一种用于水下机器人的浮沉装置及水下机器人
- 国知局
- 2024-08-01 06:25:34
本发明涉及一种用于水下机器人的浮沉装置及水下机器人。
背景技术:
1、现有的沉浮装置主要由浮力调节本体构成,浮力调节本体通常是由具有容纳腔的罐体形成,通过驱动机构带动活塞往复移动,以调节罐体内的水量而调节浮力,从而使浮力调节本体上升或下沉。但现有沉浮装置罐体通常具有较大的体积,这使得罐体在充满水和无水的状态下,罐体的两端的重量存在较大的差异,如此导致在沉浮装置调节浮力时,水下机器人出现整体重力不均衡的情况,大大影响了水下机器人的航行或作业姿态。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种水下机器人,以解决上述问题。
2、本发明采用了如下方案:
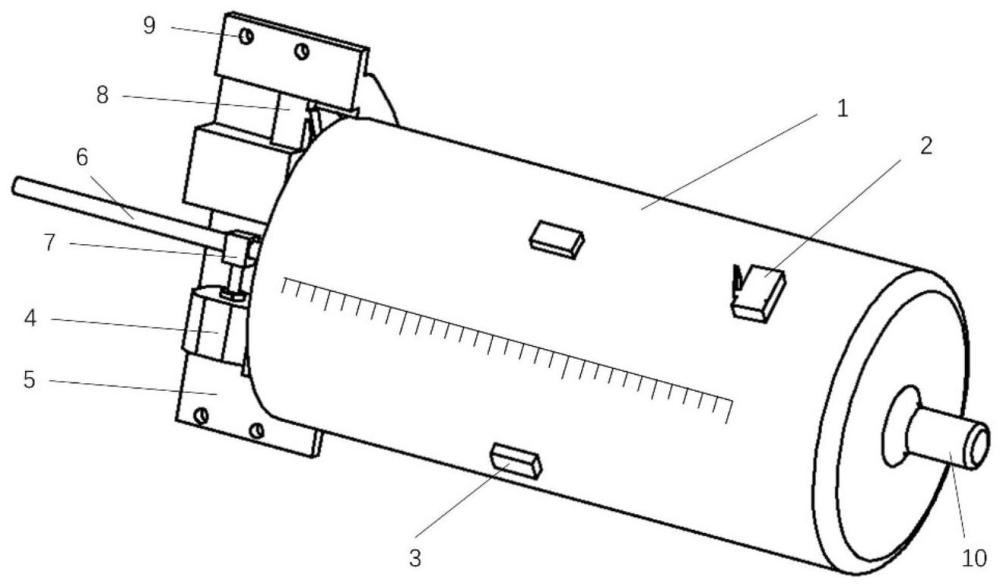
3、本申请提供了一种用于水下机器人的浮沉装置,所述浮沉装置包括有固定支架;设置于所述固定支架上具有容腔的浮力本体,其一端开口设置,另一端具有进出水口;设置于所述容腔内且被推动时于所述容腔内移动,以通过所述进出水口改变所述容腔内储水量的活塞;设置于所述开口侧用以带动所述活塞移动的驱动机构;设置于所述活塞端且跟随所述活塞同步移动的配重件。
4、进一步地,所述活塞包括有活塞杆、连接于所述活塞杆一端的第一活塞部,以及连接于所述第一活塞部的第二活塞部;所述配重件设置于所述第一活塞部和所述第二活塞部之间;所述第一活塞部和所述第二活塞部的外周与所述容腔的内侧面形成活动的密封抵接。
5、进一步地,所述所述第一活塞部和所述第二活塞部上设置有密封圈。
6、进一步地,所述驱动机构包括有电机和转动转换件;所述转动转换件用于将所述所述电机的转动转换为所述活塞杆的直线移动。
7、进一步地,所述浮力本体的外侧面设置有体积刻度标记。
8、进一步地,还包括有两个与所述驱动机构电连接的限位开关,分别用于控制所述活塞在所述容腔内移动的两个极限位置,避免所述活塞过度抽水而脱离所述容腔,及避免所述活塞过度排水而撞击所述容腔内底面。
9、进一步地,还包括第一磁铁,所述配重件为第二磁铁;两个所述限位开关分别设置于所述浮力本体下侧的外周,以及置于所述浮力本体的开口端一侧;所述第一磁铁设置于所述浮力本体上侧的外周部,其跟随所述第二磁铁进行移动,用以触发两个所述限位开关。
10、本发明还提供了一种水下机器人,包括设置于机器人上的所述的浮沉装置,所述浮沉装置的所述进出水口通向外部置于水环境中。
11、通过采用上述技术方案,本发明可以取得以下技术效果:
12、本发明提供了一种水下机器人,其通过在浮沉装置中的活塞端设置有跟随活塞同步移动的配重件,以平衡浮力本体的容腔在充满水和无水的状态下,罐体的两端的重量,即当容腔在充满水时,配重件跟随活塞置于容腔的开口端,如此容腔内的水便会平衡配重件以及驱动机构的重量,而当容腔内没有水时,配重件跟随活塞置于容腔的进出水口端,此时配重件便会平衡驱动机构的重量,进而水下机器人不会出现整体重力不均衡的情况,从而不影响水下机器人的航行或作业姿态。
技术特征:1.一种用于水下机器人的浮沉装置,其特征在于,所述浮沉装置包括有固定支架;设置于所述固定支架上具有容腔的浮力本体,其一端开口设置,另一端具有进出水口;设置于所述容腔内且被推动时于所述容腔内移动,以通过所述进出水口改变所述容腔内储水量的活塞;设置于所述开口侧用以带动所述活塞移动的驱动机构;设置于所述活塞端且跟随所述活塞同步移动的配重件。
2.根据权利要求1所述的用于水下机器人的浮沉装置,其特征在于,所述活塞包括有活塞杆、连接于所述活塞杆一端的第一活塞部,以及连接于所述第一活塞部的第二活塞部;所述配重件设置于所述第一活塞部和所述第二活塞部之间;所述第一活塞部和所述第二活塞部的外周与所述容腔的内侧面形成活动的密封抵接。
3.根据权利要求2所述的用于水下机器人的浮沉装置,其特征在于,所述所述第一活塞部和所述第二活塞部上设置有密封圈。
4.根据权利要求2所述的用于水下机器人的浮沉装置,其特征在于,所述驱动机构包括有电机和转动转换件;所述转动转换件用于将所述所述电机的转动转换为所述活塞杆的直线移动。
5.根据权利要求1所述的用于水下机器人的浮沉装置,其特征在于,所述浮力本体的外侧面设置有体积刻度标记。
6.根据权利要求1-5任意一项所述的用于水下机器人的浮沉装置,其特征在于,还包括有两个与所述驱动机构电连接的限位开关,分别用于控制所述活塞在所述容腔内移动的两个极限位置,避免所述活塞过度抽水而脱离所述容腔,及避免所述活塞过度排水而撞击所述容腔内底面。
7.根据权利要求6所述的用于水下机器人的浮沉装置,其特征在于,还包括第一磁铁,所述配重件为第二磁铁;两个所述限位开关分别设置于所述浮力本体下侧的外周,以及置于所述浮力本体的开口端一侧;所述第一磁铁设置于所述浮力本体上侧的外周部,其跟随所述第二磁铁进行移动,用以触发两个所述限位开关。
8.一种水下机器人,其特征在于,包括设置于机器人上的如权利要求1-7任意一项所述的浮沉装置,所述浮沉装置的所述进出水口通向外部置于水环境中。
技术总结本发明提供了一种用于水下机器人的浮沉装置及水下机器人,通过在浮沉装置中的活塞端设置有跟随活塞同步移动的配重件,以平衡浮力本体的容腔在充满水和无水的状态下,罐体的两端的重量,即当容腔在充满水时,配重件跟随活塞置于容腔的开口端,如此容腔内的水便会平衡配重件以及驱动机构的重量,而当容腔内没有水时,配重件跟随活塞置于容腔的进出水口端,此时配重件便会平衡驱动机构的重量,进而水下机器人不会出现整体重力不均衡的情况,从而不影响水下机器人的航行或作业姿态。技术研发人员:罗坤辉,言兰,姜峰,朱志怡,陈柠檬,华鑫杰受保护的技术使用者:华侨大学技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/223789.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种船舶主机横撑加强结构
下一篇
返回列表