用于从车辆的内部发射和着陆无人机的技术的制作方法
- 国知局
- 2024-08-01 06:20:26
本公开涉及用于从车辆的内部发射和着陆自主无人机的系统和方法。
背景技术:
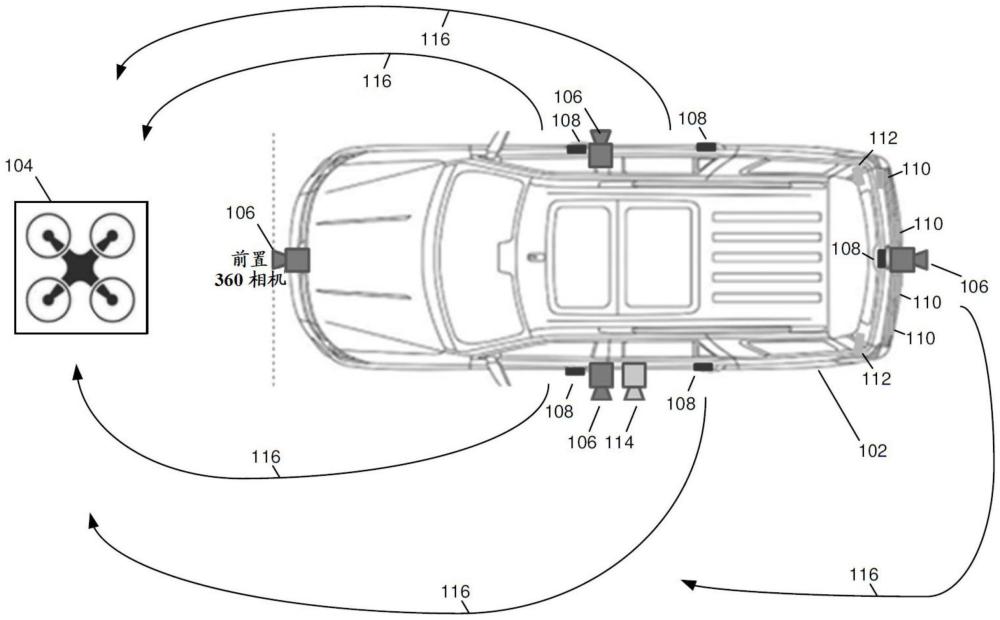
1、结合车辆使用自主无人机有许多好处。由于它们所携带的传感器、机动性、范围、多功能性等等,无人机变得越来越普遍地与现有的车辆系统集成以用于越野活动、人员监测,并且普遍得多地与现有的车辆系统集成以用于越野活动、人员监测等等。另外,许多无人机具有相机、传感器和对象辨识特征,这些特征可能有助于运输中的车辆。
2、虽然用于无人机-车辆集成的一些技术是已知的,但是这些技术通常集中于从车辆的外部或特定开口(例如,天窗)发射无人机,并且通常集中于在发射无人机时车辆静止。无人机部署系统的缺点意味着可能需要专门设计或修改车辆以与无人机一起使用,例如,可能需要在车辆上安装外部着陆垫。因此,目前需要解决上述缺点并提供对无人机-车辆集成的增强。
技术实现思路
1、如下面更详细描述的,车辆可以包括内部传感器套件。来自内部传感器套件的传感器数据、无人机信息和连接的车辆数据可以用于确定从车辆的内部发射无人机和/或无人机返回到车辆的内部的方式。在现有技术内,汽车无人机部署系统是已知的。在汽车无人机部署系统中,可部署的无人机可以被配置为附接到车辆和从车辆分离,并且更具体地,在车辆以自主驾驶模式操作时,车辆和无人机保持彼此通信以交换信息,使得所述车辆在所述自主驾驶模式下的性能得到增强。
2、根据本公开的一个方面,一种车辆控制车身开闭件以促进从车辆的内部发射无人机和/或使无人机着陆在车辆的内部。车辆可以确定位于车辆的内部的无人机自车辆的多个潜在出口。基于无人机到出口位置的间隙、乘员位置和车辆的内部内的妨碍物,可以确定无人机的合适轨迹。如果需要,车辆可以控制车身开闭件和内部元件以促进无人机的轨迹。例如,车辆可以自动移动、旋转或折叠座椅以允许无人机与车辆之间的间隙增加。
3、本文描述的技术涉及确定何时期望和不期望从车辆的内部发射无人机。车辆可以使用相机和传感器的内部传感器套件,以确保无人机的出口位置周围没有对象,并确保无人机在其离开车辆时可以充分绕过所有对象。如果乘客或其他个人位于车辆内,则计算的飞行轨迹可以考虑此类个人的位置和取向。例如,当在车辆的乘员周围或附近导航时,可以提供附加的间隙量。
4、本文描述的技术涉及车辆内部无人机发射和返回规划。在各种实施例中,可以识别车辆的多个潜在出口。这些潜在出口可以包括车窗、车门、后舱门、天窗以及其他潜在飞行路径用于车辆的内部中的无人机离开车辆或返回到车辆。可以利用车辆的内部相机/传感器、外部相机/传感器、无人机信息等来确定当车辆运动或来自使用的停止位置时无人机的发射路径和/或返回路径的内部寻路算法。
5、该功能可以至少部分地通过向车辆提供的关于车辆内的无人机的大小、螺旋桨位置、螺旋桨直径和当前位置的无人机规格来实施。在各种实施例中,无人机规格由车辆的内部传感器/相机确定。在一些实施例中,无人机能够向车辆传输无人机规格信息,以向车辆提供关于大小、螺旋桨直径、间隙要求的详细信息、或可以用于确定针对无人机离开或进入车辆的飞行路径的其他信息。
6、可以通过以下方式确定飞行路径:车辆将识别来自车辆的潜在出口。在各种实施例中,识别车辆的所有潜在出口;在一些情况下,基于各种标准(诸如无人机到出口位置的间隙、乘员位置和车辆内的妨碍物,其可能导致在无人机离开所述车辆时改变其轨迹)仅识别前n个(例如,前3个)潜在出口。在一些实施例中,车辆将自动移动、旋转或折叠座椅以允许无人机与车辆之间的间隙增加,从而创建合适的飞行路径。在各种实施例中,可以使用a*寻路算法来完成路径创建和无人机路线选择,所述a*寻路算法可以用于绕过妨碍物,同时提供离开车辆的最简单和/或最容易的路线。在各种实施例中,计算多个潜在出口路径并对其进行排名以确定最合适的出口路径。
7、可以基于无人机的控制保真度来实施某些限制,使得它不能在人的预定距离内行进,它只能在低于阈值车辆速度x mph时发射,如果行进,它只能从车窗、车门、后舱门等发射离开,只能在车辆静止时移动,等等。
8、在各种实施例中,如果没有路径可供无人机以足够的间隙发射,则车辆将通知请求者无法创建路径并且发射将被延迟或取消。车辆还可以提供关于发射为什么将不会发生的原因,例如,车辆的中央hmi控制台可以呈现指示发射被延迟或取消的图形界面。如果车辆感测到人在距车辆的预定距离内,则可以确定不发射无人机或延迟发射并等待直到人更远离车辆时才打开开闭件。车辆还可以提供关于发射为什么将不会发生的原因,例如,车辆的中央hmi控制台可以呈现指示发射被延迟或取消的图形界面。
9、在各种实施例中,一旦车辆已经确定车辆的内部和/或外部是无障碍物的,则车辆可以发射无人机并使用内部车辆相机和无人机传感器从规定路径监测轨迹。车辆将根据需要打开/关闭车门和车窗,以允许无人机离开车辆。根据各种实施例,如果人或对象进入无人机的期望路径,则无人机将返回到初始起始位置或自动下降到地面以消除人/无人机接触的可能性。
10、无人机可以链接到车辆的控制系统,使得车辆可以控制无人机相对于车辆的加速度、速度、位置、路线等。无人机的各种特性或功能可以由车辆控制。在各种实施例中,车辆与无人机的传感器馈送链接允许车辆基于由无人机提供的原始视频馈送来执行后处理/对象检测/等。
11、在各种实施例中,车辆与无人机通信并提供轨迹命令以控制无人机的路径。所述命令可以控制无人机的方向和/或速度。所述命令可以由无人机接收并经由基于无人机的控制系统来实现。
12、根据本公开的各个方面,无人机从移动的车辆发射。当车辆移动、加速、减速等时,车辆将创建对无人机的对应命令,以确保车辆和无人机在相同的速度参考系中。
13、虽然上文和下文描述的各种技术描述了无人机的发射和规划无人机的发射,但是应当理解,结合发射无人机讨论的技术可以基于背景适用于或适于无人机返回或着陆在车辆的内部内。例如,当无人机准备好返回到车辆时,无人机将传达着陆意图,车辆将提供包括进入位置的返回路径。一旦无人机靠近车辆,开闭件将打开并且无人机将能够返回到车辆。
技术特征:1.一种用于从车辆的内部发射无人机的方法,其包括:
2.如权利要求1所述的方法,其还包括:
3.如权利要求1所述的方法,其中从所述多个潜在出口路径选择所述路线包括选择所述多个潜在出口路径中绕过所述车辆的乘员的潜在出口路径。
4.如权利要求1所述的方法,其还包括打开所述车辆的开闭件。
5.如权利要求1所述的方法,其还包括:
6.如权利要求1所述的方法,其还包括调整所述车辆的一个或多个内部特征以促进所述无人机在所述路线上的发射。
7.如权利要求6所述的方法,其中所述调整包括移动、旋转或折叠所述车辆的一个或多个座椅以允许增加的间隙。
8.一种车辆,其包括:
9.如权利要求8所述的车辆,其中所述一个或多个处理器被配置为使所述车辆:
10.如权利要求8所述的车辆,其中所述多个传感器包括用于识别内部障碍物的多个内部传感器和用于识别外部障碍物的多个外部传感器。
11.如权利要求8所述的车辆,其中所述一个或多个处理器被配置为使所述车辆打开所述多个开闭件中允许所述无人机沿着所述路线离开所述车辆的开闭件。
12.如权利要求8所述的车辆,其中:
13.如权利要求8所述的车辆,其中所述一个或多个处理器被配置为使所述车辆调整所述车辆的一个或多个内部特征以促进所述无人机在所述路线上的发射。
14.如权利要求13所述的车辆,其中所述调整为移动、旋转或折叠所述车辆的一个或多个座椅中的一者以允许增加的间隙。
15.一种用于使无人机着陆在车辆的内部中的方法,其包括:
技术总结本公开提供“用于从车辆的内部发射和着陆无人机的技术”。用于实施汽车无人机部署系统的系统和方法。所述汽车无人机部署系统可以至少包括车辆和可部署无人机。车辆可以具有内部传感器套件和多个潜在出口点用于可部署无人机。当计算多个潜在出口点时,可以保留车辆的对象和乘员。可以从多个潜在出口点中选择路线。车辆可向无人机提供轨迹命令以控制无人机的路径。所述命令可以由无人机接收并经由基于无人机的控制系统来实现。技术研发人员:布兰登·戴蒙德,基思·韦斯顿,M·A·麦克尼斯,安德鲁·丹尼斯·莱万多夫斯基,J·巴雷特受保护的技术使用者:福特全球技术公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240722/223382.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表