一种具有河道表面清理装置的无人机的制作方法
- 国知局
- 2024-08-01 06:13:31
本技术涉及无人机,尤其是涉及一种具有河道表面清理装置的无人机。
背景技术:
1、无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。无人机具有体积小、重量轻和可垂直起降的优点,因此被广泛的应用在各种领域,如河道清理领域。
2、无人机在河道清理领域中最常见的应用是监控,无人机在河道进行巡视,发现漂浮物时对指定的地点进行拍摄与定位,然后工作人员到达指定的位置进行打捞。但是这种方法对人工需求比较大。为了节省人工,研究人员在无人机上设置清理装置,对河道进行清理。
3、申请号为202210880685.8的中国专利公开了一种应用于河道垃圾清理的可重构无人机,其公开了在壳体底板的下表面安装有能够伸缩的伸缩臂,伸缩臂的末端安装有抓取组件;无人机移动至漂浮垃圾的正上方时,伸长伸缩臂,使抓取组件靠近并抓取漂浮垃圾,然后收缩伸缩臂,使无人机和漂浮垃圾一起移动至岸边,完成河道漂浮垃圾的清理,所以提供了一种具有抓取功能且操作臂能够伸缩的可重构无人机。虽然能够通过无人机对河道进行清理,但是每次清理抓取组件只能抓取一次垃圾,在河道垃圾较多时,需要进行多次往返。
4、申请号为201811419504.1的中国专利公开了一种城市河道清理用环卫无人机,其公开了设置有收集箱,本体在带动本发明进行移动时,水面上的垃圾能够被底板收集,并在重力的作用下滑落至底板后端,通过清理机构对本发明左右两侧的垃圾进行清理后,垃圾在导引框的导引作用下,落在底板上,便于清理工作完成后,工作人员对垃圾进行统一处理,解决了需要多次往返清理的问题。
5、上述中的现有技术方案存在以下缺陷:若河道中存在水草,需要对水草进行清理或者垃圾被水草纠缠,则无法顺利的进行清理。
技术实现思路
1、本技术为了对河道中的水草以及水草中的垃圾进行自动化清理,提供了一种具有河道表面清理装置的无人机。
2、本技术的上述技术目的是通过以下技术方案得以实现的:
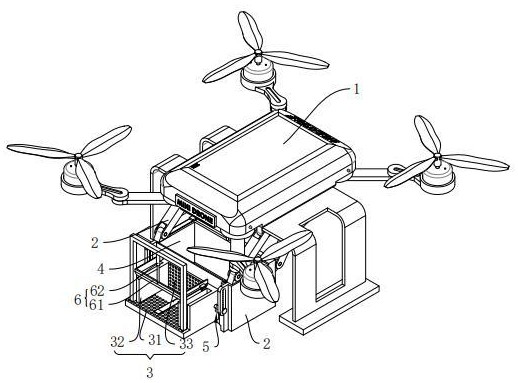
3、一种具有河道表面清理装置的无人机,包括无人机本体与设置在无人机本体上的清理装置,所述清理装置包括:
4、连接架,设置在无人机本体下方;
5、清理斗,设置在连接架上,所述清理斗包括底板、设置在底板上的后板以及两个设置在底板上的侧板;清理斗呈一侧以及顶部为开口的结构;底板延伸至两个侧板外侧以及侧板远离后板一侧;
6、切割组件,设置在连接架上,所述切割组件包括相对于清理斗竖直滑动设置的切割刀以及驱动切割刀移动的第一驱动件;随着切割刀的移动,切割刀能够与底板延伸至两个侧板外侧以及侧板远离后板一侧抵接。
7、通过采用上述方案,清理的垃圾在水草中或者需要清理水草时,无人机本体飞行使得清理斗的底板进入水面下,然后带动清理斗逆流移动,使得水草位于清理斗内,然后启动第一驱动件带动切割刀下降直至切割刀与底板接触,切割刀将水草切断,使得水草被清理斗收集。
8、进一步的,所述清理装置还包括收集箱,收集箱设置在连接架上;清理斗转动设置在连接架上,随着清理斗的转动,清理斗内的垃圾能够倒入收集箱内;连接架上设置有驱动清理斗转动的倾倒组件。
9、通过采用上述技术方案,清理斗收集垃圾后,可以将垃圾倒入收集箱内,然后再次进行垃圾清理工作,不必清理一次就要回到岸边倒一次垃圾,大大提高清理效率。
10、进一步的,所述收集箱竖直滑动连接于连接架,所述倾倒组件包括第二驱动件、齿轮以及与齿轮啮合的齿条,第二驱动件连接在连接架上驱动收集箱滑动,齿条固定连接在收集箱外,齿轮转动连接在连接架上,齿轮相对于清理斗固定设置,齿轮转动带动清理斗转动。
11、通过采用上述技术方案,清理斗收集垃圾时收集箱位于水面以上,避免收集箱内进水。清理斗收集垃圾后,启动第二驱动组件带动收集箱下降,收集箱带动齿条移动,齿条驱动齿轮转动,齿轮带动清理斗翻转转动,将清理斗内的垃圾倒入收集箱内。
12、进一步的,所述底板上连接有延伸架,延伸架向靠近无人机本体方向延伸,第一驱动件设置在延伸架上,使得切割刀与底板接触时,第一驱动件能够位于清理斗上方。
13、通过采用上述技术方案,使得切割刀可以随清理斗转动,且第一驱动组件始终位于水面上方,避免第一驱动件被水浸泡。
14、进一步的,所述底板上设置有拨片,底板上设置有与拨片吸附配合的第一磁铁,切割刀上设置有与拨片吸附配合的第二磁铁,第一磁铁对拨片的吸附作用大于第二磁铁对拨片的吸附作用;第一磁铁上设置有调节组件;所述调节组件包括第一转杆、第二转杆以及中间块,中间块竖直滑动连接于底板,第一转杆与第二转杆分别位于中间块两侧,且第一转杆与第二转杆均铰接于中间块,第一转杆以及第二转杆均转动连接于底板,转动轴线水平;第一磁铁设置于第二转杆上、位于轴线远离中间块一侧;切割刀下降过程中能够与第一转杆远离中间块一侧抵接。
15、通过采用上述技术方案,切割刀下降时,切割刀向下压感应块,使得第一转杆远离中间块一端降低,另一端带动中间块上升,中间块带动第二转杆靠近中间块一端上升,第二转杆另一端带动第一磁铁下降与拨片分离。此时第一磁铁对拨片的吸附作用消失,拨片与第二磁铁吸附,切割刀带动拨片上升,将清理斗内的水草带出,保证清理斗内水草可以完全倒入收集箱内。切割刀带动拨片下降时,因为此时第一磁铁高度高于感应块且第一磁铁对拨片的吸力大于第二磁铁,在拨片还为降落至于第一磁铁抵接时,第一磁铁就可以将拨片从第二磁铁上吸下,使得拨片复位。
16、进一步的,所述切割刀上设置有缓冲组件,所述缓冲组件包括弹性件与缓冲杆,缓冲杆竖直滑动连接于切割刀,缓冲杆与第一转杆抵接;弹性件设置于缓冲杆与切割刀之间,驱动缓冲杆向远离切割刀方向移动。
17、通过采用上述技术方案,将弹性件的弹性系数设置为,割刀下降过程中,缓冲杆与感应块抵接,刚抵接前期,不会推动感应块下降,弹性件被压缩,随着弹性件的逐渐压缩,感应块也被逐渐推动。这样使得切割刀带动拨片上升时,在切割刀移动初期,因为弹性件的推挤,感应块不会马上复位,保证第一磁铁不会对拨片产生吸附作用。另外,切割刀带动拨片复位时,使得第一磁铁在感应块发生移动前就对拨片进行吸附。
18、进一步的,所述底板内设置有隐藏槽,第一转杆、第二转杆以及中间块位于隐藏槽内,底板上开设有两个通孔,第一转杆以及第二转杆远离中间块一端分别对通孔对应,第一磁铁位于与第二转杆对应的通孔内,第一转杆远离中间块一端设置有感应块,感应块位于与第一转杆对应的通孔内。
19、进一步的,所述连接架与无人机本体转动连接,转动轴线水平。
20、通过采用上述技术方案,完成清理工作降落时,清理斗先于起落架与地面接触,然后随着无人机本体的继续降落,连接架与无人机本体发现转动,保证起落架可以落地。
21、综上所述,本技术具有以下技术效果:
22、1.通过设置了切割组件与清理斗配合,在清理河道内水草或者位于水草内的垃圾时,切割组件将水草切断,然后被清理斗清理,实现对河道中的水草以及水草中的垃圾的自动化清理;
23、2.通过设置收集箱与倾倒组件,使得清理斗收集垃圾时收集箱位于水面以上,避免收集箱内进水。清理斗收集垃圾后,倾倒组件驱动清理斗将垃圾倒入收集箱内,大大提高清理效率;
24、3.通过设置了拨片与调节组件,保证将清理斗内垃圾更加完全的倒入收集箱内。
本文地址:https://www.jishuxx.com/zhuanli/20240722/222927.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表