一种无人机户外智能充电方法与流程
- 国知局
- 2024-08-01 06:12:07
本发明涉及无人机,具体为一种无人机户外智能充电方法。
背景技术:
1、水利工程勘察设计建设,以及自然资源测绘,交通、电力、城市建设等各行业均需要户外微型或小型低空无人机,针对于此类无人机,均需要采用对应的充电设备对其内部电池进行充电处理。
2、公开号为cn108255220a的申请公开了一种基于无线充电的户外农业管理系统及充电方法,包括控制主机、执行机构、传感器组和无线充电装置;所述控制主机通过总线分别与所述执行机构、所述传感器组和所述无线充电装置相连;传感器组中的每个传感器顶部均设有无线充电接收板,无线充电装置为带无线充电发射板的无人机。本发明采用无人机进行无线充电,解决了传统需要敷设供电线缆的问题,同时也解决了无线充电装置的安装和回收问题,能在预设空间范围内进行快速无线充电,使用方便;智能化程度高,能获取每个传感器的充电间隔时间,以判定传感器的电池是否处于正常状态,使用方便。
3、无人机在进行户外充电时,因外部环境的限定,需采用指定的太阳能发电设备对无人机进行充电处理,但在实际充电过程中,因太阳能发电设备充电速率与无人机的放电速率存在具体差异,会导致无人机提前落地,但所充电的适配电量并不满足无人机使用,便会造成时间差,容易增加对应无人机的相应工作时间。
技术实现思路
1、针对现有技术的不足,本发明提供了一种无人机户外智能充电方法,解决了太阳能发电设备充电速率与无人机的放电速率存在具体差异,会导致无人机提前落地,但所充电的适配电量并不满足无人机使用,便会造成时间差,容易增加对应无人机的相应工作时间的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种无人机户外智能充电方法,包括以下步骤:
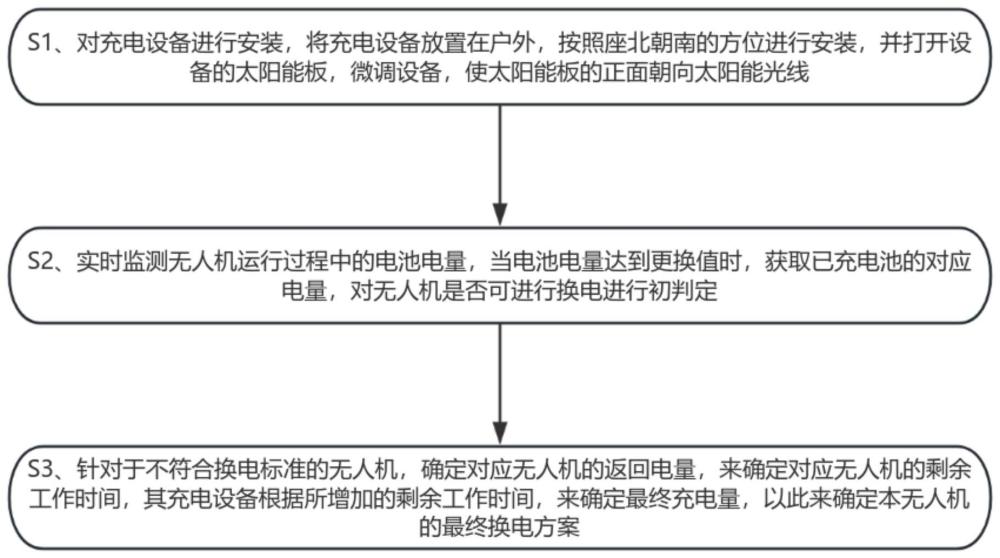
3、s1、对充电设备进行安装,将充电设备放置在户外,按照座北朝南的方位进行安装,并打开设备的太阳能板,微调设备,使太阳能板的正面朝向太阳能光线;
4、s2、实时监测无人机运行过程中的电池电量,当电池电量达到更换值时,获取已充电池的对应电量,对无人机是否可进行换电进行初判定,包括:
5、s21、将无人机的实时电池电量标定为dli,其中i代表不同的无人机,当实时监测的电池电量dli满足:dli≤y1时,获取已充电池的对应电量dd;
6、s22、再获取本无人机下次行驶任务的具体行驶路程,并将其标定为li,其中i代表不同的无人机,确认本无人机在执行上次行驶任务的电量消耗值以及行驶路程,获取单位行驶路程的电量消耗均值,其电量消耗均值=电量消耗值÷行驶路程,将所确定的电量消耗均值标定为ji,采用xqi=ji×li确认对应无人机下次行驶任务的需求电量xqi;
7、s23、若dd≥xqi代表此无人机可进行换电,并生成换电信号,无人机基于此换电信号,返回充电处并进行电池换电,若dd<xqi时,则执行后续步骤;
8、s3、针对于不符合换电标准的无人机,确定对应无人机的返回电量,来确定对应无人机的剩余工作时间,其充电设备根据所增加的剩余工作时间,来确定最终充电量,以此来确定本无人机的最终换电方案,包括:
9、s31、基于所确定的电量消耗均值以及返回行驶路程,确定无人机返回换电处的返回电量fhi,采用dli-fhi=czi确定无人机的可行驶电量czi,基于本无人机在本次行驶任务中的具体行驶时间以及具体耗电量,确定单位时间内的耗电均量,其耗电均量=具体耗电量÷具体行驶时间,将所确定的耗电均量标定为hji,采用czi÷hji=ti确定本无人机还可正常行驶的具体时间ti;
10、s32、确定已充电池的对应电量dd,并通过本阶段充电过程中的相应充电数据,生成其充电速率变化曲线,从充电速率变化曲线内确定最大充电速率值以及最小充电速率值,将最大充电速率值标定为cdmax,将最小充电速率值标定为cdmin,采用cdmax×ti=zdmax以及cdmin×ti=zdmin得到具体时间ti所产生的最大电量增量值zdmax以及最小电量增量值zdmin,并通过dd+zdmax=zzmax以及dd+zdmin=zzmin确定已充电池在后续ti时间内所能产生的电量数值区间[zzmin,zzmax];
11、s33、确定对应无人机的需求电量xqi,确认xqi是否满足:xqi∈[zzmin,zzmax]则执行步骤s34,若且xqi>zzmax,则直接生成换电信号,控制无人机飞回;
12、若且xqi<zzmin时,当无人机在工作ti时间后,生成换电信号,并控制无人机飞回;
13、s34、确认xqi与zzmin之间的数值长度:sz1=zzmin-xqi,以及xqi与zzmax的数值长度:sz2=zzmax-xqi,分析sz1与sz2之间是否满足:sz2≥sz1×2,若满足,则当无人机在工作ti时间后,生成换电信号,并控制无人机飞回,若不满足,则生成不达标信号,并直接生成换电信号,控制无人机飞回;
14、s4、限定一组监测周期,并确定本监测周期内不达标信号的个数,若个数超过指定数值时,则进行数值分析,判定其充电设备的充电速率是否满足无人机的对应需求;具体子步骤包括:
15、s41、限定监测周期t,其中t为预设值,确定监测周期t内不达标信号的个数g,分析g是否满足:g≥5,若满足,则执行步骤s42,若不满足,则不进行处理;
16、s42、确认对应无人机所使用电池的充电速率曲线以及放电速率曲线,其曲线的时间线位于本监测周期t内,将充电速率曲线的初始时刻以及放电速率曲线的初始时刻均标定为0时刻,并将两组曲线放置于同一坐标系内;
17、s43、从坐标系内,将充电速率曲线位于放电速率曲线上方的部分线段标定为主线段,将充电速率曲线位于放电速率曲线下方的部分线段标定为次线段,并直接确认主线段线长与次线段线长的线段比值;
18、s44、再对本监测周期t内所确定的同一使用电池的速率曲线进行处理,确认对应的线段比值,将所确认的若干组线段比值进行均值处理,确定比值均值,并判定比值均值是否满足:比值均值>0.6,若满足,则不进行任何处理;若不满足:比值均值>0.6,则生成设备添加信号,并进行展示。
19、本发明提供了一种无人机户外智能充电方法。与现有技术相比具备以下
20、有益效果:
21、本发明通过在外部设置充电设备,可基于无人机的用电情况,进行实时换电,保障无人机的工作效率;
22、无人机在换电时,分析其放电速率以及充电设备的对应充电速率,再通过分析其数值的相应变化,判定工作过程中的无人机是否符合换电条件,提前分析判定,可锁定后续的具体换电方案,进一步保障换电效率,缩短换电过程中的停留时间,保障无人机的智能充电;
23、后续,通过分析周期内其无人机相应地数值变化情况,来确定无人机在换电时是否需要新增充电设备,以此来保障无人机的正常换电,保障充电效率。
技术特征:1.一种无人机户外智能充电方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种无人机户外智能充电方法,其特征在于,所述步骤s2中,对无人机是否可进行换电的初判定方式包括:
3.根据权利要求2所述的一种无人机户外智能充电方法,其特征在于,所述步骤s23中,若dd<xqi时,则执行后续步骤。
4.根据权利要求3所述的一种无人机户外智能充电方法,其特征在于,所述步骤s3中,确定最终换电方案的子步骤包括:
5.根据权利要求4所述的一种无人机户外智能充电方法,其特征在于,所述步骤s33中,若且xqi<zzmin时,当无人机在工作ti时间后,生成换电信号,并控制无人机飞回。
6.根据权利要求4所述的一种无人机户外智能充电方法,其特征在于,所述步骤s3中,确定最终换电方案的子步骤还包括:
7.根据权利要求6所述的一种无人机户外智能充电方法,其特征在于,还包括以下步骤:
8.根据权利要求7所述的一种无人机户外智能充电方法,其特征在于,所述步骤s4中,判定其充电设备的充电速率是否满足无人机需求的具体子步骤包括:
9.根据权利要求8所述的一种无人机户外智能充电方法,其特征在于,所述比值均值若不满足:比值均值>0.6,则生成设备添加信号,并进行展示。
技术总结本发明公开了一种无人机户外智能充电方法,本发明涉及无人机技术领域,解决了太阳能发电设备充电速率与无人机的放电速率存在具体差异,会导致无人机提前落地,但所充电的适配电量并不满足无人机使用,便会造成时间差,容易增加对应无人机的相应工作时间的问题,本发明通过无人机在换电时,分析其放电速率以及充电设备的对应充电速率,再通过分析其数值的相应变化,判定工作过程中的无人机是否符合换电条件,提前分析判定,可锁定后续的具体换电方案,进一步保障换电效率,缩短换电过程中的停留时间,保障无人机的智能充电。技术研发人员:陈翠艳,叶德鸿,刘秀平,丁林磊,熊建伟,刘秀利,段轶丹,刘雨萌,段景元,苏辉臻受保护的技术使用者:广西嘉恒信息技术有限公司技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240722/222881.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。