一种采用柔性桨毂的共轴双旋翼无人直升机的制作方法
- 国知局
- 2024-08-01 06:14:08
本发明属于航空飞行器相关,具体为一种采用柔性桨毂的共轴双旋翼无人直升机。
背景技术:
1、共轴式布局的直升机上有两个共轴旋翼,分别向相反方向旋转。这两个旋翼可以平衡反力矩和回转力矩,旋翼升力系统的上、下旋翼桨毂分别固定在两个向相反方向旋转的轴上,上、下旋翼设置水平铰、垂直铰和轴向铰。其结构复杂,相应的操纵系统也较为复杂。
2、因此,针对以上现状,迫切需要提供一种采用柔性桨毂的共轴双旋翼无人直升机,以克服当前实际应用中的不足。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本发明提供一种采用柔性桨毂的共轴双旋翼无人直升机,有效解决了上述背景技术中的问题。
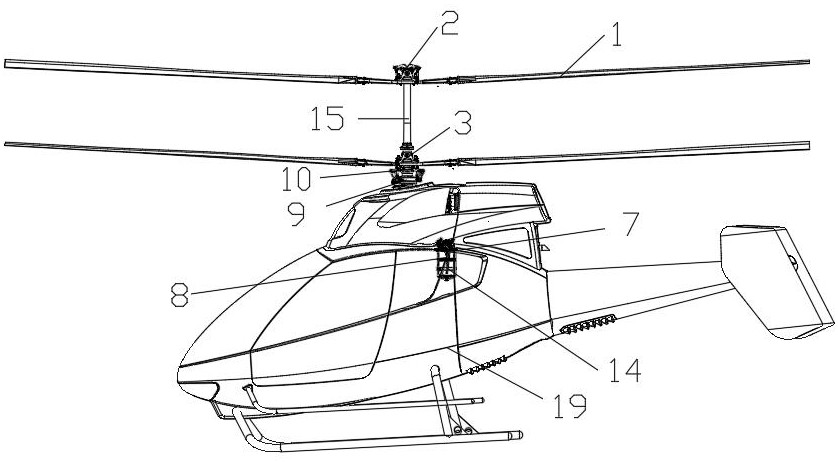
2、为实现上述目的,本发明提供如下技术方案:一种采用柔性桨毂的共轴双旋翼无人直升机,包括机身、起落架和尾翼,起落架设置于机身底部,尾翼设置于机身的尾部,所述机身上还设置有旋翼系统、操纵系统、传动系统、动力系统以及航电飞控系统,所述传动系统用于动力系统与旋翼系统之间的动力传递;
3、所述旋翼系统包括导向装置轴以及设置于导向装置轴上的上旋翼柔性桨毂和下旋翼柔性桨毂,所述导向装置轴设置于机身上,上旋翼柔性桨毂和下旋翼柔性桨毂上均设置有旋翼桨叶;
4、所述操纵系统包括舵机、操纵连杆、上旋翼自动倾斜器和下旋翼自动倾斜器,所述舵机和操纵连杆均设置有多组,舵机与上旋翼柔性桨毂之间通过上旋翼自动倾斜器和操纵连杆连接,舵机与下旋翼柔性桨毂之间通过下旋翼自动倾斜器和操纵连杆连接。
5、作为本技术方案的进一步优化,所述上旋翼柔性桨毂包括复材扭杆、水平铰和挥舞限动器,所述水平铰与导向装置轴相连接,挥舞限动器通过复材扭杆与水平铰相连接,所述上旋翼柔性桨毂和下旋翼柔性桨毂结构相同。
6、作为本技术方案的进一步优化,所述动力系统包括发动机、燃油箱、润滑系统、冷却系统和电气系统,所述发动机通过板式底座结构的发动机架安装于机身内,发动机的输出轴与传动系统相连接,所述燃油箱位于发动机正下方,且燃油箱经燃油泵加压后向发动机供油。
7、作为本技术方案的进一步优化,所述发动机采用四缸四冲程活塞式发动机,功率为100马力。
8、作为本技术方案的进一步优化,所述传动系统包括减速器和离合器减速器通过弹性橡胶阻尼接通式离合器连接发动机,离合器用于控制旋翼系统与减速器之间的连接状态。
9、作为本技术方案的进一步优化,所述航电飞控系统采用模块化的控制系统,航电飞控系统包括飞控模块、导航模块、数/图传模块和电源模块。
10、作为本技术方案的进一步优化,所述机身包括蒙皮和机身骨架,所述蒙皮覆盖于机身骨架上。
11、作为本技术方案的进一步优化,所述蒙皮采用碳纤维蜂窝壁板,蒙皮与机身骨架之间通过纵横框架连接固定,蒙皮上设有设备口盖,机身骨架采用构架式结构,由航空铝合金管焊接而成。
12、作为本技术方案的进一步优化,所述尾翼包括平尾和立尾,所述平尾固定于机身上,立尾固定于平尾的端部。
13、作为本技术方案的进一步优化,所述起落架包括横撬和纵撬,纵撬通过横撬与机身底部连接。
14、与现有技术相比,本发明的有益效果是:采用柔性桨毂的共轴双旋翼的无人直升机,柔性桨毂应用于共轴双旋翼的直升机属于一种创新设计,包含水平铰、挥舞限动器、复材扭杆,当旋翼转速大于150转/分时,挥舞限动器便不再限制旋翼桨叶的挥舞运动,复材扭杆省去垂直铰和轴向铰,降低旋翼系统复杂性,提供更好的操控性能,提高整机可靠性,减少维护成本;对应柔性桨毂的操纵系统采用一种全新的无人操纵系统,将上、下旋翼桨叶之间的拉杆等操纵系统部件设计在旋翼轴内,实现共轴轴内操纵,在上、下旋翼桨叶之间没有拉杆、摇臂或其它任何结构件,不会形成涡流,使气动阻力减小,整体气动得到优化;并且在总距和差动桨距机构中采用由摇臂和拉杆组成的四边形连杆叠加机构控制上下倾斜器沿轴向运动,减低了操纵系统连杆数量,降低操纵系统复杂性。
技术特征:1.一种采用柔性桨毂的共轴双旋翼无人直升机,包括机身、起落架和尾翼,起落架设置于机身底部,尾翼设置于机身的尾部,其特征在于,所述机身上还设置有旋翼系统、操纵系统、传动系统、动力系统以及航电飞控系统,所述传动系统用于动力系统与旋翼系统之间的动力传递;
2.根据权利要求1所述的采用柔性桨毂的共轴双旋翼无人直升机,其特征在于,所述上旋翼柔性桨毂(2)包括复材扭杆(4)、水平铰(5)和挥舞限动器(6),所述水平铰(5)与导向装置轴(15)相连接,挥舞限动器(6)通过复材扭杆(4)与水平铰(5)相连接,所述上旋翼柔性桨毂(2)和下旋翼柔性桨毂(3)结构相同。
3.根据权利要求1所述的采用柔性桨毂的共轴双旋翼无人直升机,其特征在于,所述动力系统包括发动机(18)、燃油箱(19)、润滑系统(20)、冷却系统(21)和电气系统(22),所述发动机(18)通过板式底座结构的发动机架安装于机身内,发动机(18)的输出轴与传动系统相连接,所述燃油箱(19)位于发动机(18)正下方,且燃油箱(19)经燃油泵加压后向发动机(18)供油。
4.根据权利要求3所述的采用柔性桨毂的共轴双旋翼无人直升机,其特征在于,所述发动机(18)采用四缸四冲程活塞式发动机,功率为100马力。
5.根据权利要求3所述的采用柔性桨毂的共轴双旋翼无人直升机,其特征在于,所述传动系统包括减速器(16)和离合器(17)减速器(16)通过弹性橡胶阻尼接通式离合器连接发动机(18),离合器(17)用于控制旋翼系统与减速器(16)之间的连接状态。
6.根据权利要求1所述的采用柔性桨毂的共轴双旋翼无人直升机,其特征在于,所述航电飞控系统采用模块化的控制系统,航电飞控系统包括飞控模块(23)、导航模块(24)、数/图传模块(25)和电源模块(26)。
7.根据权利要求1所述的采用柔性桨毂的共轴双旋翼无人直升机,其特征在于,所述机身包括蒙皮(27)和机身骨架(28),所述蒙皮(27)覆盖于机身骨架(28)上。
8.根据权利要求7所述的采用柔性桨毂的共轴双旋翼无人直升机,其特征在于,所述蒙皮(27)采用碳纤维蜂窝壁板,蒙皮(27)与机身骨架(28)之间通过纵横框架连接固定,蒙皮(27)上设有设备口盖,机身骨架(28)采用构架式结构,由航空铝合金管焊接而成。
9.根据权利要求1所述的采用柔性桨毂的共轴双旋翼无人直升机,其特征在于,所述尾翼包括平尾(29)和立尾(30),所述平尾(29)固定于机身上,立尾(30)固定于平尾(29)的端部。
10.根据权利要求1所述的采用柔性桨毂的共轴双旋翼无人直升机,其特征在于,所述起落架包括横撬(31)和纵撬(32),纵撬(32)通过横撬(31)与机身底部连接。
技术总结本发明涉及航空飞行器相关技术领域,且公开了一种采用柔性桨毂的共轴双旋翼无人直升机,包括机身、起落架和尾翼,起落架设置于机身底部,尾翼设置于机身的尾部,所述机身上还设置有旋翼系统、操纵系统、传动系统、动力系统以及航电飞控系统,所述传动系统用于动力系统与旋翼系统之间的动力传递;所述旋翼系统包括导向装置轴以及设置于导向装置轴上的上旋翼柔性桨毂和下旋翼柔性桨毂;所述操纵系统包括舵机、操纵连杆、上旋翼自动倾斜器和下旋翼自动倾斜器;本发明减低了操纵系统连杆数量,降低操纵系统复杂性。技术研发人员:董冉冉,王钊,王超,刘长环,乔绪耀受保护的技术使用者:申维航空装备(滨州)有限公司技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240722/222939.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。