一种水下探视型机器人
- 国知局
- 2024-08-01 06:47:58
本技术涉及水下机器,具体为一种水下探视型机器人。
背景技术:
1、水下机器人是一种能够在水下环境中执行任务的智能机器人,对于海洋探测、资源开发、环境保护等领域都有重要的意义,为此提出一种水下探视型机器人对水域进行探视,从而获得更多的数据。
2、现有的可参考公告号为:cn210212727u的中国实用新型专利,其公开了一种水下机器人检测用360度全向影像系统,该种水下机器人检测用360度全向影像系统的设置,包括设备主体,所述设备主体的前端设有电气元件箱,所述设备主体和电气元件箱的外围均设有护管,所述设备主体上焊接有提手,所述电气元件箱的底端连接有传动轴,所述传动轴上套接有固定座。本实用新型通过设置的双转动机构使水下机器人的摄影机构无死角的拍摄,有利于岸上工作人员获取更多的水下情况,首先第一电机通过第一主动齿轮带动第一从动齿轮转动进而带动连接轴转动,从而使摄像机进行前后的角度转动,其次第二电机通过第二主动齿轮带动第二从动齿轮转动进而通过转轴带动托板转动,使摄像机进行水平圆周运动。
3、在现有的水下探视型机器人使用的过程中,当水域的深度达到一定的深度时,水下机器人在探视的过程中视线会受到影响,导致人们不能清晰看到水域中的环境,也不能及时做出判断,以及水下机器人在使用的过程中不能全方位的进行探视,导致工作人员不能全面看到水域中的环境,也会导致工作人员不能及时做出判断,有待改进,因此,本领域技术人员提供了一种水下探视型机器人,以解决上述背景技术中提出的问题。
技术实现思路
1、本实用新型的目的在于提供一种水下探视型机器人,以解决上述背景技术中提出的现有的水下探视型机器人全方位探测和视线补充的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
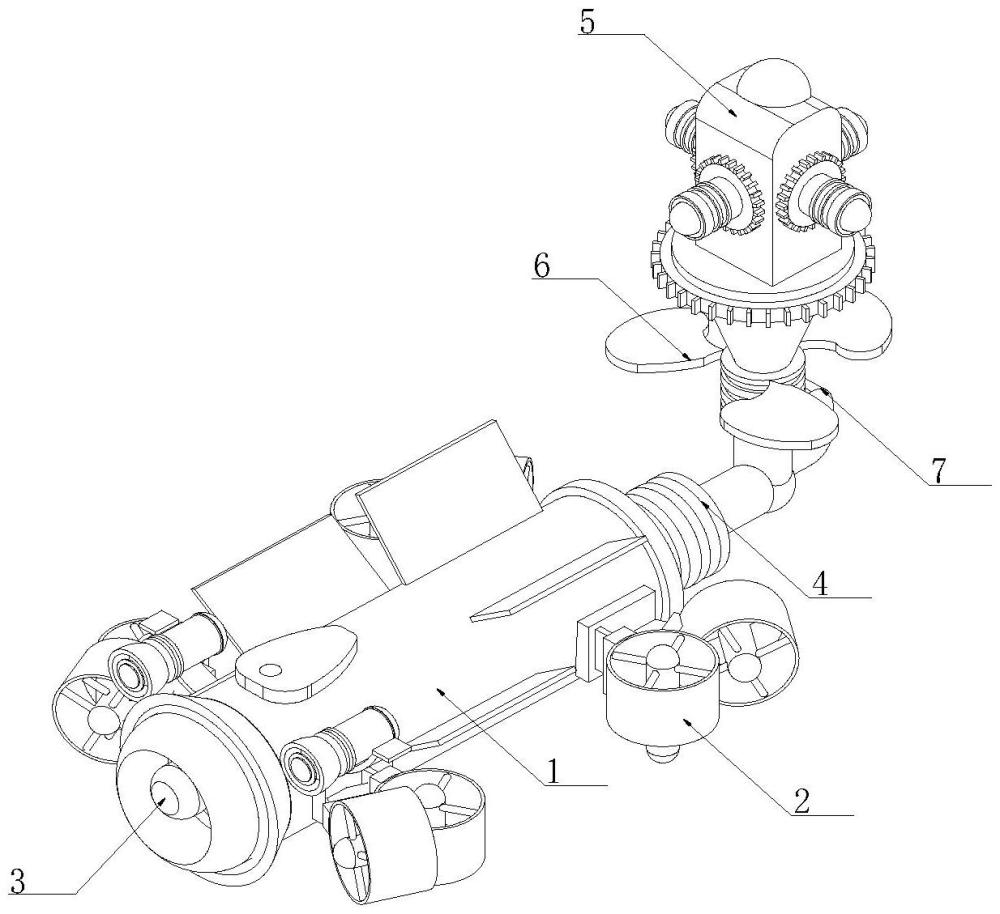
3、一种水下探视型机器人,包括水下机器,所述水下机器的前方安装有水下探视照明机构,所述水下机器的后方上侧安装有全方位探视机构,所述水下探视照明机构包括:安装于所述水下机器前方的探视灯,所述探视灯的外部设置有微像头,且所述微像头的外部设置有光环,所述微像头的后方安装有用于水域探测的摄像仪;
4、所述全方位探视机构包括:安装于所述水下机器后方上侧的探视装置,所述探视装置的四侧均设置有全方位摄像头,且所述探视装置的下方设置有底部转盘,并且所述底部转盘的下方设置有用于底部夹持的撑爪钩,所述撑爪钩的下方连接有内转柱,且所述内转柱的一侧设置有用于驱动设备转动的驱动器。
5、优选的,所述水下机器的后方安装有后尾环,且所述水下机器的两侧设置有转动翼,所述探视装置的下方安装有旋转页;所述后尾环和所述探视装置之间连接,便于所述水下机器进行探视。
6、优选的,所述旋转页包括:
7、收缩杆,所述收缩杆连接于所述旋转页的一侧,且所述旋转页和所述收缩杆之间设置有连接环;
8、中心器,所述中心器连接于所述收缩杆的中点,且所述中心器的下方设置有收拉柱,并且所述收拉柱贯穿于所述中心器的内部和所述收缩杆之间构成连接关系;
9、浮动器,所述浮动器设置于所述收拉柱的下方,且所述浮动器的下方连接有底环;所述收缩杆进而收拉柱的设置可以将所述旋转页进行打开或关闭。
10、优选的,所述水下机器的内部安装有器筒,且所述摄像仪的外部安装有调距环,并且所述微像头的后方连接有连接线,所述微像头环形分布于所述光环的内部,且所述摄像仪的外壁紧贴于所述器筒的内壁;所述微像头的设置可以增加监测的视角。
11、优选的,所述驱动器的外部设置有转动箱,且所述撑爪钩的底部设置有圆盘,并且所述底部转盘位于所述撑爪钩内部的中上方;所述驱动器促使所述内转柱转动。
12、优选的,所述全方位摄像头和所述探视装置之间设置有转动环,且所述底部转盘的下方连接有连器柱,所述全方位摄像头设置的数量为四个,且所述连器柱的上方具有收缩的功能;所述底部转盘可以促使所述全方位摄像头进行转动。
13、优选的,所述水下机器通过所述转动翼进行驱动,且所述转动翼分别位于所述水下机器的左右两侧;所述水下机器可以勘探水域中的情况。
14、与现有技术相比,本实用新型的有益效果是:
15、1、该种水下探视型机器人,通过在水下机器的前方设置有探视灯,且探视灯的外部设置有光环,并且光环的内壁设置有微像头,微像头对水下机器的前方进行探视,当微像头随着水下机器移动时,光环和探视灯可以为微像头补充光线,便于工作人员通过微像头可以全面看到水域中的情况,此设计避免了水下机器在运行时光线不足的问题,同时也提高了水下机器的探视范围;
16、2、该种水下探视型机器人,通过在水下机器的后方设置有探视装置,且探视装置的四侧均设置有全方位摄像头,全方位摄像头可以将水下机器的周围环境进行监测,同时也利于工作人员更加直观的看到水域中的情况,并且全方位摄像头的下方设置有底部转盘,底部转盘的下方设置有撑爪钩,撑爪钩通过内转柱和驱动器可以将底部转盘进行转动,使全方位摄像头可以进行角度调整,让工作人员拍摄的更加清晰、全面,以及在转动环的四侧设置有有旋转页,旋转页转动的设置可以将全方位摄像头附近的生物进行驱赶,便于水下机器顺利运行。
技术特征:1.一种水下探视型机器人,包括水下机器(1),所述水下机器(1)的前方安装有水下探视照明机构,所述水下机器(1)的后方上侧安装有全方位探视机构,其特征在于,所述水下探视照明机构包括:安装于所述水下机器(1)前方的探视灯(3),所述探视灯(3)的外部设置有微像头(15),且所述微像头(15)的外部设置有光环(14),所述微像头(15)的后方安装有摄像仪(12);
2.根据权利要求1所述的一种水下探视型机器人,其特征在于:
3.根据权利要求2所述的一种水下探视型机器人,其特征在于:
4.根据权利要求1所述的一种水下探视型机器人,其特征在于:
5.根据权利要求1所述的一种水下探视型机器人,其特征在于:
6.根据权利要求1所述的一种水下探视型机器人,其特征在于:
7.根据权利要求2所述的一种水下探视型机器人,其特征在于:
技术总结本技术公开了一种水下探视型机器人,涉及水下机器技术领域,包括水下机器,所述水下机器的前方安装有水下探视照明机构,所述水下机器的后方上侧安装有全方位探视机构,所述水下探视照明机构包括:安装于所述水下机器前方的探视灯,所述探视灯的外部设置有微像头。该种水下探视型机器人,通过在水下机器的前方设置有探视灯,且探视灯的外部设置有光环,并且光环的内壁设置有微像头,微像头对水下机器的前方进行探视,当微像头随着水下机器移动时,光环和探视灯可以为微像头补充光线,便于工作人员通过微像头可以全面看到水域中的情况,此设计避免了水下机器在运行时光线不足的问题,同时也提高了水下机器的探视范围。技术研发人员:王希卓,孔德宇,董奥博,周源,张珈宁受保护的技术使用者:郑州大学技术研发日:20231011技术公布日:2024/5/27本文地址:https://www.jishuxx.com/zhuanli/20240722/225095.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表