号凹陷面的顶端与一号凸出面的内侧连接,一号凹陷面的底端与一号导向环中内环面的顶部连接,两个一号侧部过度面相对设置在一号凸出面的左右两侧,且每个一号侧部过度面的顶部与一号凸出面的一侧连接,一号侧部过度面的底部与一号导向环的顶部连接,一号侧部过度面的一侧与一号背弧面连接,一号侧部过度面的另一侧与一号凹陷面连接;
12、进一步地,所述衔铁为环状结构,二号导向部件的底端中心处加工有沿轴向延伸的衔铁环槽,衔铁对应设置在衔铁环槽中,且衔铁通过缓冲系统与衔铁环槽的槽底活动连接;
13、进一步地,所述缓冲系统包括多个缓冲单元,多个缓冲单元沿周向等距插设在衔铁环槽的槽底,且每个个缓冲单元的轴线与衔铁环槽的轴线平行设置,每个缓冲单元的顶端穿过衔铁环槽的槽底并延伸至二号导向部件的顶部,每个缓冲单元的底端延伸至衔铁环槽内并插设在衔铁中,且每个缓冲单元的底端与衔铁固定连接;
14、所述缓冲单元包括导向杆、缓冲弹簧和顶部限位块,所述导向杆插设在衔铁环槽的槽底,且导向杆与衔铁环槽的槽底间隙配合设置,导向杆的顶端穿过衔铁环槽的槽底并延伸至二号导向部件的顶部,顶部限位块设置在导向杆的顶端,且顶部限位块与导向杆一体成形设置,衔铁的顶部沿周向加工有多个导向盲孔,导向杆的底端延伸至衔铁环槽内并对应插设在衔铁上的一个导向盲孔中,且每个导向杆的底端与所在导向盲孔的孔底固定连接,缓冲弹簧对应插设在一个导向盲孔中,且缓冲弹簧套设在导向杆上,缓冲弹簧的顶端与衔铁环槽的槽底固定连接,缓冲弹簧的底端与所在导向盲孔的底部固定连接;
15、进一步地,所述二号导向部件包括二号导向环和四个二号导向齿,二号导向环的底端中心处加工有衔铁环槽,且衔铁环槽与二号导向环的内环壁连通设置,四个二号导向齿沿周向等距设置在二号导向环的底部,且每个二号导向齿与二号导向环一体成形设置,每个二号导向齿与相邻两个一号导向齿之间的间隙对应配合设置,每个二号导向齿包括二号凸出面、二号凹陷面、二号背弧面和两个二号侧部过度面,所述二号凹陷面和二号背弧面分别设置在二号凸出面的前后两侧,二号背弧面的底部与二号凸出面的后侧连接,二号背弧面的顶部与二号导向环中外环面的底部连接,且二号背弧面所在环面与二号导向环的外环面共面设置,二号凹陷面的底端与二号凸出面的前侧连接,二号凹陷面的顶端与衔铁环槽中侧环面的底部连接,两个二号侧部过度面相对设置在二号凸出面的左右两侧,且每个二号侧部过度面的底部与一号凸出面的一侧连接,二号侧部过度面的顶部与二号导向环的底部连接,二号侧部过度面的一侧与二号背弧面连接,二号侧部过度面的另一侧与二号凹陷面连接。
16、本技术相对于现有技术所产生的有益效果:
17、本发明提供的一种空间机械臂末端用电磁捕获工具,将捕获阶段分为牵引、对接和夹固三个阶段,在牵引阶段中通过给线圈绕组通电,使电磁铁铁芯磁化后吸引位于接收模块上的衔铁,在磁化吸引力的作用下使接收模块的衔铁向电磁铁铁芯运动,进而使被捕获物体靠近电磁捕获工具,在被捕获物体与电磁捕获工具进行对接时,位于捕获模块上的一号导向部件和位于接收模块上的二号导向部件之间配合,会为对接提供导向约束,可以使捕获模块与接收模块完成对心对接,保证了二者对接的准确性,通过牵引和对接,此时电磁捕获工具与被捕获目标已经在吸附力的作用处于一种预固定的状态,在此状态下通过捕获模块中的电机带动螺杆转动,进而驱动锁紧装置的末端将捕获模块与接收模块进行夹紧固定,从而保证捕获结果的稳定,在锁紧装置完成夹紧固定后线圈绕组断电,使电磁装置不需要在搬运过程中持续工作。
18、本技术提供的一种空间机械臂末端用电磁捕获工具相比于现有空间捕获装置,可以提供更好的牵引力,并且在牵引力的作用下可以为捕获路径提供一定的导向性,通过设置导向装置可以提高捕获模块与接收模块的接合性,保证捕获工作的准确性,在对接与牵引工作完成后通过锁紧单元将捕获模块与接收模块夹固,进一步提高了捕获工作的稳定,以达到准确捕获的目的。
本文地址:https://www.jishuxx.com/zhuanli/20240722/222773.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。