一种强互操作性无人机充电磁耦合机构及无线充电系统
- 国知局
- 2024-08-01 06:07:56
本发明涉及无人机无线充电领域,具体而言,涉及一种强互操作性无人机充电磁耦合机构及无线充电系统。
背景技术:
1、无人机作为高新技术装备,具备无人员伤亡、高效费比和强大的隐蔽性等核心优势,在侦察预警、跟踪定位、精确制导打击目标等各类战略和战术任务中扮演着至关重要的角色。然而,单个无人机系统的运载能力和覆盖半径都非常有限。通过多架无人机协同工作的无人机集群,可以显著提高无人机系统的工作效能。随着无人机逐渐渗透到三大产业和军用领域等各个方面,无人机的工作模式必然会朝着集群化和智能化的方向发展。然而,在动力电池能量密度没有突破性研究进展的情况下,无人机的续航能力非常有限。中小型多旋翼无人机的续航时间通常不超过40分钟,因此需要频繁为其充电。复杂而繁琐的有线充电过程对于成百上千架无人机集群的发展和应用构成了严重的限制。
2、无人机集群无线充电技术可以实现无人化和自动化的电能补给,具备物理隔离、安全可靠、灵活方便和环境适应性强等核心优势,是解决无人机集群电能补给问题的有效途径。
3、目前,无人机通常采用一对一的无线充电模式。然而,这种充电模式需要大量冗余的电力电子设备,占用了过多的地面资源,不用于无人机的批量充电。
技术实现思路
1、本发明提供一种强互操作性无人机充电磁耦合机构及无线充电系统,主要在于能够兼容不同构型无人机,满足不同构型多旋翼无人机的充电需求,从而能够有利于无人机的批量充电。
2、根据本发明实施例的第一方面,提供一种强互操作性无人机充电磁耦合机构,包括:
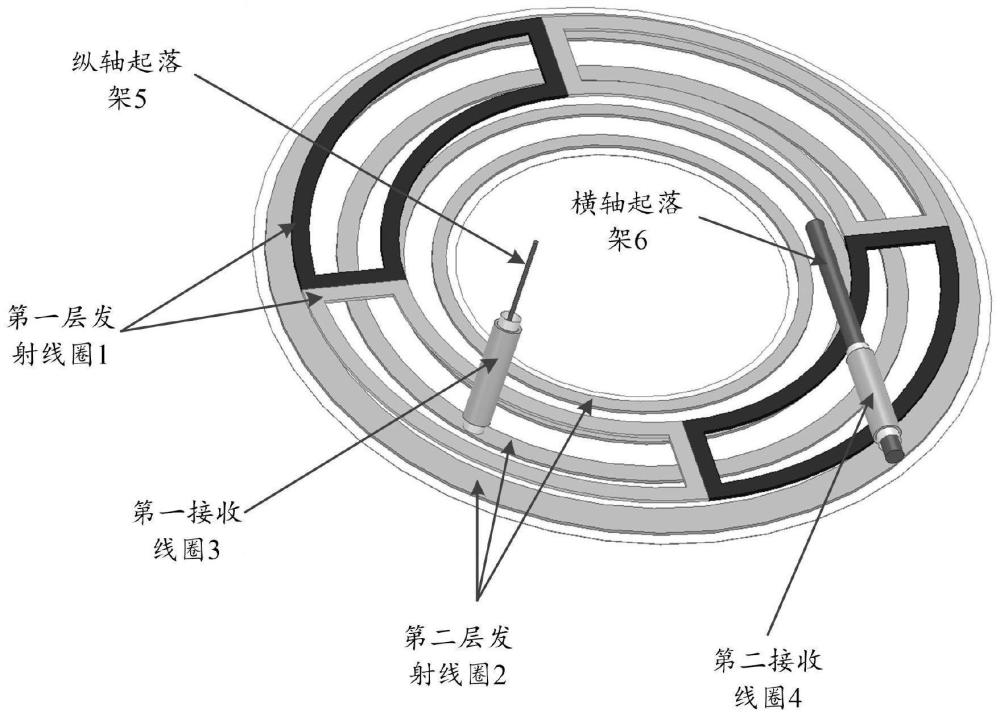
3、第一层发射线圈,位于所述第一层发射线圈下方的第二层发射线圈,以及分别缠绕在不同构型无人机起落架上的第一接收线圈和第二接收线圈;其中,在为所述不同构型无人机充电时,启用所述第一层发射线圈和/或所述第二层发射线圈与所述第一接收线圈或所述第二接收线圈进行互感。
4、可选地,所述第一层发射线圈由多个串联在一起的轨道形线圈组成,任意相邻的两个轨道形线圈的极性相反,所述轨道形线圈的数量为偶数。
5、可选地,所述第二层发射线圈由多个串联在一起的半径不同的圆形线圈组成。
6、可选地,所述第二层发射线圈的下方铺设圆环形的柔性铁基纳米晶带材磁芯,所述柔性铁基纳米晶带材磁芯的外径大于所述第二层发射线圈的最大外径,所述柔性铁基纳米晶带材磁芯的内径小于所述第二层发射线圈的最小内径。
7、可选地,不同构型无人机起落架包括a型无人机的纵轴起落架和b型无人机的横轴起落架,所述第一接收线圈安装于所述纵轴起落架的下端,所述第二接收线圈安装于所述横轴起落架两端中的任意一端。
8、可选地,所述第一接收线圈和所述第二接收线圈内侧有柔性铁基纳米晶带材分别与所述纵轴起落架和所述横轴起落架贴附,所述第一接收线圈和所述第二接收线圈内侧的柔性铁基纳米晶带材呈镂空圆柱形,其外径分别小于所述第一接收线圈的内径和所述第二接收线圈的内径。
9、可选地,所述第二层发射线圈的最大外径大于所述纵轴起落架所围成平面的最大外径和所述横轴起落架所围成平面的最大外径。
10、可选地,所述第一接收线圈的外径和所述第二接收线圈的外径分别大于纵轴起落架直径和横轴起落架直径。
11、可选地,当为所述a型无人机充电,且要求的充电速度小于或者等于预设充电速度时,启用所述第一层发射线圈,以使所述第一层发射线圈与所述第一接收线圈产生互感;
12、当为所述b型无人机充电,且要求的充电速度小于或者等于预设充电速度时,启用所述第二层发射线圈,以使所述第二层发射线圈与所述第二接收线圈产生互感;
13、当为所述a型无人机充电,且要求的充电速度大于预设充电速度时,同时启用所述第一层发射线圈和所述第二层发射线圈,以使所述第一层发射线圈和所述第二层发射线圈分别与所述第一接收线圈产生互感;
14、当为所述b型无人机充电,且要求的充电速度大于预设充电速度时,同时启用所述第一层发射线圈和所述第二层发射线圈,以使所述第一层发射线圈和所述第二层发射线圈分别与所述第二接收线圈产生互感。
15、根据本发明实施例的第二方面,提供一种无线充电系统,包括:无人机充电磁耦合机构、原边电路和副边电路;所述无人机充电磁耦合机构中的第一层发射线圈和第二层发射线圈分别与所述原边电路连接,所述无人机充电磁耦合机构中的第一接收线圈和第二接收线圈分别与所述副边电路连接,所述副边电路与无人机负载连接;
16、所述原边电路,用于根据无人机构型,启用所述第一层发射线圈和/或所述第二层发射线圈与所述第一接收线圈或所述第二接收线圈进行互感,以在所述副边电路中产生电流,为所述无人机负载进行充电。
17、可选地,所述副边电路包括:第一副边电路和第二副边电路;所述第一副边电路与所述第一接收线圈和a型无人机负载连接,所述第二副边电路与所述第二接收线圈和b型无人机负载连接。
18、可选地,所述原边电路包括:直流电源、逆变电源电路、第一原边补偿电路和第二原边补偿电路,所述第一原边补偿电路与所述第一层发射线圈连接,所述第二原边补偿电路与所述第二层发射线圈连接,所述直流电源与所述逆变电源电路连接;
19、所述逆变电源电路,用于接收所述无人机发送的状态信息,并根据所述状态信息中的无人机构型,开通所述第一原边补偿电路和/或所述第二原边补偿电路,以启用所述第一层发射线圈和/或所述第二层发射线圈。
20、可选地,所述原边电路,具体用于若所述无人机构型为a型,且要求的充电速度小于或者等于预设充电速度,则启用所述第一层发射线圈与所述第一接收线圈进行互感,以在所述第一副边电路中产生电流,为所述a型无人机负载进行充电;若所述无人机构型为b型,且要求的充电速度小于或者等于预设充电速度,则启用所述第二层发射线圈与所述第二接收线圈进行互感,以在所述第二副边电路中产生电流,为所述b型无人机负载进行充电;若所述无人机构型为a型,且要求的充电速度大于预设充电速度,则同时启用所述第一层发射线圈和所述第二层发射线圈与所述第一接收线圈进行互感,以在所述第一副边电路中产生电流,为所述a型无人机负载进行充电;若所述无人机构型为b型,且要求的充电速度大于预设充电速度,则同时启用所述第一层发射线圈和所述第二层发射线圈与所述第二接收线圈进行互感,以在所述第二副边电路中产生电流,为所述b型无人机负载进行充电。
21、可选地,所述逆变电源电路包括:第一半导体场效应管、第二半导体场效应管、第三半导体场效应管和第四半导体场效应管,以及驱动电路和控制电路;所述第一半导体场效应管和所述第四半导体场效应管串联后并联在所述直流电源的两端,所述第二半导体场效应管和所述第三半导体场效应管串联后并联在所述直流电源的两端,所述第一半导体场效应管的源极和所述第四导体场效应管的漏极与所述第一原边补偿电路的一端连接,所述第四半导体场效应管的源极与所述第一原边补偿电路的另一端连接,所述第二半导体场效应管的源极和所述第三半导体场效应管的漏极与所述第二原边补偿电路的一端连接,所述第三半导体场效应管的源极与所述第二原边补偿电路的另一端连接,所述第一半导体场效应管的栅极、所述第二导体场效应管的栅极、所述第三导体场效应管的栅极和所述第四导体场效应管的栅极分别与所述驱动电路连接,所述驱动电路与所述控制电路连接;
22、所述控制电路,用于接收所述无人机发送的状态信息,并根据所述状态信息中的无人机构型,控制所述驱动电路分别向所述第一半导体场效应管、所述第二半导体场效应管、所述第三半导体场效应管和所述第四半导体场效应管发送相应的驱动信号,以控制所述第一半导体场效应管、所述第二半导体场效应管、所述第三半导体场效应管和所述第四半导体场效应管连通或者断开,从而启用所述第一层发射线圈和/或所述第二层发射线圈。
23、可选地,第一原边补偿电路包括:第一原边补偿电感、第一原边补偿电容和第二原边补偿电容;所述第一原边补偿电感的一端与所述逆变电源电路连接,所述第一原边补偿电感、所述第一原边补偿电容和所述第一层发射线圈依次串联,所述第二原边补偿电容与串联后的第一原边补偿电容和第一层发射线圈并联。
24、可选地,第二原边补偿电路包括:第二原边补偿电感、第三原边补偿电容和第四原边补偿电容;所述第二原边补偿电感的一端与所述逆变电源电路连接,所述第二原边补偿电感、所述第三原边补偿电容和所述第二层发射线圈依次串联,所述第四原边补偿电容与串联后的第三原边补偿电容和第二层发射线圈并联。
25、可选地,所述第一副边电路包括:第一副边补偿电路和第一不控整流电路,所述第一副边补偿电路分别与所述第一接收线圈和所述第一不控整流电路连接,所述第一不控整流电路与所述a型无人机负载连接。
26、可选地,所述第二副边电路包括:第二副边补偿电路和第二不控整流电路,所述第二副边补偿电路分别与所述第二接收线圈和所述第二不控整流电路连接,所述第二不控整流电路与所述b型无人机负载连接。
27、可选地,所述第一副边补偿电路包括:第一副边补偿电感、第一副边补偿电容和第二副边补偿电容;所述第一副边补偿电感的一端与所述第一不控整流电路连接,所述第一副边补偿电感、所述第一副边补偿电容和所述第一接收线圈次串联,所述第二副边补偿电容与串联后的第一副边补偿电容和第一接收线圈并联。
28、可选地,所述第一不控整流电路包括:第一二极管、第二二极管、第三二极管和第四二极管;所述第一二极管和所述第二二极管串联后并联在所述所述a型无人机负载的两端,所述第三二极管和所述第四二极管串联后并联在所述所述a型无人机负载的两端,所述第二二极管的阴极和所述第一二极管的阳极与所述第一副边补偿电路的一端连接,所述第三二极管的阳极和所述第四二极管的阴极与所述第一副边补偿电路的另一端连接。
29、可选地,所述第二副边补偿电路包括:第二副边补偿电感、第三副边补偿电容和第四副边补偿电容;所述第二副边补偿电感的一端与所述第二不控整流电路连接,所述第二副边补偿电感、所述第三副边补偿电容和所述第二接收线圈次串联,所述第四副边补偿电容与串联后的第三副边补偿电容和第二接收线圈并联。
30、可选地,所述第二不控整流电路包括:第五二极管、第六二极管、第七二极管和第八二极管;所述第五二极管和所述第六二极管串联后并联在所述所述b型无人机负载的两端,所述第七二极管和所述第八二极管串联后并联在所述所述b型无人机负载的两端,所述第六二极管的阴极和所述第五二极管的阳极与所述第二副边补偿电路的一端连接,所述第三二极管的阳极和所述第四二极管的阴极与所述第二副边补偿电路的另一端连接。
31、本发明提供的种无人机充电磁耦合机构及无线充电系统,通过设置适用于不同构型无人机的第一层发射线圈和第二层发射线圈,以及适用于不同起落架的第一接收线圈和第二接收线圈,能够兼容不同构型无人机,满足不同构型多旋翼无人机的充电需求,从而能够有利于无人机的批量充电。
32、上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
本文地址:https://www.jishuxx.com/zhuanli/20240722/222779.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表