一种实现水上救援综合控制装置和系统的制作方法
- 国知局
- 2024-08-01 06:48:00
本发明涉及机器人控制,具体涉及一种实现水上救援综合控制装置和系统。
背景技术:
1、水上救援综合控制系统和装置是专门设计用于水域救援操作的一套设备和系统,这种系统的主要目标是监控水域环境,实时响应紧急情况,协调救援人员和设备,提高水域救援的响应速度、协调性和有效性,也提高水上救援行动的效率,确保在紧急情况下能够迅速采取适当的行动,保障生命安全。
2、现在有的水上救援综合控制系统和装置,在救援过程中,因外力船体容易侧倾角度,严重时整个船体会侧翻,影响船体前进速度,而且遥控水上救援遥船体的无线通信传输距离有限,降低了航行距离,缩小了救援范围,降低救援效率。
技术实现思路
1、为此,本发明提供一种实现水上救援综合控制装置和系统,以解决现有技术中的上述现在有的水上救援综合控制系统和装置,在救援过程中,因外力船体容易侧倾角度,严重时整个船体会侧翻,影响船体前进速度,而且遥控水上救援遥船体的无线通信传输距离有限,降低了航行距离,缩小了救援范围,降低救援效率的问题。
2、为了实现上述目的,本发明提供如下技术方案:
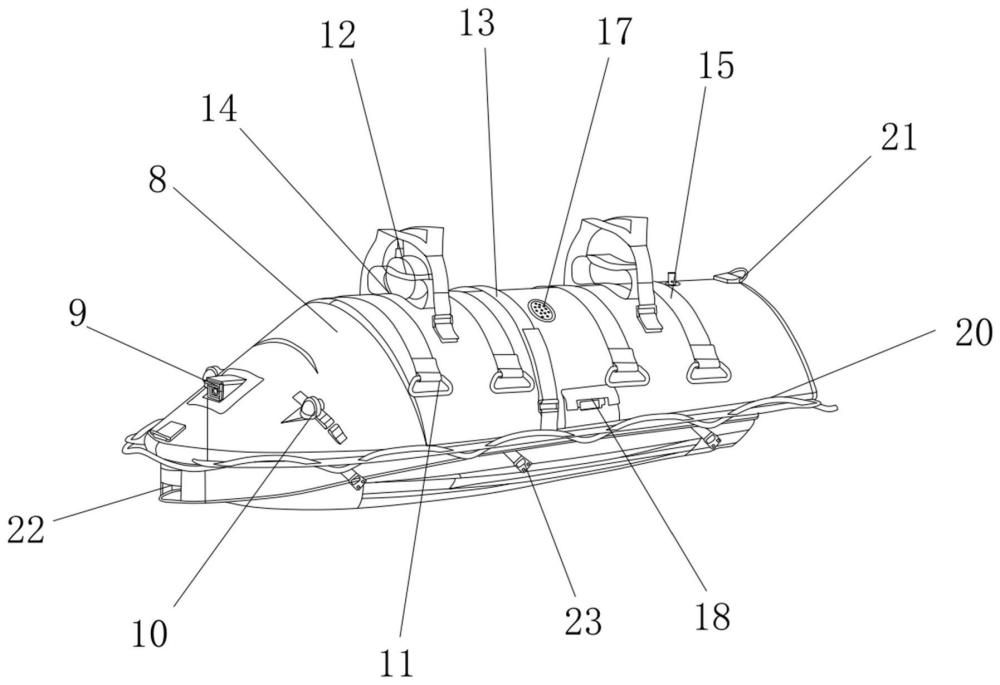
3、根据本发明的第一方面,一种实现水上救援综合控制装置,所述水上救援遥控机器人包括船体,所述船体的上方设置有自扶正外形结构,所述自扶正外形结构的前端设置有红外摄像头,所述自扶正外形结构的前端设置有照明灯,所述自扶正外形结构的顶部设置有拉手,所述自扶正外形结构的顶部设置有头盔固定带,所述自扶正外形结构的顶部设置有救生衣固定带,所述自扶正外形结构的顶部设置有临时用固定用魔术贴,所述临时用固定用魔术贴的一侧连接有漂浮固定带,所述自扶正外形结构的顶部设置有扬声器,所述自扶正外形结构的顶部设置有拾音器,所述自扶正外形结构的侧面设置有警示灯,所述自扶正外形结构的尾部设置有标识旗杆,所述自扶正外形结构的周围设置有救援浮绳,所述自扶正外形结构的尾部设置有固定拖扣,所述船体的前端设置有牵引救援绳,所述船体的周围设置有快速插扣,所述船体的内部设置有触水开关和逻辑控制板。
4、进一步地,所述红外摄像头与自扶正外形结构之间为卡槽连接,所述照明灯关于自扶正外形结构左右对称设置,所述警示灯关于自扶正外形结构左右对称设置,所述标识旗杆与自扶正外形结构之间为卡槽连接,所述快速插扣在自扶正外形结构两侧等距离分布。
5、进一步地,所述头盔固定带在自扶正外形结构上方设置有两组,所述救生衣固定带在自扶正外形结构上方设置有两组,所述漂浮固定带通过临时用固定用魔术贴与自扶正外形结构之间为粘连连接。
6、一种实现水上救援综合控制系统,包括自扶正控制装置、双向语音通话系统、智能开关机系统、遥控接力和袋装式警示灯,在救援过程中,当检测船体倾斜角度时,触发自扶正控制装置进行力矩正值调整,通过控制船体侧面的侧推器推力大小,可以在侧向上产生力,帮助船体回到水平状态,双向语音通话系统自动激活,允许驾驶员与救援人员或控制中心进行实时通信;自扶正控制装置对船体恢复正常角度的同时,一旦船体距离水面较近或接触时,会触发智能开关机系统,智能开关机系统允许智能控制板工作,恢复船体正常行驶;遥控接力用于增强双向语音通话系统的通信范围;智能开关机系统通过自动关闭设备袋装式警示灯提供警示作用。
7、进一步地,自扶正控制装置为该装置的安全系统,通过传感器检测水上救援遥控机器人的倾斜程度,由于船体重心较低,横稳心在重心之上,当检测到危险的倾斜角度时,触发自扶正控制装置,回复力矩正值,且水上救援遥控机器人前端及顶部为圆弧型。
8、进一步地,使用双向语音通话系统呼叫时,接收方端是免按键自行接听通话的,使用无线通信技术,进行远程通话,救援过程中,接收方端还可以通过摄像装置实时观察人员及周围环境。
9、进一步地,智能开关机系统由非接触式液位传感器、智能控制板组成,当船体距离水面较近或接触时,传感器会触发,智能控制板开始工作,同时触发延时功能,从而使泵喷离开水而失去动力,当离开水面恢复正常,智能板开始倒计时准备关机。
10、进一步地,该系统使用遥控接力,通过无线通信将信号从遥控器传输到水上救援遥控机器人,支持两套遥控器控制一台水上救援遥控机器人,增加通信距离,使得水上救援遥控机器人达到倍遥控极限航行距离。
11、进一步地,当智能开关机系统检测到水上救援遥控机器人处于关闭状态时,触发袋装式警示灯,提供额外的可见性和警示,袋装式警示灯的上翻盖便捷安装,也可以存放其它需要的电子物品,操作便捷。
12、本发明具有如下优点:使用双向语音通话系统呼叫时,接收方端是免按键自行接听通话的,使用无线通信技术,进行远程通话,使得被救人员能够与接收方端有效的沟通,报告事故情况、请求帮助或接收紧急指示,救援过程中,接收方端还可以通过摄像装置实时观察人员及周围环境,方便接收方端准确掌握、了解被救人员的需求,智能开关机系统由非接触式液位传感器、智能控制板组成,当船体距离水面较近或接触时,传感器会触发,智能控制板开始工作,同时触发延时功能,从而使泵喷离开水而失去动力,当离开水面恢复正常,智能板开始倒计时准备关机,以防止进一步的破坏或危险,避免救援过程中,因外力船体侧倾导致传感器停止工作,该系统使用遥控接力,通过无线通信将信号从遥控器传输到水上救援遥控机器人,提供更强大的通信信号,支持两套遥控器控制一台水上救援遥控机器人,增加通信距离,使得水上救援遥控机器人达到2倍遥控极限航行距离。
技术特征:1.一种实现水上救援综合控制装置,其特征在于:所述水上救援遥控机器人(1)包括船体(7),所述船体(7)的上方设置有自扶正外形结构(8),所述自扶正外形结构(8)的前端设置有红外摄像头(9),所述自扶正外形结构(8)的前端设置有照明灯(10),所述自扶正外形结构(8)的顶部设置有拉手(11),所述自扶正外形结构(8)的顶部设置有头盔固定带(12),所述自扶正外形结构(8)的顶部设置有救生衣固定带(13),所述自扶正外形结构(8)的顶部设置有临时用固定用魔术贴(14),所述临时用固定用魔术贴(14)的一侧连接有漂浮固定带(15),所述自扶正外形结构(8)的顶部设置有扬声器(16),所述自扶正外形结构(8)的顶部设置有拾音器(17),所述自扶正外形结构(8)的侧面设置有警示灯(18),所述自扶正外形结构(8)的尾部设置有标识旗杆(19),所述自扶正外形结构(8)的周围设置有救援浮绳(20),所述自扶正外形结构(8)的尾部设置有固定拖扣(21),所述船体(7)的前端设置有牵引救援绳(22),所述船体(7)的周围设置有快速插扣(23),所述船体(7)的内部设置有触水开关(24)和逻辑控制板(25)。
2.根据权利要求1的一种实现水上救援综合控制装置,其特征在于:所述红外摄像头(9)与自扶正外形结构(8)之间为卡槽连接,所述照明灯(10)关于自扶正外形结构(8)左右对称设置,所述警示灯(18)关于自扶正外形结构(8)左右对称设置,所述标识旗杆(19)与自扶正外形结构(8)之间为卡槽连接,所述快速插扣(23)在自扶正外形结构(8)两侧等距离分布。
3.根据权利要求1的一种实现水上救援综合控制装置,其特征在于:所述头盔固定带(12)在自扶正外形结构(8)上方设置有两组,所述救生衣固定带(13)在自扶正外形结构(8)上方设置有两组,所述漂浮固定带(15)通过临时用固定用魔术贴(14)与自扶正外形结构(8)之间为粘连连接。
4.一种实现水上救援综合控制系统,与权利要求1-3任一所述的一种实现水上救援综合控制装置相互配合工作,其特征在于:包括自扶正控制装置(2)、双向语音通话系统(3)、智能开关机系统(4)、遥控接力(5)和袋装式警示灯(6),在救援过程中,当检测船体倾斜角度时,触发自扶正控制装置(2)进行力矩正值调整,通过控制船体侧面的侧推器推力大小,可以在侧向上产生力,帮助船体回到水平状态,双向语音通话系统(3)自动激活,允许驾驶员与救援人员或控制中心进行实时通信;自扶正控制装置(2)对船体恢复正常角度的同时,一旦船体距离水面较近或接触时,会触发智能开关机系统(4),智能开关机系统(4)允许智能控制板工作,恢复船体正常行驶;遥控接力(5)用于增强双向语音通话系统(3)的通信范围;智能开关机系统(4)通过自动关闭设备袋装式警示灯(6)提供警示作用。
5.根据权利要求4的一种实现水上救援综合控制系统,其特征在于:自扶正控制装置(2)为该装置的安全系统,通过传感器检测水上救援遥控机器人(1)的倾斜程度,由于船体重心较低,横稳心在重心之上,当检测到危险的倾斜角度时,触发自扶正控制装置(2),回复力矩正值,且水上救援遥控机器人(1)前端及顶部为圆弧型。
6.根据权利要求4的一种实现水上救援综合控制系统,其特征在于:使用双向语音通话系统(3)呼叫时,接收方端是免按键自行接听通话的,使用无线通信技术,进行远程通话,救援过程中,接收方端还可以通过摄像装置实时观察人员及周围环境。
7.根据权利要求4的一种实现水上救援综合控制系统,其特征在于:智能开关机系统(4)由非接触式液位传感器、智能控制板组成,当船体距离水面较近或接触时,传感器会触发,智能控制板开始工作,同时触发延时功能,从而使泵喷离开水而失去动力,当离开水面恢复正常,智能板开始倒计时准备关机。
8.根据权利要求4的一种实现水上救援综合控制系统,其特征在于:该系统使用遥控接力(5),通过无线通信将信号从遥控器传输到水上救援遥控机器人(1),支持两套遥控器控制一台水上救援遥控机器人(1),增加通信距离,使得水上救援遥控机器人(1)达到2倍遥控极限航行距离。
9.根据权利要求4的一种实现水上救援综合控制系统,其特征在于:当智能开关机系统(4)检测到水上救援遥控机器人(1)处于关闭状态时,触发袋装式警示灯(6),提供额外的可见性和警示,袋装式警示灯(6)的上翻盖便捷安装,也可以存放其它需要的电子物品,操作便捷。
技术总结本发明公开了一种实现水上救援综合控制装置和系统,本发明属于机器人控制技术领域,本发明的目的在于解决现在有的水上救援综合控制系统和装置,在救援过程中,因外力船体容易侧倾角度,严重时整个船体会侧翻,影响船体前进速度,而且遥控水上救援遥船体的无线通信传输距离有限,降低了航行距离,缩小了救援范围,降低救援效率的问题。达到的技术效果为:当船体距离水面较近或接触时,传感器会触发,智能控制板开始工作,使泵喷离开水而失去动力,避免救援过程中,因外力船体侧倾导致传感器停止工作,遥控接力提供更强大的通信信号,支持两套遥控器控制一台水上救援遥控机器人,增加通信距离,增加水上救援遥控机器人航行距离。技术研发人员:常建,向朝华,杨斌,王亚辉,姚根双,常善强受保护的技术使用者:北京凌天智能装备集团股份有限公司技术研发日:技术公布日:2024/5/27本文地址:https://www.jishuxx.com/zhuanli/20240722/225097.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表