一种航天器在轨服务六自由度运动模拟系统及其模拟方法
- 国知局
- 2024-08-01 06:12:16
本发明属于飞行器地面模拟,具体涉及一种航天器在轨服务六自由度运动模拟系统及其模拟方法。
背景技术:
1、由于空间活动日渐频繁,空间碎片数量日益增多,给空间飞行器带来较大的安全隐患。而空间飞行器一旦发生无法自主修复的故障,会造成极大的经济损失。对空间飞行器进行服务和维护,不仅可以对故障飞行器进行维修,还可以延长正常飞行器的使用寿命,极大地节省了执行空间任务花费的成本。在地面对空间在轨服务和维护过程进行仿真模拟,可以提前排除潜在的问题,提高空间在轨服务的稳定性和安全性,对确保任务圆满完成具有重要的意义。
2、授权公告号为cn113619818b、发明名称为“基于气浮滑轮的六自由度微重力试验系统”的发明专利,设计了基于气浮滑轮的六自由度微重力试验系统,利用气浮球轴承、气足、气浮滑轮和配重等对空间设备进行六自由度地面模拟。其中在竖直方向上通过哑铃形气浮滑轮和配重框进行零重力模拟,实现载荷重力的完全卸载,为空间设备的地面试验提供零重力条件,提高地面仿真的精度。但是竖直自由度采用机械构件和电机进行模拟,竖直方向可支撑的测试设备的最大重量有限。竖直微重力模拟装置结构复杂,容易引入干扰且难以维护。
3、授权公告号为cn103514792b、发明名称为“空间六自由度气浮随动运动平台”的发明专利,通过气浮的方式实现三自由度的转动和两自由度的平动,并且具有竖直方向重力平衡设备,实现了空间设备的六自由度地面仿真模拟。在竖直方向上采用液压平衡技术实现一个自由度的运动,可在微重力环境下进行空间设备运动模拟,其虽然实现了六自由度的地面仿真系统,考虑了对竖直自由度进行地面模拟的方案,但是使用液压技术进行模拟,液体的粘性在竖直方向引入额外的阻力和干扰,对地面仿真模拟的精度产生影响。
技术实现思路
1、本发明为了解决航天器在轨服务六自由度运动模拟系统干扰大、精度低、承载重量小的问题,提出一种航天器在轨服务六自由度运动模拟系统及其模拟方法。
2、为实现上述目的,本发明通过以下技术方案实现:
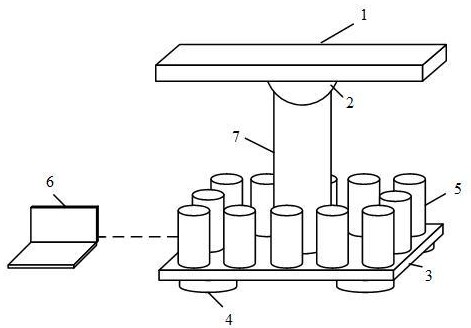
3、一种航天器在轨服务六自由度运动模拟系统,包括仪表平台、气浮球轴承、基座、气足、高压气瓶、地面监控系统、竖直方向运动单元;
4、所述仪表平台和气浮球轴承构成气浮上平台,所述基座、气足、高压气瓶构成气浮下平台,所述竖直方向运动单元包括外轴套筒和内杆,内杆下部套装在外轴套筒内,外轴套筒和内杆间形成空隙,空隙通过进气管道与高压气瓶连接,空隙通过出气管道连接外界大气,进气管道和出气管道上均设置有气体比例阀,空隙内充入高压气体形成气膜,所述外轴套筒的外侧安装有气压传感器和位移传感器;
5、所述仪表平台连接气浮球轴承,所述气浮球轴承连接竖直方向运动单元的内杆,所述竖直方向运动单元的外轴套筒安装在基座上,所述高压气瓶安装在基座上,所述基座下表面安装有气足;
6、所述地面监控系统通过信号连接气压传感器、位移传感器、气体比例阀。
7、进一步的,气浮球轴承采用三自由度转动的气浮球结构。
8、进一步的,所述气体比例阀用于实现竖直方向运动单元的进气和出气控制,在气体比例阀的控制作用下,竖直方向运动单元内的气压变化的表达式为:
9、;
10、其中,为竖直方向运动单元内的气体压力,为内杆的位置,为内杆的截面积,为内杆与外轴套筒之间空腔的初始体积,为环境温度,为地面监控系统的输出,为气压控制的误差,为气体绝热系数,为理想气体常数与环境和气体种类有关,为气体压力的变化率,为内杆运动速度。
11、一种航天器在轨服务六自由度运动模拟系统的模拟方法,依托于所述的一种航天器在轨服务六自由度运动模拟系统实现,包括如下步骤:
12、s1. 对所述的一种航天器在轨服务六自由度运动模拟系统进行安装,检查高压气瓶的压力和地面监控系统的电源是否充足,若不足,进行充气和充电;
13、s2. 确定所述的一种航天器在轨服务六自由度运动模拟系统的基本信息,基于竖直方向干扰阻力自动补偿方法进行干扰力测量和补偿,得到干扰力补偿值气压为;
14、s3. 对所述的一种航天器在轨服务六自由度运动模拟系统上电,通气,通过竖直方向运动单元将气浮上平台浮起到设定位置,并完成重力补偿的自寻零过程,得到对重力进行补偿的气压设定值;
15、s4. 基于步骤s3得到的对重力进行补偿的气压设定值进行六自由度空间环境仿真实验,在实验过程中通过气压或位置闭环切换的控制方法进行气压波动补偿,通过响应及气压传递延迟控制方法进行气压传递延迟补偿,通过动态误差自动平衡方法进行速度补偿;
16、s5. 保存实验数据,完成六自由度空间环境仿真实验。
17、进一步的,步骤s2中基于竖直方向干扰阻力自动补偿方法的具体实现方法包括如下步骤:
18、s2.1. 构建基于竖直方向干扰力计算干扰力补偿值气压的计算方法,表达式为:
19、;
20、其中,为内杆的长边长,为内杆的短边长,为常数,为内杆的截面积,为大气压,为干扰力补偿值气压,为气浮上平台和内杆的总重量,为重力加速度,为内杆的运动速度,为摩擦干扰力,为水力直径,为流体的雷诺系数,为累加序列中元素的序号,为竖直方向运动单元内的气体压力;
21、s2.2. 采集在不同高度和负载下的干扰力数据,采集方法包括如下步骤:
22、s2.2.1. 首先选定初始位置,将初始位置的干扰力设置为零,气浮上平台不加负载,地面监控系统读取位移传感器的数据,然后控制气体比例阀使气浮上平台位置稳定,采集对应气压数值,计算气浮上平台自身的重力;
23、s2.2.2. 在气浮上平台加入不同的重量已知的负载,然后控制气体比例阀调整竖直方向运动单元内的气压,使气浮上平台浮起到不同位置,采集不同位置稳定后对应的气压数值,计算在不同气压下干扰力的大小,得到多组干扰力数据;
24、s2.3. 将步骤s2.2得到的多组干扰力数据用于神经网络的训练,网络的第一层负责接收输入数据并进行初步处理,第二层负责提取特征和模式,而第三层则输出预测的干扰力,通过反向传播算法和梯度下降法,自动调整权重,以最小化干扰力预测值和实际值之间的差异,最终得到训练好的神经网络模型用于预测干扰力,然后计算干扰力补偿值对应的气压数值。
25、进一步的,步骤s3中重力补偿的自寻零过程的具体实现方法包括如下步骤:
26、s3.1. 首先地面监控系统读取气压传感器的气压数据,控制气体比例阀进行气压控制,使气压大于气浮上平台的重力,气浮上平台逐渐上升到设定位置附近,当位置接近设定位置后,通过精确调控气体比例阀来实现气浮上平台的位置的精确控制;
27、s3.2. 当气浮上平台的位置保持稳定时,气压实现对重力的补偿,记录气压数值,在干扰力补偿气压的基础上,得到对重力进行补偿的气压设定值,完成重力补偿的自寻零过程。
28、进一步的,步骤s4中通过气压或位置闭环切换的控制方法进行气压波动补偿的具体实现方法为:基于得到的气压设定值,地面监控系统实时读取气压传感器的数据得到竖直方向运动单元内的气体压力,实时读取位移传感器的数据得到内杆的位置,并计算气压控制的误差和位置误差;当气压误差≥0.002kpa时,使用气压闭环控制,当气压误差<0.002kpa时,使用位移闭环控制,表达式为:
29、;
30、其中,为地面监控系统输出,为气压闭环控制,为位移闭环控制。
31、进一步的,步骤s4中响应及气压传递延迟控制方法的具体实现方法为:
32、在地面监控系统的输出中引入两个补偿项,对气压传递延迟进行补偿,得到优化的地面监控系统输出的表达式为:
33、;
34、其中,为优化的地面监控系统输出,为气压控制的误差,分别为第一个补偿项的比例系数和积分系数,分别为第二个补偿项的比例系数和积分系数,通过调整可调节系数实现对气压传递延迟过程的补偿。
35、进一步的,步骤s4中动态误差自动平衡方法的具体实现方法为:
36、s4.1. 设置在速度的影响下,气压的变化表达式为:
37、;
38、其中,为内杆与外轴套筒之间空腔的初始体积,为环境温度;
39、s4.2. 地面监控系统实时读取气压传感器的数据得到竖直方向运动单元内的气体压力,实时读取位移传感器的数据得到内杆的位置,使用模糊控制的输出作为速度的补偿项,得到优化后的气压闭环控制的表达式为:
40、;
41、其中,为优化后的气压闭环控制,表示模糊控制的输出。
42、本发明的有益效果:
43、本发明所述的一种航天器在轨服务六自由度运动模拟系统,竖直微重力模拟系统结构简单,摩擦干扰小,精度高,承载大。
44、本发明所述的一种航天器在轨服务六自由度运动模拟系统,无需提前对被测设备称重,竖直微重力模拟系统可自行完成寻零过程。
45、本发明所述的一种航天器在轨服务六自由度运动模拟系统,无需额外的气浮上平台质量监控设备,竖直微重力模拟系统可自主实现质量特性监控和调整。
46、本发明所述的一种航天器在轨服务六自由度运动模拟系统,竖直方向无需额外的干扰力平衡装置,可自行实现干扰力的补偿,提高微重力仿真精度。
47、本发明所述的一种航天器在轨服务六自由度运动模拟系统,可对空间设备运行环境进行六自由度的地面仿真,提高空间任务的可靠性。
48、本发明所述的一种航天器在轨服务六自由度运动模拟方法,使用气压/位置闭环切换的控制方法,能够精确修正气压微小波动造成的影响。通过补偿气压传递延迟,提高气压控制的精度和稳定性。使用基于模糊控制思想的动态误差自动平衡方法,改善气压控制动态精度,提升地面模拟精度。
本文地址:https://www.jishuxx.com/zhuanli/20240722/222892.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表