一种具有分析姿态纠偏功能的飞行机器人的制作方法
- 国知局
- 2024-08-01 06:18:30
本技术涉及飞行器,具体涉及一种具有分析姿态纠偏功能的飞行机器人。
背景技术:
1、多旋翼飞行机器人是一种通过多旋翼提供升力,通过多旋翼的旋转配合实现对设别升空、飞行、旋转等各种姿态的控制;多旋翼飞行机器人操纵性强,操作简单,且飞行整体较为稳定。
2、如公开号为cn217074792u就公开了一种高稳定性飞行机器人,该装置通过多旋翼提供升力,多个飞行吸附动力单元成中心对称的方式布设在所述吸附腔体内,保证整体结构的重心平稳,保证飞行、吸附、和行走时的稳定性。
3、但是,飞行机器人整体遇到不平整的障碍或者突然增加的各项风力时易失稳,靠旋翼微调控制会来不及,且飞行机器人行动距离较远,若突然失联较难找回。
4、基于此,本实用新型设计了一种具有分析姿态纠偏功能的飞行机器人以解决上述问题。
技术实现思路
1、针对现有技术所存在的上述缺点,本实用新型提供了一种具有分析姿态纠偏功能的飞行机器人。
2、为实现以上目的,本实用新型通过以下技术方案予以实现:
3、一种具有分析姿态纠偏功能的飞行机器人,包括机体;
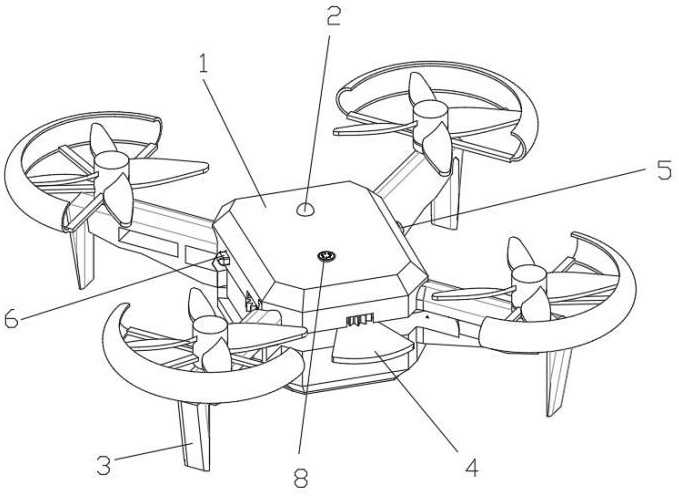
4、所述机体上固定安装有高度传感器、加速度传感器和姿态传感器,四个支架对称固定安装在机体的下侧;快速纠偏机构安装在机体的中部;
5、所述快速纠偏机构包括驱动组件和纠偏组件,驱动组件和纠偏组件安装在机体上;限位组件安装在驱动组件和机体上。
6、更进一步的,所述驱动组件包括电机、不完全齿轮和传动组件,电机固定安装在机体上,不完全齿轮转动安装在机体上,且电机的输出端与不完全齿轮固定连接,传动组件安装在机体上。
7、更进一步的,所述驱动组件的传动组件包括第一齿轮和第二齿轮,两个第一齿轮对称转动安装在机体的两侧,第一齿轮与不完全齿轮啮合连接;两个第二齿轮对称转动安装在机体的两端,第二齿轮与不完全齿轮啮合连接。
8、更进一步的,所述纠偏组件包括水平纠偏组件和竖直纠偏组件,水平纠偏组件和竖直纠偏组件安装在机体上。
9、更进一步的,所述纠偏组件的水平纠偏组件包括第一翼板和容纳槽,第一翼板与第一齿轮固定连接,第一翼板与机体转动连接,机体上开设有容纳第一翼板的容纳槽。
10、更进一步的,所述纠偏组件的竖直纠偏组件包括第二翼板和转动槽;第二翼板与第二齿轮固定连接,第二翼板与机体转动连接;机体上开设有容纳第二翼板的转动槽。
11、更进一步的,所述限位组件包括限位杆、滑块、弹簧、释放块,滑块与机体之间固定安装有弹簧,滑块与机体限位滑动连接,滑块上固定安装有限位杆,限位杆与第二齿轮和第一齿轮插接,释放块固定安装在不完全齿轮上,且释放块位于不完全齿轮的轮齿上侧;释放块与滑块限位滑动连接。
12、更进一步的,所述释放块的一端设置为利于滑块滑入的斜面。
13、更进一步的,所述高度传感器、快速纠偏机构、加速度传感器和姿态传感器均与操控台无线电连接。
14、更进一步的,所述机体上固定安装有便于装置失联时寻找定位的发烟器。
15、本实用新型具有以下技术效果:
16、1.本实用新型通过高度传感器监测飞行器高度,通过加速度传感器监测飞行器飞行状态,通过姿态传感器监测飞行器飞行姿态;在飞行姿态偏离原定姿态时,通过驱动组件驱动纠偏组件快速调节装置的水平或竖直的飞行姿态;通过支架避免装置在起飞或降落时机身与地面发生直接碰撞;
17、2.本实用新型在装置失控失联时,发烟器自动启动,通过发烟器喷出彩烟,便于操作人员寻找。
技术特征:1.一种具有分析姿态纠偏功能的飞行机器人,包括机体(1),其特征在于:
2.根据权利要求1所述的具有分析姿态纠偏功能的飞行机器人,其特征在于,所述驱动组件(41)包括电机(411)、不完全齿轮(412)和传动组件,电机(411)固定安装在机体(1)上,不完全齿轮(412)转动安装在机体(1)上,电机(411)的输出端与不完全齿轮(412)固定连接,传动组件安装在机体(1)上。
3.根据权利要求2所述的具有分析姿态纠偏功能的飞行机器人,其特征在于,所述驱动组件(41)的传动组件包括第一齿轮(413)和第二齿轮(414),两个第一齿轮(413)对称转动安装在机体(1)的两侧,第一齿轮(413)与不完全齿轮(412)啮合连接;两个第二齿轮(414)对称转动安装在机体(1)的两端,第二齿轮(414)与不完全齿轮(412)啮合连接。
4.根据权利要求3所述的具有分析姿态纠偏功能的飞行机器人,其特征在于,所述纠偏组件(42)包括水平纠偏组件和竖直纠偏组件,水平纠偏组件和竖直纠偏组件安装在机体(1)上。
5.根据权利要求4所述的具有分析姿态纠偏功能的飞行机器人,其特征在于,所述纠偏组件(42)的水平纠偏组件包括第一翼板(421)和容纳槽(423),第一翼板(421)与第一齿轮(413)固定连接,第一翼板(421)与机体(1)转动连接,机体(1)上开设有容纳第一翼板(421)的容纳槽(423)。
6.根据权利要求5所述的具有分析姿态纠偏功能的飞行机器人,其特征在于,所述纠偏组件(42)的竖直纠偏组件包括第二翼板(422)和转动槽(424);第二翼板(422)与第二齿轮(414)固定连接,第二翼板(422)与机体(1)转动连接;机体(1)上开设有容纳第二翼板(422)的转动槽(424)。
7.根据权利要求6所述的具有分析姿态纠偏功能的飞行机器人,其特征在于,所述限位组件(7)包括限位杆(71)、滑块(72)、弹簧(73)、释放块(74),滑块(72)与机体(1)之间固定安装有弹簧(73),滑块(72)与机体(1)限位滑动连接,滑块(72)上固定安装有限位杆(71),限位杆(71)与第二齿轮(414)和第一齿轮(413)插接,释放块(74)固定安装在不完全齿轮(412)上,且释放块(74)位于不完全齿轮(412)的轮齿上侧;释放块(74)与滑块(72)限位滑动连接。
8.根据权利要求7所述的具有分析姿态纠偏功能的飞行机器人,其特征在于,所述释放块(74)的一端设置为利于滑块(72)滑入的斜面。
9.根据权利要求8所述的具有分析姿态纠偏功能的飞行机器人,其特征在于,所述高度传感器(2)、快速纠偏机构(4)、加速度传感器(5)和姿态传感器(6)均与操控台无线电连接。
10.根据权利要求9所述的具有分析姿态纠偏功能的飞行机器人,其特征在于,所述机体(1)上固定安装有便于装置失联时寻找定位的发烟器(8)。
技术总结本技术公开了一种具有分析姿态纠偏功能的飞行机器人,属于飞行器技术领域,包括机体,所述机体上固定安装有高度传感器、加速度传感器和姿态传感器,四个支架对称固定安装在机体的下侧;快速纠偏机构安装在机体的中部;所述快速纠偏机构包括驱动组件和纠偏组件,驱动组件和纠偏组件安装在机体上。通过上述方式,高度传感器监测飞行器高度,加速度传感器监测飞行器飞行状态,通过姿态传感器监测飞行器飞行姿态;在飞行姿态偏离原定姿态时,驱动组件驱动纠偏组件快速调节装置的水平或竖直的飞行姿态;通过支架避免在起飞或降落时与地面发生直接碰撞;在装置失控失联时,发烟器自动启动,通过发烟器喷出彩烟,便于操作人员寻找。技术研发人员:费旭锋,黄国柒受保护的技术使用者:上海鲸造智能科技有限公司技术研发日:20231225技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240722/223211.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表