一种采用刚柔混合悬挂机构的树障清理飞行机器人的制作方法
- 国知局
- 2024-08-01 06:13:08
本发明涉及一种采用刚柔混合悬挂机构的树障清理的飞行机器人,尤其涉及一种悬挂刀具对树障顶部或侧面实施大面积快速清理的飞行机器人,属于输电线路树障清理装置。
背景技术:
1、树障是输电线路通道存在的一种安全隐患,表现为线路通道内树木的不断增生逐渐威胁到输电线路的运行安全。为此,各级电力部门每年都要投入大量的人力、物力与财力对辖区内的通道树障进行清理整治。目前的树障清理主要有三种方式:1)人工清障,多采用特制的加长切割刀具,作业效率低,安全风险大,且难以清理高空树障;2)基于地面专用设备的清障,受到地形环境和树木生长态势的限制,机动性不足,难以对高空树障进行快速削巅清理;3)基于飞行器的树障清理,国内外均有探索性的工作,但依然存在着抗树木干扰能力弱、作业效率不高、使用不方便等不足。因此,亟需研制一种可对电力线路通道内树障进行大范围自动高效清理的飞行机器人。
2、申请号为20181019208.3的发明专利“一种树障清理空中机器人”公开了一种装有前置刀具机械臂的树障清理空中机器人设计方案。其作业臂的一端通过减振装置连接到机体下端、另一端与前端刀具杆连接。由于机械臂向前伸出较长,前端有刀具负载,导致整机俯仰惯量较大。在树障清理过程中,一旦刀具受到外力干扰,空中机器人姿态回稳难度较大,阻尼显得不足。此外,若机械臂被树枝缠绕或前端刀具卡阻于树干中,整机将会面临失控、坠毁的风险。由于整机重心平衡的需要,前伸的作业刀具质量受限,故而采用的刀片较小,切割范围有限,实际清障效率有待提升。
3、申请号为201810192091.1的发明专利“一种悬挂刀具结构的树障清理空中机器人”公开了一种在无人机底部连杆连接着自然悬垂作业刀具的树障清理空中机器人。该机器人可从树障顶部自上而下或从树障侧面自外而内地实施“剃头式”树障清理,其刀具系统由多片圆盘锯组成,切割范围大。由于该机器人的刀具系统与飞行平台通过硬杆连接,清障过程中树枝的反作用力与刀具振动直接传递至飞行平台,影响到机器人的姿态稳定性,并带来控制的难度。此外,采用固定连杆连接的空中机器人,存在着起飞与降落的不便,不利于实际场景的应用。
4、申请号为201810192075.2的发明专利“一种绳悬挂刀具的树障清理空中机器人”公开了一种在无人机底部使用挂绳连接着自然悬垂作业刀具的树障清理飞行机器人。一方面,由于无人机-软绳-刀具所组成系统缺乏刚性,作业刀具缺少水平支撑,因而在接触树障的瞬间极易被弹开,造成刀具往复摆动,不仅无法形成稳定的切割,而且造成机器人重心位置的变化,影响到机器人飞行的稳定性与操控性;另一方面,刀具切割树障的径向推进力来自于刀具自身重力的水平分量,相对较小。两个方面因素导致整机作业出现“使不上力”的现象,树障清理效率较低。
5、通过对相关发明的分析可以看到,现有的树障清理飞行机器人还难以实现稳定性、高效性、安全性、易用性及智能性等方面的兼顾,改善与提升的空间较大。
技术实现思路
1、本发明解决的技术问题是:提出一种采用刚柔混合悬挂机构的树障清理飞行机器人,在旋翼类飞行器的下方通过该刚柔混合悬挂机构挂载由多个刀锯阵列而成的刀具系统,实现对线路通道内树障的稳定与高效清理,同时解决悬挂刀具类型飞行机器人起降不便的不足,满足输电线路树障清理安全作业的需求。
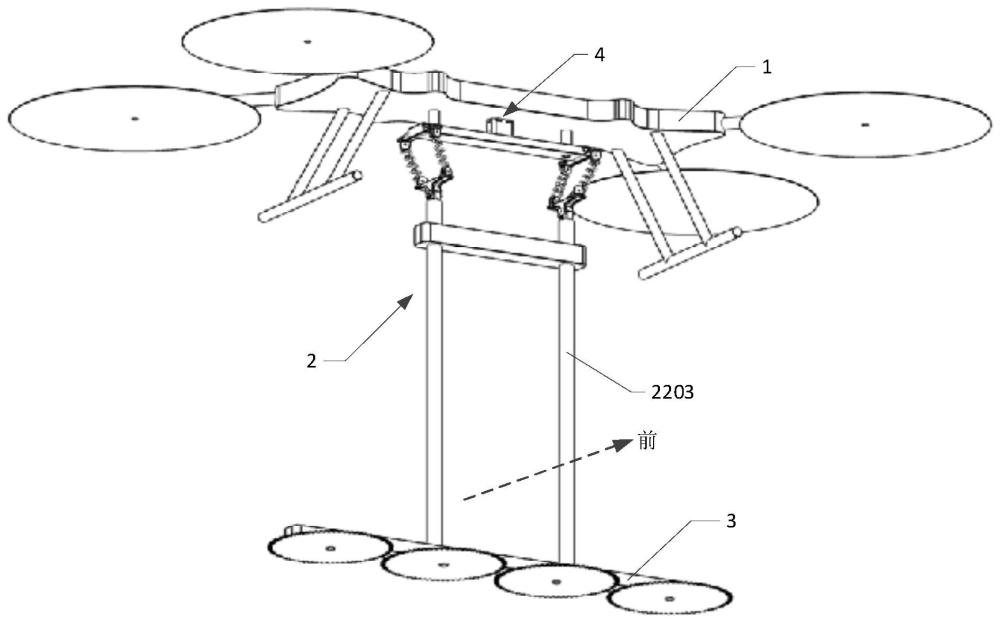
2、本发明的技术方案为:一种采用刚柔混合悬挂机构的树障清理飞行机器人,包括自上而下依次连接的飞行平台、悬挂机构和刀具系统;所述悬挂机构包括连接于飞行平台下方基于多点平衡连接的柔性浮动台、与柔性浮动台下端铰接并具有前后旋转自由度的刚性连接架,刚性连接架的下端连接刀具系统;所述刀具系统包含由多个刀锯以左右几何对称或质量对称方式组合而成的刀锯阵列。
3、优选的,上述柔性浮动台包括与飞行平台连接的悬挂架、固定于悬挂架左右两端的上基座、通过连接器挂接于上基座下方的下基座;上述刚性连接架包括与下基座下部构成前后旋转铰接的上连杆、固连于两侧上连杆下端的水平加强件、连接于水平加强件与刀具系统之间的下连杆;连接器的两端分别与上基座和下基座铰接;上基座、上连杆的数量≥2,下基座、下连杆的数量≥1,连接器的数量≥4。
4、优选的,上述连接器具有非刚性结构,可轴向拉伸或压缩变形并具有弹性恢复力;所述连接器包括弹簧、弹性阻尼器。
5、优选的,上述下基座与上连杆铰接部位的后侧设有限制上连杆向后旋转的限位器。
6、优选的,上述刀具系统的刀具阵列包括横向水平布置和纵向垂直布置;若上述刀具系统中的刀锯阵列为横向水平布置,上述下连杆的数量≥2;若上述刀具系统中的刀锯阵列为纵向垂直布置,上述下连杆的数量为1。
7、优选的,上述下连杆具有由直线和圆弧组合而成的后“凹”轮廓形状。
8、优选的,对于刀锯阵列为横向水平布置的刀具系统,上述刚性连接架与刀具系统之间设有倾转关节,倾转关节内置用以驱动刀具系统前后俯仰并锁定角度位置的机器人关节电机或伺服作动器。
9、优选的,上述悬挂机构与飞行平台之间设有可将两者分离或挂接的脱钩装置;所述脱钩装置包括安装于飞行平台下方的脱钩上组件、安装于悬挂架上方的脱钩下组件;所述脱钩上组件包括中间的上脱钩件和位于两侧对称的上定位件;所述脱钩下组件包括中间的下脱钩件和位于两侧对称的下定位件;所述上脱钩件与下脱钩件形成可分离的“挂钩-挂扣”式配合连接,所述下定位件具有向上的“外凸”形状,所述上定位件的下端具有与下定位件的“外凸”形状相配合的“内凹”外形。
10、优选的,上述上脱钩件包括中空的上脱钩基座、固定于上脱钩基座且输出杆向下的直线舵机、固连于直线舵机输出杆下端的轴承架、固连于上脱钩基座的挂钩轴、以挂钩轴为转轴呈倒“l”形的挂钩、安装于上脱钩基座和挂钩的横向杆末端之间且能为挂钩提供恢复力矩的拉簧,轴承架的下端设有推动挂钩旋转的轴承;所述挂钩的下端设有向内的弯钩,弯钩的末端下侧呈斜角外形;上述下脱钩件设有配合挂钩的方孔,一旦挂钩下端的弯钩旋入方孔即可使下脱钩件与挂钩形成可靠挂接;所述直线舵机收到“分离”或“挂接”指令后将驱动输出杆伸长或收缩,通过轴承架带动轴承向下或向上运动,使挂钩旋转退出或进入下脱钩件的方孔,从而实现悬挂机构与飞行平台的分离或挂接。
11、优选的,上述飞行平台为可悬停飞行器,包括左右对称布局的多旋翼飞行器,不局限于任意固定已知的四、六、八等多旋翼。
12、优选的,上述水平加强件为中空的舱体结构。
13、优选的,上述刀具系统中的刀锯为圆盘锯或链锯。
14、一种采用刚柔混合悬挂机构的飞行机器人的起飞与降落方法,具体如下:
15、1)飞行机器人的起飞方法:将由飞行平台、悬挂机构和刀具系统自上而下依次连接而成的飞行机器人放置于地面,由于刚性连接架相对柔性浮动台具有前后旋转自由度,刚性连接架与刀具系统所形成的组合体呈水平“卧倒”姿态;当飞行机器人起飞时,飞行平台缓慢升高并向刀具系统方向移动,带动组合体的上连杆端围绕刀具系统与地面形成的支点向上转动抬升,使组合体逐渐变为竖直姿态;当该组合体与地面完全垂直时,飞行机器人脱离地面,起飞完成。
16、2)飞行机器人的降落方法:当飞行机器人降落时,先缓慢将刀具系统的底端触碰地面以形成支点,然后操控飞行平台缓慢向后向下斜向飞行,由于刚性连接架相对柔性浮动台具有前后旋转自由度,在地面支点摩擦力的作用下,刚性连接架与刀具系统所形成的组合体逐渐向后倾倒,组合体的上连杆端缓慢下降,当组合体呈水平“卧倒”姿态时,飞行平台降落至地面,降落完成。
17、一种采用刚柔混合悬挂机构的飞行机器人在进行树障清理时的清障状态感知与控制方法,具体如下:
18、在刀具系统中为每个刀锯安装感知其物理状态的传感器,包括电流传感器、转速传感器和温度传感器,并在树障清理时进行如下控制:
19、1)数据采集:设刀锯数量k为正偶数,实时采集刀锯j(j=1,2,…,k)的物理数据:电流ij、转速nj、温度tj、电流变化率转速变化率温度变化率
20、2)计算刀锯j(j同上)的工作强度:
21、
22、式中,f为映射函数。若f取线性函数,则有
23、
24、其中,
25、
26、
27、
28、
29、
30、式中的ij0、nj0、tj0为刀锯j空载状态下的电流、转速、温度,k1~k6为加权系数。
31、3)计算左侧所有刀锯工作强度之和al、右侧所有刀锯工作强度之和ar:
32、
33、4)刀锯工作状态判断:
34、设置ij,nj,tj,aj所对应的异常阈值thi,thn,tht,tha已知且均≥0;所述异常包括刀锯过流、低速或卡阻、过热。
35、①若aj≤δ1,δ1>0为不灵敏区,说明刀锯j为空载,没有发生切割;若al≤δ2或ar≤δ2,δ2>0为不灵敏区,说明左侧刀锯或右侧刀锯为空载,没有树木切割;
36、②若ij≥thi,或nj≤thn,或tj≥tht,或或或或aj≥tha,可判定刀锯j工作异常;尤其当nj≤δ3时,δ3>0为不灵敏区,可判定刀锯j卡阻;
37、③若δa=|al-ar|>thδa,thδa>0为不平衡的门限,可判定刀具系统两侧切割作业不平衡。
38、5)刀具系统与飞行平台控制策略:
39、①对于两侧刀锯空载,给出并维持飞行平台前进指令,以形成切割进给;
40、②对于刀锯工作异常,刀具系统立即向飞行平台发送悬停指令以暂停切割进给;然后持续判断刀锯工作状态的变化:若刀锯工作状态恢复正常,则继续切割进给;若在预定的时间内刀锯工作状态依然为异常,则同以下刀锯卡阻处理;
41、③对于刀锯卡阻,则令所有刀锯反转再刹车,同时向飞行平台发送退出指令;若刀锯被树枝卡住且难以挣脱,则启动脱钩装置使刀具系统脱离飞行平台,从而最大限度地保护飞行机器人的安全,避免引发坠机;
42、④对于刀具系统两侧切割不平衡,为防止不平衡带来航向过度扰动,令飞行平台的控制系统加大航向保持的控制量,同时维持预定的前进指令。
43、本发明的有益效果:与现有技术相比,本发明的效果如下:
44、1)本发明通过一种刚柔混合悬挂机构将多个刀锯组合而成的刀具系统连接于飞行平台的下方,所构成的飞行机器人适合于对树障的顶部与侧面实施平推式的快速清理,作业效率高,避免作业人员靠近树障和高压输电线,操作更加安全,解决了现有技术中存在的作业效率低、安全风险大的问题;
45、2)通过刚柔混合悬挂机构将刀具系统下挂于飞行平台,可使飞行机器人的重心始终处于飞行平台的正下方,确保了飞行机器人的静稳定性与操作安全性;
46、3)连接器具有非刚性结构且数量≥4,其两端分别与上基座和下基座铰接,所构成的柔性浮动平台属于带阻尼的多点平衡连接结构,使得下基座相对上基座具有适度的水平、垂直及旋转方向的运动裕度,从而有效隔离或降低刀具系统的强烈振动对飞行平台的影响,改善机器人的飞行稳定性与操控特性,降低切割阻力、树木运动等因素对系统的影响,提高飞行机器人的环境适应能力,提升清障作业的效率与流畅度;
47、4)刚性连接架与柔性浮动平台之间存在着前后旋转自由度,在飞行机器人起降过程中,刚性连接架与刀具系统所形成的刚性组合体,可在水平“卧倒”与竖直姿态之间自然转换,彻底解决了悬挂载荷类飞行机器人因载荷尺寸过大而难以起降的问题,改善了系统使用的便利性。
48、5)当飞行机器人向前运动并实施树障切割时,下基座设置的限位器将限制上连杆向后旋转,使悬挂机构除连接器以外的结构呈现较大的刚性,有效防止刀具系统在切割过程中的后摆退让,从而为切割作业提供足够的前向进给力。
49、6)下连杆具有的后“凹”的轮廓形状,有利于悬挂机构避开斜向生长树枝,从而使刀锯与目标树枝直接接触并形成切割,解决迎面的斜向生长树枝对直线形下连杆易形成的运动阻碍问题。
50、7)在刚性连接架与刀具系统之间设置倾转关节,有利于根据树枝斜向生长的态势动态倾转刀具系统到合适角度,实现对树障枝条的快速切割清理,从而进一步提升机器人的清障效率与环境适应能力。
51、8)当发生枝叶缠绕刀具系统或刀锯卡阻等情况而造成飞行机器人无法进退时,可人工或自动启用脱钩装置,使悬挂机构与飞行平台快速“脱离”,从而保障飞行平台的安全,最大限度地降低故障带来的损失。
52、9)上脱钩件与下脱钩件形成可控制的单挂点式“挂钩-挂扣”连接,彻底解决了多挂点式脱钩装置因释放不同步而带来的脱钩卡阻甚至失败的问题;同时,上定位件与下定位件的“凸-凹”配合,形成了悬挂机构相对飞行平台的防旋转错位机制。
53、10)水平加强件用于刚性连接架与刀具系统所构成框架的结构强度;同时,其中空的舱体结构可用于装载刀具电池、控制器等模块,有利于将整机重心维持在飞行平台下方相对合适的位置,在确保飞行机器人静稳定性的同时兼顾操控性。
54、11)刀具系统包含左右几何对称或质量对称布置的多个刀锯的阵列组合,具有较大的水平或垂直作业幅面,作业范围较大,切割树枝效率较高;其中,横向水平布置的横列刀锯适合于树障削顶作业,纵向垂直布置的纵列刀锯适合于树障侧枝清理。
55、12)所提出的树障清理飞行机器人清障状态感知与控制方法,可对树障清理状态进行全面地感知与判断,从而对刀具系统和飞行平台进行高效精准控制,确保清障作业的稳定性、安全性与高效性。
本文地址:https://www.jishuxx.com/zhuanli/20240722/222915.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。