一种水下搜寻救援机器人的制作方法
- 国知局
- 2024-08-01 06:23:46
本发明涉及水下搜寻救援机器人,具体为一种水下搜寻救援机器人。
背景技术:
1、目前,水下搜寻救援机器人是一种常用的救援机器,而水下搜寻救援机器人上通常会使用到驱动机构、摄像头、主体和防护罩等结构,同时,会在其上安设清理结构用于保障和提升机器人的使用效果。
2、其中,经检索,授权公开号为cn219884058u的专利,公开了一种水下搜寻救援机器人。上述专利的机器人在使用过程中,虽然能通过清理机构对防护罩的外表面进行清洁,但是若防护罩表面有水草等缠绕物时,清理机构完成不了缠绕物的清理,导致机器人的使用效果不佳,不能满足于水下的搜寻救援应用。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种水下搜寻救援机器人,主要为解决机器人摄像头防护罩表面有水草等缠绕物时,清理机构完成不了缠绕物的清理,导致机器人的使用效果不佳,不能满足于水下搜寻救援应用的问题。
3、(二)技术方案
4、为实现上述目的,本发明提供如下技术方案:
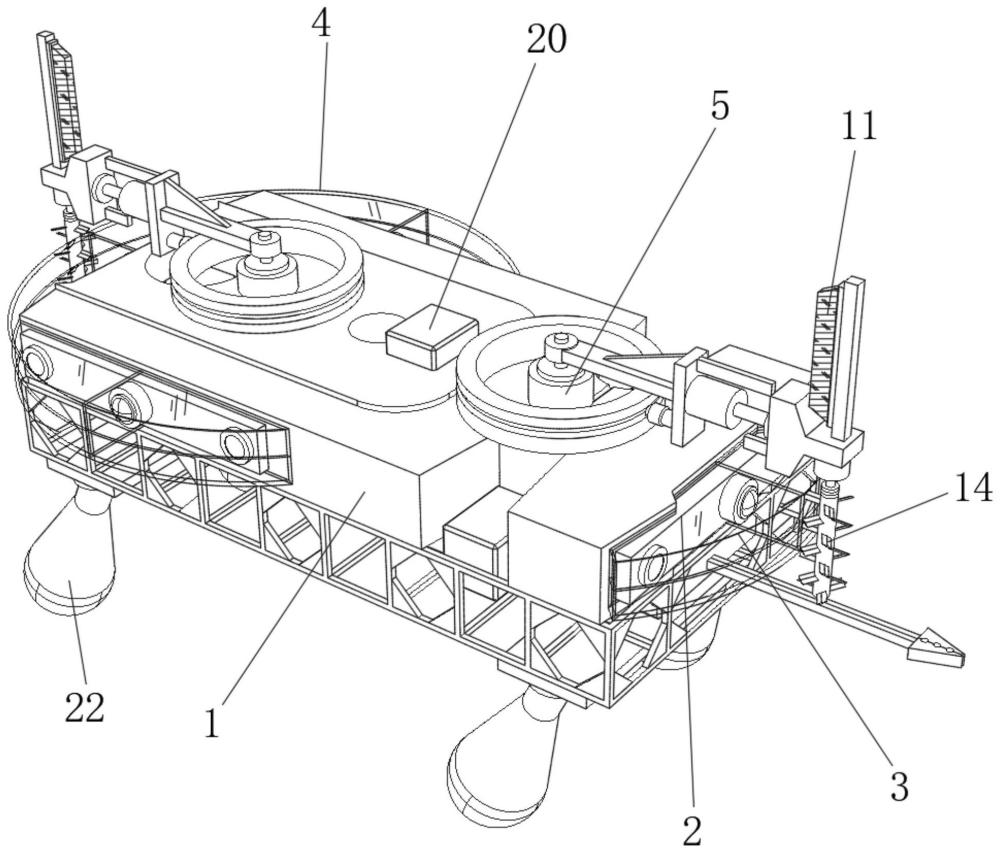
5、一种水下搜寻救援机器人,包括机器人本体,所述机器人本体的多侧均固定连接有搜寻组件,机器人本体的一端固定连接有前弧面透明罩,机器人本体的另一端固定连接有后弧面透明罩,前弧面透明罩和后弧面透明罩罩在搜寻组件的外侧,所述机器人本体的顶部固定连接有两个第一防水电机,第一防水电机的输出端固定套设有连接杆,连接杆的另一端连接座,连接座的一侧固定连接有第二防水电机,第二防水电机的输出端固定连接有固定座,固定座的顶部固定连接有固定杆,固定杆的一侧粘接有清理刷,所述固定座的底部固定连接有第三防水电机,第三防水电机的输出端固定连接有连接轴,连接轴的外壁固定连接有多个破碎短叶。
6、进一步的,所述搜寻组件包括有安装座,安装座通过螺栓固定在机器人本体上,安装座的一侧固定连接有多个摄像头和多个照明灯。
7、在前述方案的基础上,所述连接座的一侧固定连接有定限位块,固定座的一侧固定连接有动限位块,动限位块与定限位块接触。
8、作为本发明再进一步的方案,所述连接杆与连接座之间固定连接有连接筋。
9、进一步的,所述连接座的一侧转动连接有万向球,机器人本体的顶部固定连接有两个外凹面环,万向球在外凹面环上滚动。
10、在前述方案的基础上,所述机器人本体的顶部固定连接有超声波传感器。
11、作为本发明再进一步的方案,所述机器人本体的底部固定连接有两个底板,底板的底部固定连接有两个球头空心座。
12、进一步的,所述底板的底部固定连接有支撑板,两个支撑板之间固定连接有防水电动推杆,防水电动推杆的一端固定连接有第四防水电机,第四防水电机的输出端固定连接有破碎长叶。
13、(三)有益效果
14、与现有技术相比,本发明提供了一种水下搜寻救援机器人,具备以下有益效果:
15、1、通过在第二防水电机的带动下固定座进行转动,从而带动清理刷进行转动,进而使得清理刷与前弧面透明罩和后弧面透明罩接触,然后,在第一防水电机的带动下连接杆进行转动,从而带动连接座、第二防水电机和固定座进行转动,进而带动清理刷进行旋转,于是对前弧面透明罩和后弧面透明罩进行清理。
16、2、通过在第二防水电机的带动下固定座进行转动,从而带动连接轴和破碎短叶进行转动,进而使得破碎短叶与前弧面透明罩和后弧面透明罩接触,然后,在第三防水电机的带动下连接轴进行转动,从而带动破碎短叶进出转动,进而对缠绕物进行清理。
17、3、通过万向球在外凹面环上滚动的设置,从而对连接杆的旋转进行支撑,从而对前弧面透明罩和后弧面透明罩的清理进行支撑,提升清理的稳定性。
18、4、通过在防水电动推杆的带动下第四防水电机进行移动,从而将破碎长叶伸出去,然后,在第四防水电机的带动下破碎长叶进行转动,从而水中的水草进行破碎,以便机器人本体的通过,方便快捷。
技术特征:1.一种水下搜寻救援机器人,包括机器人本体(1),其特征在于,所述机器人本体(1)的多侧均固定连接有搜寻组件(2),机器人本体(1)的一端固定连接有前弧面透明罩(3),机器人本体(1)的另一端固定连接有后弧面透明罩(4),前弧面透明罩(3)和后弧面透明罩(4)罩在搜寻组件(2)的外侧,所述机器人本体(1)的顶部固定连接有两个第一防水电机(5),第一防水电机(5)的输出端固定套设有连接杆(6),连接杆(6)的另一端连接座(7),连接座(7)的一侧固定连接有第二防水电机(8),第二防水电机(8)的输出端固定连接有固定座(9),固定座(9)的顶部固定连接有固定杆(10),固定杆(10)的一侧粘接有清理刷(11),所述固定座(9)的底部固定连接有第三防水电机(12),第三防水电机(12)的输出端固定连接有连接轴(13),连接轴(13)的外壁固定连接有多个破碎短叶(14)。
2.根据权利要求1所述的一种水下搜寻救援机器人,其特征在于:所述搜寻组件(2)包括有安装座(201),安装座(201)通过螺栓固定在机器人本体(1)上,安装座(201)的一侧固定连接有多个摄像头(202)和多个照明灯(203)。
3.根据权利要求1所述的一种水下搜寻救援机器人,其特征在于:所述连接座(7)的一侧固定连接有定限位块(16),固定座(9)的一侧固定连接有动限位块(15),动限位块(15)与定限位块(16)接触。
4.根据权利要求1所述的一种水下搜寻救援机器人,其特征在于:所述连接杆(6)与连接座(7)之间固定连接有连接筋(17)。
5.根据权利要求1所述的一种水下搜寻救援机器人,其特征在于:所述连接座(7)的一侧转动连接有万向球(18),机器人本体(1)的顶部固定连接有两个外凹面环(19),万向球(18)在外凹面环(19)上滚动。
6.根据权利要求1所述的一种水下搜寻救援机器人,其特征在于:所述机器人本体(1)的顶部固定连接有超声波传感器(20)。
7.根据权利要求1所述的一种水下搜寻救援机器人,其特征在于:所述机器人本体(1)的底部固定连接有两个底板(21),底板(21)的底部固定连接有两个球头空心座(22)。
8.根据权利要求7所述的一种水下搜寻救援机器人,其特征在于:所述底板(21)的底部固定连接有支撑板(23),两个支撑板(23)之间固定连接有防水电动推杆(24),防水电动推杆(24)的一端固定连接有第四防水电机(25),第四防水电机(25)的输出端固定连接有破碎长叶(26)。
技术总结本发明涉及水下搜寻救援机器人技术领域,且公开了一种水下搜寻救援机器人,包括机器人本体,所述机器人本体的多侧均固定连接有搜寻组件,机器人本体的一端固定连接有前弧面透明罩,机器人本体的另一端固定连接有后弧面透明罩,前弧面透明罩和后弧面透明罩罩在搜寻组件的外侧。本发明通过在第二防水电机的带动下固定座进行转动,从而带动清理刷进行转动,进而使得清理刷与前弧面透明罩和后弧面透明罩接触,然后,在第一防水电机的带动下连接杆进行转动,从而带动连接座、第二防水电机和固定座进行转动,进而带动清理刷进行旋转,于是对前弧面透明罩和后弧面透明罩进行清理。技术研发人员:敬梅,王岩,庆龙,戴榕娟,蒲琴琴,郭红霞受保护的技术使用者:中国人民解放军海军特色医学中心技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/223656.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种气囊船防碰撞装置
下一篇
返回列表