一种基于路径规划的微小卫星姿态机动控制方法
- 国知局
- 2024-08-01 06:13:25
本发明属于航天控制,尤其涉及一种基于路径规划的微小卫星姿态机动控制方法。
背景技术:
1、近年来,微小卫星由于具有质量轻、体积小、发射方式灵活、研制周期短和成本低等优势,在空间应用领域发挥越来越重要的作用。在此背景下,以盘绕式伸展臂为代表的空间展开机构越来越多地应用到卫星平台上以扩展其功能,盘绕式伸展臂作为一种典型的一维柔性展开机构,具有质量轻、功耗小、展开收拢比大(最高可达20:1)等优点,这对于星上资源有限的微小卫星十分重要,应用前景广阔。
2、含盘绕式伸展臂的微小卫星是指利用柔性伸展臂实现卫星与有效载荷的连接,卫星平台、盘绕式伸展臂和有效载荷三者构成一个刚柔耦合系统。此类卫星在天文观测、空间环境探测和新材料空间暴露试验研究等方面具有广阔的应用前景。由于卫星刚体与盘绕式伸展臂高度耦合,卫星姿态机动过程中非常容易引起盘绕式伸展臂的振动,进而影响卫星平台的稳定性和末端有效载荷的控制精度。盘绕式伸展臂不同于太阳帆板和大型天线等柔性附件,其以悬臂的方式将卫星平台与末端有效载荷连接起来,形成刚体—柔性附件—刚体的耦合系统(即刚柔耦合系统),在卫星姿态机动过程中盘绕式伸展臂的动力学特征表现为强非线性和多变量耦合,对卫星姿态机动控制来说是一个全新的挑战。但国内针对含盘绕式伸展臂的微小卫星在姿态机动控制领域的研究较少,目前没有提出切实有效的控制方法。
3、本发明设计了一种基于路径规划的微小卫星姿态机动控制方法,以期有效抑制盘绕式伸展臂的柔性振动,并保证卫星姿态机动控制精度。
技术实现思路
1、本发明实施例的目的在于提供一种基于路径规划的微小卫星姿态机动控制系统,通过设计姿态机动路径和采用基于辅助补偿器的滑模控制率,可有效抑制盘绕式伸展臂的柔性振动,并保证卫星姿态控制精度,以解决上述背景技术提到的问题。
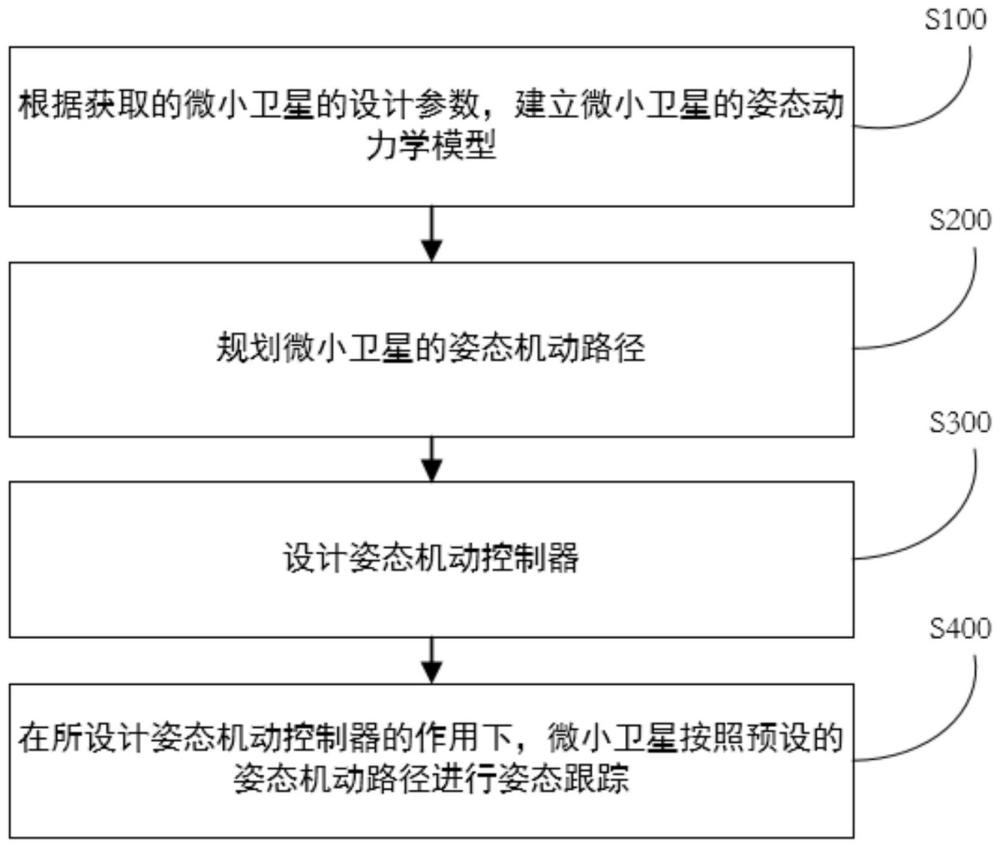
2、本发明实施例是这样实现的,一种基于路径规划的微小卫星姿态机动控制方法,该微小卫星由级联的卫星平台、盘绕式伸展臂和末端有效载荷组成,所述方法包括:
3、根据获取的微小卫星的设计参数,建立微小卫星的姿态动力学模型;
4、规划微小卫星的姿态机动路径;
5、设计姿态机动控制器;
6、在所设计姿态机动控制器的作用下,微小卫星按照预设的姿态机动路径进行姿态跟踪。
7、本发明实施例提供的一种基于路径规划的微小卫星姿态机动控制方法,以含盘绕式伸展臂的微小卫星为特定对象,建立了一种针对刚体—柔性附件—刚体的刚柔耦合多体卫星动力学模型,该模型充分考虑了盘绕式伸展臂的结构力学特性,保证了模型的可靠性和准确性;在姿态机动路径规划基础上,所设计的基于上下限时间固定的姿态机动路径可有效减小系统前三阶模态的最大幅值和所定义的内部振动干扰的最大幅值,加快系统前三阶模态和内部振动干扰进入误差带的时间,即大大减小激起的盘绕式伸展臂振动;同时在此基础上,所提出的基于补偿器的滑模控制器,可在有限时间内抑制刚柔耦合项、非线性动态项、参数摄动项和外界干扰项对闭环控制系统的影响,提高姿态控制精度。
技术特征:1.一种基于路径规划的微小卫星姿态机动控制方法,该微小卫星由级联的卫星平台、盘绕式伸展臂和末端有效载荷组成,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据获取的微小卫星的设计参数,建立微小卫星的姿态动力学模型的步骤中,利用拉格朗日力学方程建立微小卫星的姿态动力学模型。
3.根据权利要求2所述的方法,其特征在于,所述姿态动力学模型的误差动力学方程为:
4.根据权利要求1所述的方法,其特征在于,所述规划微小卫星的姿态机动路径的步骤,包括:
5.根据权利要求3所述的方法,其特征在于,所述姿态机动控制器,满足:
6.根据权利要求5所述的方法,其特征在于,所述标称控制器,满足:
7.根据权利要求5所述的方法,其特征在于,所述补偿器根据非线性观测器设定,该非线性观测器,满足:
技术总结本发明适用于航天控制技术领域,提供了一种基于路径规划的微小卫星姿态机动控制方法,所述方法包括:根据获取的微小卫星的设计参数,建立微小卫星的姿态动力学模型;规划微小卫星的姿态机动路径;设计姿态机动控制器;在所设计姿态机动控制器的作用下,微小卫星按照预设的姿态机动路径进行姿态跟踪。本发明中建立了刚体—柔性附件—刚体耦合系统的姿态动力学模型,所设计的姿态机动路径和姿态机动控制器可有效抑制盘绕式伸展臂的振动,提高了微小卫星姿态控制精度。技术研发人员:孙亮,赵泽林,牛晓洁,黄海,陈珅艳,王鹏程,郭艳受保护的技术使用者:北京航空航天大学技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240722/222917.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。