一种抗爆水下软体机器人
- 国知局
- 2024-08-01 06:34:08
本发明属于机器人领域,特别是涉及一种抗爆水下软体机器人。
背景技术:
1、与传统意义上的硬质机器人相比,软机器人在多方面有很大优势,由于采用了柔性材料和设计,使其可以适应更加复杂多变、极端的外部环境和特殊作业,如狭窄弯曲的管道,高压低温的深海,柔性抓取等,在众多领域中表现出了巨大的潜力。而随着软机器人应用的不断扩展,从水下探测,到危险品处理,再到油田勘探,软机器人在许多应用场景都时刻面临着撞击、爆炸等不可预测的极端冲击环境。此时,如何提高软机器人的抗冲击能力成了保证其操作性和稳定性的关键环节。
2、在软机器人抗动态冲击研究领域中,研究认为构成软机器人身体的柔性材料在抵抗冲击中起到了至关重要的作用,它可以通过变形来吸收碰撞产生的大部分能量,从而减轻冲击力量,降低机器人受损的风险。其中,一些研究通过汽车碾压软机器人的爬行足,抛击及静态液压软机器人身体等测试,说明了硅胶的弹性吸能特性在一定程度上有利于抵抗冲击。但在高速冲击下,弹性材料的行为会和低速冲击下有一些不同,较高的加载速率会导致材料发生动态脆性,即材料不具备足够的时间来发生弹塑性变形,因此无法将能量有效地吸收或分散,从而导致脆性破坏。该过程中,冲击能量越高,动响应越显著,破坏越大。同时,最重要的是,核心电路及内部器件作为一体化软机器人至关重要的部分,也是最容易在爆炸冲击中发生损坏的部分,现有研究均未涉及到对它的冲击防护。
3、而在一体化软机器人内部电路及器件的保护上,现有研究一方面是通过将内部器件模块化来减小高压下应力集中带来的电子损坏概率,另一方面是通过具有高延展性的蛇形导线或3d螺旋导线来促使内部结构在外力作用下可以发生形变吸收部分能量,从而减轻软机器人内部电路器件上受到的压力,保护其内部部件,但这些研究仅在静态高压和静态拉伸取得了不错的成效。因此,如何消耗、吸收水下爆炸带来的瞬态高额能量,进而保护内部器件及整体操作,功能完整性成为了一体化软机器人能否实现抵抗水下爆炸功能的关键因素。
技术实现思路
1、针对上述问题,本发明目的在于提出一种抗爆水下软体机器人,以解决水下爆炸瞬态高额能量容易对内部零部件、电路造成损伤的问题。
2、为实现上述目的,本发明采用以下技术方案:一种抗爆水下软体机器人,包括:
3、柔性电路层,设置有多个电路模块,电路模块之间柔性连接;
4、非牛顿流体缓冲层,包覆在柔性电路层外侧;
5、弹性缓冲层,包覆在非牛顿流体缓冲层外侧;
6、驱动单元,与弹性缓冲层相连用于驱动机器人行进。
7、更进一步的,所述电路模块之间通过3d螺旋导线相连。
8、更进一步的,所述弹性缓冲层包括上层硅胶外壳和下层硅胶外壳。
9、更进一步的,所述驱动单元包括介电弹性体和导电介质,所述介电弹性体初始呈收缩状态,所述介电弹性体内设置有导电介质,所述电路模块中设置有电源,所述电源正极与导电介质相连,所述电源负极与水相连,所述介电弹性体在通电后舒展、断电后恢复初始收缩状态。
10、更进一步的,所述弹性缓冲层一侧端面上设置支撑框架,所述支撑框架远离弹性缓冲层一侧与介电弹性体相连,所述支撑框架上设置进出水口用于将水引入支撑框架内与所述电源负极接触,所述介电弹性体的两端分别与支撑框架两侧相连。
11、更进一步的,所述弹性缓冲层两侧对称设置软机器人扑翼。
12、更进一步的,所述支撑框架通过pet薄板连接在弹性缓冲层上。
13、更进一步的,所述导电介质为碳膏。
14、更进一步的,所述介电弹性体为vbh薄膜。
15、更进一步的,所述弹性缓冲层尾部设置软机器人鱼尾。
16、与已有发表的技术比较,本发明的优势在于:
17、1、本机器人采用柔性材料软体设计,能够适应更加复杂多变、极端的外部环境和特殊作业;
18、2、本机器人通过将核心电路模块化设计,然后各个模块之间柔性连接,能够提高在发生爆炸时整体的抗冲击性能,从而降低发生脆裂损坏的风险,并且配合软体,能够更加灵活,适应极端、特殊作业环境,在整体上能够充当最后一道缓冲;
19、3、本机器人通过设计弹性缓冲层,能够起到初步缓冲外界冲击的效果;
20、4、本机器人通过设计非牛顿流体缓冲层与弹性缓冲层相配合,使得本机器人在受到外部水下爆炸场的快速刺激时,非牛顿流体缓冲层的非牛顿流体发生相态转变,由凝胶态转变为玻璃态,冲击区域应力快速分散,内部形变阻力增大,同时促进外部冲击能量在硅胶外壳内传递和吸收,当外部爆炸场冲击力过大时,缓冲层会在进一步冲击下断裂,该过程中会吸收大部分能量,并减小应力集中,大幅削弱冲击载荷峰值;
21、5、本机器人通过柔性电路的模块化和3d螺旋导线的延展性来进一步吸收冲击能量、减小内部应力集中;
22、6、本机器人通过设置介电弹性体配合海水来完成通电过程,能够保证顺利完成对机器人的驱动。
技术特征:1.一种抗爆水下软体机器人,其特征在于,包括:
2.根据权利要求1所述的一种抗爆水下软体机器人,其特征在于:所述电路模块(17)之间通过3d螺旋导线(15)相连。
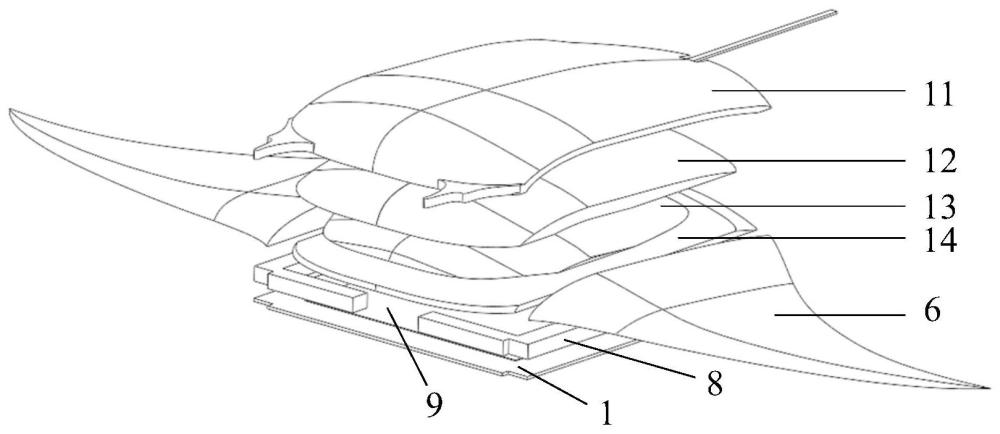
3.根据权利要求1所述的一种抗爆水下软体机器人,其特征在于:所述弹性缓冲层包括上层硅胶外壳(11)和下层硅胶外壳(14)。
4.根据权利要求1所述的一种抗爆水下软体机器人,其特征在于:所述驱动单元包括介电弹性体(1)和导电介质(3),所述介电弹性体(1)初始呈收缩状态,所述介电弹性体(1)内设置有导电介质(3),所述电路模块(17)中设置有电源(16),所述电源(16)正极与导电介质(3)相连,所述电源(16)负极与水相连,所述介电弹性体(1)在通电后舒展、断电后恢复初始收缩状态。
5.根据权利要求3所述的一种抗爆水下软体机器人,其特征在于:所述弹性缓冲层一侧端面上设置支撑框架(8),所述支撑框架(8)远离弹性缓冲层一侧与介电弹性体(1)相连,所述支撑框架(8)上设置进出水口(9)用于将水引入支撑框架(8)内与所述电源(16)负极接触,所述介电弹性体(1)的两端分别与支撑框架(8)两侧相连。
6.根据权利要求5所述的一种抗爆水下软体机器人,其特征在于:所述弹性缓冲层两侧对称设置软机器人扑翼(6)。
7.根据权利要求6所述的一种抗爆水下软体机器人,其特征在于:所述支撑框架(8)通过pet薄板(10)连接在弹性缓冲层上。
8.根据权利要求4所述的一种抗爆水下软体机器人,其特征在于:所述导电介质(3)为碳膏。
9.根据权利要求4所述的一种抗爆水下软体机器人,其特征在于:所述介电弹性体(1)为vbh薄膜。
10.根据权利要求1-9中任一项所述的一种抗爆水下软体机器人,其特征在于:所述弹性缓冲层尾部设置软机器人鱼尾(7)。
技术总结本发明提出了一种抗爆水下软体机器人,属于机器人领域。解决水下爆炸瞬态高额能量容易对内部零部件、电路造成损伤的问题。它包括柔性电路层,设置有多个电路模块,电路模块之间柔性连接;非牛顿流体缓冲层,包覆在柔性电路层外侧;弹性缓冲层,包覆在非牛顿流体缓冲层外侧;驱动单元,与弹性缓冲层相连用于驱动机器人行进。它主要用于水下安全探测、水下资源探勘。技术研发人员:李国瑞,刘晓波,张阿漫,王诗平,张志函,刘洺毓受保护的技术使用者:哈尔滨工程大学技术研发日:技术公布日:2024/5/6本文地址:https://www.jishuxx.com/zhuanli/20240722/224285.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表