基于分布式旋翼的空间运动机构重力补偿装置及补偿方法
- 国知局
- 2024-08-01 06:13:25
本发明涉及复杂航天器产品的地面实验模拟领域,具体为一种基于分布式旋翼的空间运动机构重力补偿装置及补偿方法。
背景技术:
1、随着科学技术的发展,空间机器人在人类探索太空活动中发挥着越来越重要的作用,不仅可以协助或者代替宇航员执行空间站组装、维修、部件更换等传统在轨操作,还可以执行燃料补给、航天器监视与捕获等新型在轨操作。鉴于这些航天任务的代价高度昂贵及地位特殊重要等特点,必须要求其具有相当高的安全性和可靠性。因此,在地面预先进行各种航天设备的仿真试验以及人员的操作训练等是必不可少的研究阶段,所以地面零(微)重力环境模拟技术在整个航天工程体系中有着不可或缺的地位。传统的微重力模拟方法包括落塔法、水浮法、悬吊法和气浮法。然而落塔法造价高昂,模拟时间短;水浮法流体阻力会影响被试设备的动力学特性,且对被试设备密封性要求较高;悬吊法模拟精度不高、占用空间大且易产生干涉;气浮法难以实现竖直方向微重力模拟。因此急需一种全新的重力补偿设计方案与装置。
技术实现思路
1、本发明为了解决上述提到的传统微重力模拟方法造价高昂,模拟时间短,装置占地面积大、影响被试设备动力学特性的问题,特此提出了一种基于分布式旋翼的空间运动机构重力补偿装置及补偿方法。本发明采用旋翼的升力进行重力补偿,模拟微重力环境,具有机构体积小,模拟时间长,占地面积小,使用方便的优点。
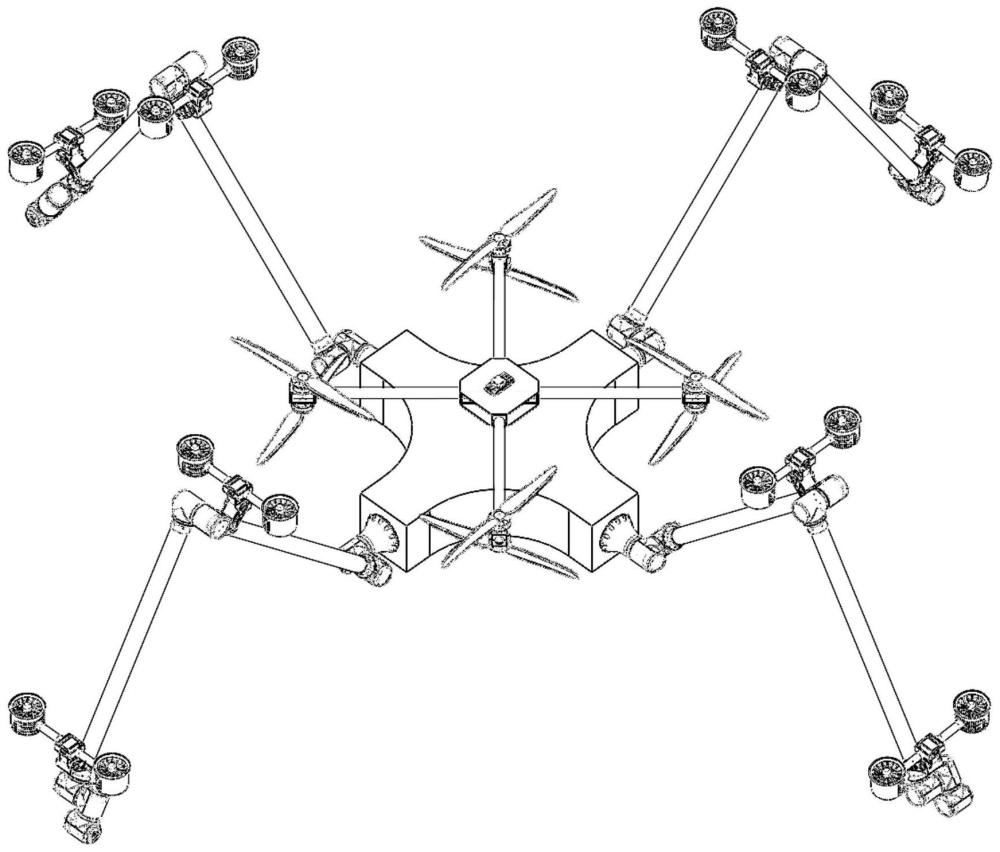
2、本发明提出了一种基于分布式旋翼的空间运动机构重力补偿装置,其具体包括若干涵道风扇重力补偿装置、旋翼式重力补偿装置和空间运动机构,空间运动机构包括基座模块和若干臂杆模块,基座模块四周均匀设置有若干臂杆模块;基座模块上设置有旋翼式重力补偿装置;臂杆模块包括大臂和小臂,基座模块、大臂和小臂依次连接;大臂和小臂上均设置有一个涵道风扇重力补偿装置;涵道风扇重力补偿装置包括涵道风扇模块、方向舵机模块和控制模块一,方向舵机模块、涵道风扇模块和控制模块一由下往上依次连接,并且控制模块一分别和涵道风扇模块以及方向舵机模块信号连接。
3、更进一步地,所述涵道风扇模块包括两个风扇,两个风扇的旋转方向相反。
4、更进一步地,所述方向舵机模块包括两个舵机和拉力传感器,两个舵机和拉力传感器均与涵道风扇模块连接,两个舵机之间正交设置。
5、更进一步地,所述控制模块一内部设置有陀螺仪和加速度计。
6、更进一步地,所述涵道风扇重力补偿装置还包括转接模块,方向舵机模块下端通过转接模块和臂杆模块连接。
7、更进一步地,所述旋翼式重力补偿装置和基座模块通过万向节连接。
8、更进一步地,所述旋翼式重力补偿装置包括旋翼模块、机身模块和控制模块二,旋翼模块包括若干对旋翼,机身模块四周均匀设置有若干对旋翼;机身模块下端和基座模块连接,机身模块上设置有控制模块二,控制模块二和旋翼模块信号连接。
9、更进一步地,所述控制模块二内部设置有陀螺仪和加速度计。
10、更进一步地,所述臂杆模块还包括肩关节、肘关节和腕关节,大臂通过肩关节和基座模块连接,大臂和小臂之间通过肘关节连接,小臂末端设置有腕关节;肩关节、肘关节和腕关节均设置有若干电机。
11、一种用于上述的基于分布式旋翼的空间运动机构重力补偿装置的重力补偿方法,包括以下步骤:
12、步骤一、对空间运动机构的质量特性进行测量,得到期望升力的数值和方向;
13、步骤二、控制模块一对涵道风扇模块的实际升力以及实际升力方向进行测量;
14、步骤三、根据期望升力,控制模块一对涵道风扇模块风扇的转速进行调节;控制模块一通过方向舵机模块对涵道风扇模块的升力方向进行调整。
15、本发明所述的一种基于分布式旋翼的空间运动机构重力补偿装置及补偿方法的有益效果为:
16、(1)本发明所述的一种基于分布式旋翼的空间运动机构重力补偿装置及补偿方法,克服了传统微重力模拟方法造价高昂,模拟时间短,装置占地面积大、影响被试设备动力学特性的问题,通过旋翼的升力对被试设备进行重力补偿,并通过分布式的设置,加强了被试机构大范围运动时重力补偿装置的耦合效果,补偿重力和升力的偏心力矩;
17、(2)本发明所述的一种基于分布式旋翼的空间运动机构重力补偿装置及补偿方法,通过模块化的设计,可以针对不同被试设备灵活调整机构配置,可以为更大型的被试机构提供微重力环境;
18、(3)本发明所述的一种基于分布式旋翼的空间运动机构重力补偿装置及补偿方法,通过拉力传感器测量风扇提供的升力大小,陀螺仪和加速度计测量并计算得到实际升力方向,根据期望升力的大小和方向,通过舵机对旋翼的方向进行实时调整,通过控制模块对旋翼的转速进行实时调整,实现对空间运动机构的微重力模拟。
技术特征:1.一种基于分布式旋翼的空间运动机构重力补偿装置,其特征在于:包括若干涵道风扇重力补偿装置(1)、旋翼式重力补偿装置(2)和空间运动机构(3),空间运动机构(3)包括基座模块(11)和若干臂杆模块(12),基座模块(11)四周均匀设置有若干臂杆模块(12);基座模块(11)上设置有旋翼式重力补偿装置(2);臂杆模块(12)包括大臂(14)和小臂(16),基座模块(11)、大臂(14)和小臂(16)依次连接;大臂(14)和小臂(16)上均设置有一个涵道风扇重力补偿装置(1);涵道风扇重力补偿装置(1)包括涵道风扇模块(4)、方向舵机模块(5)和控制模块一(7),方向舵机模块(5)、涵道风扇模块(4)和控制模块一(7)由下往上依次连接,并且控制模块一(7)分别和涵道风扇模块(4)以及方向舵机模块(5)信号连接。
2.根据权利要求1所述的基于分布式旋翼的空间运动机构重力补偿装置,其特征在于:所述涵道风扇模块(4)包括两个风扇,两个风扇的旋转方向相反。
3.根据权利要求1所述的基于分布式旋翼的空间运动机构重力补偿装置,其特征在于:所述方向舵机模块(5)包括两个舵机和拉力传感器,两个舵机和拉力传感器均与涵道风扇模块(4)连接,两个舵机之间正交设置。
4.根据权利要求1所述的基于分布式旋翼的空间运动机构重力补偿装置,其特征在于:所述控制模块一(7)内部设置有陀螺仪和加速度计。
5.根据权利要求1-4任一项所述的基于分布式旋翼的空间运动机构重力补偿装置,其特征在于:所述涵道风扇重力补偿装置(1)还包括转接模块(6),方向舵机模块(5)下端通过转接模块(6)和臂杆模块(12)连接。
6.根据权利要求1所述的基于分布式旋翼的空间运动机构重力补偿装置,其特征在于:所述旋翼式重力补偿装置(2)和基座模块(11)通过万向节连接。
7.根据权利要求1或6所述的基于分布式旋翼的空间运动机构重力补偿装置,其特征在于:所述旋翼式重力补偿装置(2)包括旋翼模块(8)、机身模块(9)和控制模块二(10),旋翼模块(8)包括若干对旋翼,机身模块(9)四周均匀设置有若干对旋翼;机身模块(9)下端和基座模块(11)连接,机身模块(9)上设置有控制模块二(10),控制模块二(10)和旋翼模块(8)信号连接。
8.根据权利要求7所述的基于分布式旋翼的空间运动机构重力补偿装置,其特征在于:所述控制模块二(10)内部设置有陀螺仪和加速度计。
9.根据权利要求1所述的基于分布式旋翼的空间运动机构重力补偿装置,其特征在于:所述臂杆模块(12)还包括肩关节(13)、肘关节(15)和腕关节(17),大臂(14)通过肩关节(13)和基座模块(11)连接,大臂(14)和小臂(16)之间通过肘关节(15)连接,小臂(16)末端设置有腕关节(17);肩关节(13)、肘关节(15)和腕关节(17)均设置有若干电机。
10.一种用于权利要求1所述的基于分布式旋翼的空间运动机构重力补偿装置的重力补偿方法,其特征在于:包括以下步骤:
技术总结本发明公开了一种基于分布式旋翼的空间运动机构重力补偿装置及补偿方法,涉及复杂航天器产品的地面实验模拟领域,解决了传统微重力模拟方法造价高昂,模拟时间短,装置占地面积大、影响被试设备动力学特性的问题。本发明空间运动机构包括基座模块和若干臂杆模块,基座模块四周设置有臂杆模块;基座模块上设有旋翼式重力补偿装置;臂杆模块包括大臂和小臂,大臂和小臂上设置有涵道风扇重力补偿装置;涵道风扇重力补偿装置包括涵道风扇模块、方向舵机模块和控制模块一,控制模块一分别和涵道风扇模块以及方向舵机模块信号连接。本发明采用旋翼的升力进行重力补偿,模拟微重力环境,具有机构体积小,模拟时间长,占地面积小,使用方便的优点。技术研发人员:魏承,宋宇宁,曹喜滨受保护的技术使用者:哈尔滨工业大学技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240722/222918.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表