一种可调节的无人机的制作方法
- 国知局
- 2024-08-01 06:21:21
本技术涉及无人机,具体为一种可调节的无人机。
背景技术:
1、无人机是一种利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,随着无人机行业的迅猛发展,其在拍照测绘、特种搜救侦查和农业种植中被广泛使用,但现有的无人机在实际使用时还存在一些不足之处:
2、1、现有的无人机机翼尺寸为固定结构,尺寸固定,在实际使用过程中,特别是特种搜救侦查时,由于实际环境因素影响,无人机对于尺寸较小的缝隙难以穿过,从而有效搜救侦查的正常进行;
3、2、现有的无人机在进行降落时,由于旋翼的急停会产生一定作用力,从而导致无人机晃动或倾倒,进而导致无人机降落稳定性较低等问题;
4、为此,针对上述问题,现设计一种可调节的无人机以更好的满足实际使用需求。
技术实现思路
1、本实用新型的目的在于提供一种可调节的无人机,以解决上述背景技术中提出尺寸不便调节难以适应不同环境使用和降落稳定性较低的问题。
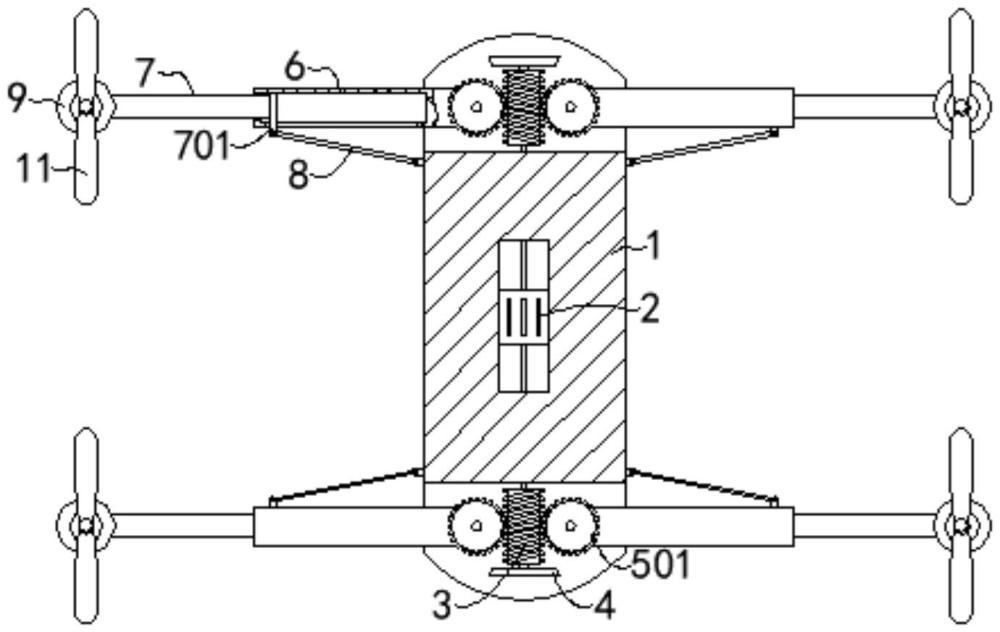
2、为实现上述目的,本实用新型提供如下技术方案:一种可调节的无人机,包括无人机本体,所述无人机本体内固定有双轴电机,所述双轴电机的输出端固定有蜗杆,所述蜗杆轴承连接在挡板上;
3、还包括:
4、旋转轴,轴承连接在所述无人机本体内,所述旋转轴上固定有转杆,所述转杆上连接有滑杆,所述滑杆远离转杆的一端固定有安装架,所述安装架内固定有无刷电机,所述无刷电机的输出端固定有旋翼;
5、活动块,滑动连接在所述安装架内,所述安装架内还设置有支撑杆。
6、优选的,所述旋转轴上还固定有蜗轮,且蜗轮与蜗杆配合可实现转动作用,所述旋转轴的旋转角度为0-75°,通过蜗轮与蜗杆配合,可以为旋转轴的转动提供基础作用力,再配合对旋转轴旋转角度进行限定,可以避免两组旋翼发生碰撞。
7、优选的,所述滑杆与转杆之间为滑动连接,且滑杆在转杆内侧一端还固定有连接块,并且连接块贯穿转杆可进行滑动,通过滑杆与转杆之间的滑动作用,可以实现整个无人机尺寸的调节,以便根据实际需要调节装置的尺寸。
8、优选的,所述连接块上连接有可转动的连接杆的一端,且连接杆的另一端转动在无人机本体上,通过连接杆的传动作用,可以为连接块和滑杆的移动提供基础作用力。
9、优选的,所述活动块下端还固定有减震垫,且减震垫与安装架接触可实现限位作用,所述活动块外侧还等角度固定有四组凸齿杆,通过减震垫的作用,可以在无人机降落时实现一次缓冲减震。
10、优选的,所述活动块上端面还固定有弹簧减震器的一端,且弹簧减震器的另一端固定在安装架,并且活动块通过弹簧减震器与安装架之前构成缓冲机构,通过弹簧减震器的作用,可以在无人机降落时实现二次缓冲减震,保证无人机降落的稳定性。
11、优选的,所述支撑杆与凸齿杆之间为一一对应分布,且支撑杆与安装架之间为嵌套连接,通过多组支撑杆,可以在无人机降落时实现支撑,从而保证无人机降落的稳定性。
12、优选的,所述支撑杆下端还固定有半齿轮,且半齿轮轴承连接在安装架内,并且半齿轮与凸齿杆啮合可实现传动作用,通过半齿轮与凸齿杆之间的啮合传动作用,可以为支撑杆的展开与收纳提供基础保障。
13、与现有技术相比,本实用新型的有益效果是:该可调节的无人机,采用弹性可调式机架结构,可以在实际使用时,对无人机整体尺寸进行调节,以便更好的满足在实际侦测救援需求,提高无人机的适应性,再配合双重缓冲机构和联动的支撑机构,可以在无人机降落时实现缓冲支撑,从而有效保证无人机降落的稳定性,其具体内容如下:
14、1.该可调节的无人机,设置有滑杆,在无人机使用过程中,当需要对无人机尺寸进行调节时,通过双轴电机、蜗杆、旋转轴、蜗轮可以带动转杆和滑杆转动,再配合连接块和连接杆的作用,可以调节转杆和滑杆的总长,从而实现旋翼的位置调节,进而实现无人机整体尺寸调节,以便更好的满足实际使用需求;
15、2.该可调节的无人机,设置有减震垫,在无人机降落时,通过活动块、减震垫和减震垫的作用,可以实现双重缓冲减震,再配合凸齿杆和半齿轮,可以使支撑杆展开实现支撑,保证飞机降落的稳定性。
技术特征:1.一种可调节的无人机,包括无人机本体(1),所述无人机本体(1)内固定有双轴电机(2),所述双轴电机(2)的输出端固定有蜗杆(3),所述蜗杆(3)轴承连接在挡板(4)上;
2.根据权利要求1所述的一种可调节的无人机,其特征在于:所述旋转轴(5)上还固定有蜗轮(501),且蜗轮(501)与蜗杆(3)配合可实现转动作用,所述旋转轴(5)的旋转角度为0-75°。
3.根据权利要求1所述的一种可调节的无人机,其特征在于:所述滑杆(7)与转杆(6)之间为滑动连接,且滑杆(7)在转杆(6)内侧一端还固定有连接块(701),并且连接块(701)贯穿转杆(6)可进行滑动。
4.根据权利要求3所述的一种可调节的无人机,其特征在于:所述连接块(701)上连接有可转动的连接杆(8)的一端,且连接杆(8)的另一端转动在无人机本体(1)上。
5.根据权利要求1所述的一种可调节的无人机,其特征在于:所述活动块(12)下端还固定有减震垫(1201),且减震垫(1201)与安装架(9)接触可实现限位作用,所述活动块(12)外侧还等角度固定有四组凸齿杆(1202)。
6.根据权利要求1所述的一种可调节的无人机,其特征在于:所述活动块(12)上端面还固定有弹簧减震器(13)的一端,且弹簧减震器(13)的另一端固定在安装架(9),并且活动块(12)通过弹簧减震器(13)与安装架(9)之前构成缓冲机构。
7.根据权利要求1所述的一种可调节的无人机,其特征在于:所述支撑杆(14)与凸齿杆(1202)之间为一一对应分布,且支撑杆(14)与安装架(9)之间为嵌套连接。
8.根据权利要求1所述的一种可调节的无人机,其特征在于:所述支撑杆(14)下端还固定有半齿轮(1401),且半齿轮(1401)轴承连接在安装架(9)内,并且半齿轮(1401)与凸齿杆(1202)啮合可实现传动作用。
技术总结本技术公开了一种可调节的无人机,包括无人机本体,所述无人机本体内固定有双轴电机,所述双轴电机的输出端固定有蜗杆,所述蜗杆轴承连接在挡板上;还包括:旋转轴,轴承连接在所述无人机本体内,所述旋转轴上固定有转杆,所述转杆上连接有滑杆,所述滑杆远离转杆的一端固定有安装架,所述安装架内固定有无刷电机,所述无刷电机的输出端固定有旋翼。该可调节的无人机,采用弹性可调式机架结构,可以在实际使用时,对无人机整体尺寸进行调节,以便更好的满足在实际侦测救援需求,提高无人机的适应性,再配合双重缓冲机构和联动的支撑机构,可以在无人机降落时实现缓冲支撑,从而有效保证无人机降落的稳定性。技术研发人员:钱入仓,孙烨,魏振宇受保护的技术使用者:武汉佩璐无人机科技有限公司技术研发日:20230918技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240722/223450.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表