一种用于污染物溯源的装置
- 国知局
- 2024-08-01 06:48:04
本技术属于污染物溯源,具体涉及一种用于污染物溯源的装置。
背景技术:
1、污染物溯源定义为对环境污染的来源进行追踪和定位,以确定污染源的位置和范围。
2、授权公告号cn103969415b公开了一种移动式水污染数据采集系统,包括船舶、中央服务器、安装在船舶上的水污染检测模块和gprs模块。该采集系统的船舶移动过程中,利用gprs模块采集船舶的位置,然后再利用水质检测传感器采集水质数据,将船舶的位置和水质检测传感器监测的数据共同传输给中央服务器,可以获知流域与水质时空分布图。
3、该系统只能依靠gprs模块获知污染物的大致位置,即污染物的坐标。但是,由于gprs模块不能获知该污染物在水下的深度情况,所以溯源结果不够准确;更加不能获知污染物在水下的具体形态。
技术实现思路
1、本实用新型的一种用于污染物溯源的装置,其能够获知污染物的位置,更能获知污染物在水下的具体形态。
2、为了实现上述目的,本实用新型的一种用于污染物溯源的装置,包括船坞机构和无人值守船机构,无人值守船机构包括:两艘简易船,沿x方向并列设置,x方向为水平方向;
3、两个螺旋桨,分别安装在两个简易船上,两个螺旋桨沿x方向并列设置;两个螺旋桨处于两个简易船沿y方向的一端,y方向为水平方向且垂直于x方向;螺旋桨的轴线沿y方向;
4、支撑架,同时与两个简易船固定连接;
5、gps模块装置,安装在支撑架上,与支撑架上的控制器电性连接;
6、电导电极,安装在简易船上,与控制器电性连接;
7、绕卷架,固定在支撑架上;
8、绕卷辊,转动连接在绕卷架上;支撑架上设有用于使绕卷辊转动的电机;电机与控制器电性连接;
9、绕卷辊上绕卷有线缆,线缆的一端自由端连接有水下机器人机构,另一端自由端连接有电池,电池设置在支撑架上,电池给无人值守船机构上的用电设备供电,电池通过线缆给水下机器人机构供电,水下机器人机构通过线缆与控制器电性连接。
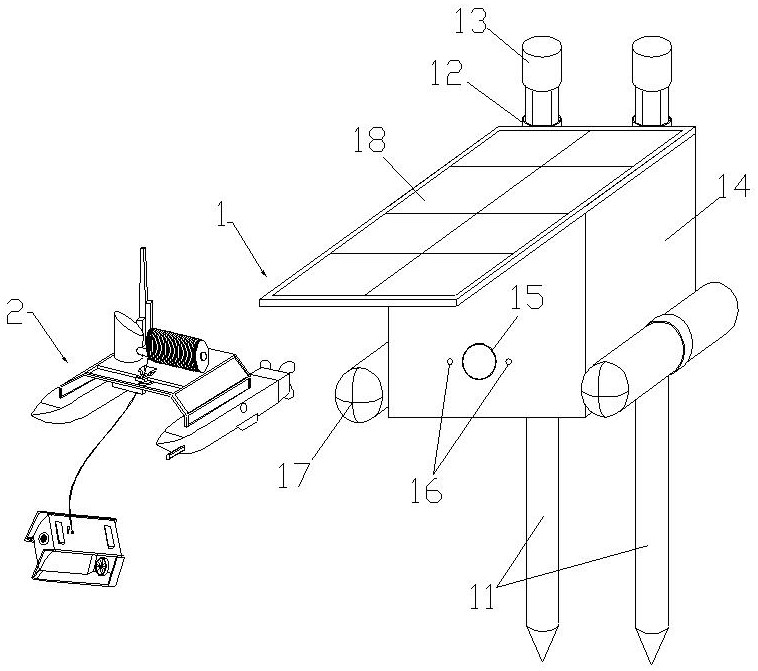
10、进一步地,所述船坞机构包括:
11、固定桩,共两个,轴线沿竖向设置,固定桩的下端插入到水底;固定桩的上端伸出水面;
12、限位环,有多个,分别套设在固定桩上,能沿固定桩的轴线移动;
13、充电箱,同时与多个限位环固定连接;
14、两个红外发射二极管,处于送电线圈的两侧,位于充电箱的外壁;支撑架上安装有用于接收红外发射二极管光信号的两个红外接收器;
15、浮筒,固定在充电箱上,浮筒和充电箱作为整体能在浮筒的浮力下浮于水面上;送电线圈和红外发射二极管均处于水面上。
16、船坞可以给无人值守船作为一个停靠,在无人值守船执行完任务后,可以有一个切确的位置可以供人寻找无人值守船。
17、进一步地,所述控制器电性连接有5g通讯模块,控制器通过5g通讯模块与地面基站连接;水下机器人机构包括摄像系统,摄像系统通过线缆与控制器电性连接。
18、摄像系统拍摄的图像通过电缆传输给控制器,再通过5g通讯模块远程发送给地面基站,供地面基站的人员实时查看水下的污染物形态。如果没有5g通讯模块,操作人员就需要到船坞机构位置,将读取机构插入到控制器的端口再手动读取水下的污染物形态,操作起来没有直接采用5g通讯模块方便。
19、进一步地,所述船坞机构还包括:
20、送电线圈,安装于充电箱中,处于充电箱的侧壁;送电线圈处于两个红外发射二极管之间;
21、受电线圈,用于接收送电线圈的电力,受电线圈安装在支撑架上,受电线圈与电池连接。
22、通过设置送电线圈和受电线圈,可以让无人值守船机构在船坞机构附近停靠时实现充电,让无人值守船机构在非工作状态时,能保持电量充足。如果没有送电线圈和受电线圈,每次无人值守船机构使用一段时间后,操作人员将会去船坞机构附近给每个无人值守船机构充电,十分地不方便。
23、进一步地,所述充电箱的上表壁开设有敞口,充电箱的上表壁固定有太阳能板,太阳能板的电线通过敞口与送电线圈电性连接。
24、将敞口设置在充电箱的上端,敞口就不容易靠近水面,水面上溅起的水就不容易通过敞口进入到充电箱中,更加不容易影响充电箱内部电气的正常运行。
25、进一步地,所述固定桩的上端固定有防脱块,防脱块的尺寸大于限位环的内径。
26、可以避免充电箱充固定桩上脱落,导致出现无人值守船机构无法充电的情况。
27、进一步地,所述支撑架上开设有对接孔,线缆穿过对接孔,水下机器人机构的上表壁固定有穿入到对接孔的对接头,对接头位于靠近线缆的位置。
28、水下机器人机构的对接头插入到对接孔中时,此时线缆还处于未放卷的情况。该情况下,由于线缆未放卷,所以对接头始终处于对接孔中,由于线缆是柔性的,所以难以完全限制水下机器人机构的位置,因此水下机器人机构可以在一定地范围内移动,但是由于需保持对接头处于对接孔中,所以水下机器人机构的移动范围有限,仅限于对接孔,因此起到限位作用。
29、进一步地,所述水下机器人机构的上表壁固定有用于缓冲的防撞条。
30、有益效果:
31、1、本方案设置了无人值守船机构,无人值守船机构具备水下机器人,能够通过线缆的放卷,使水下机器人到达水面以下,再利用水下机器人自带的摄像系统,对水下的污染物形态进行拍摄,获得污染物水下的图像并上传给控制器,由控制器通过5g通讯模块发送给地面基站。相比于现有技术,不仅仅能获得污染物的坐标,还能获得污染物水下的形态。
32、2、设置了船坞机构,船坞机构的送电线圈与无人值守船机构的受电线圈,在电磁感应原理下,实现强耦合式充电,保证了无人值守船机构具有足够的电量完成溯源任务。
33、3、设置了太阳能板,利用太阳能板将太阳能转换为送电线圈的电能,实现给无人值守船机构的受电线圈充电。
技术特征:1.一种用于污染物溯源的装置,其特征在于,包括船坞机构(1)和无人值守船机构(2),无人值守船机构(2)包括:
2.根据权利要求1所述的一种用于污染物溯源的装置,其特征在于,所述船坞机构(1)包括:
3.根据权利要求1所述的一种用于污染物溯源的装置,其特征在于,所述控制器电性连接有5g通讯模块,控制器通过5g通讯模块与地面基站进行通信;水下机器人机构(22)包括摄像系统(221),摄像系统(221)通过线缆(218)与控制器电性连接。
4.根据权利要求2所述的一种用于污染物溯源的装置,其特征在于,所述船坞机构(1)还包括:受电线圈,用于接收送电线圈(15)的电力,受电线圈安装在支撑架(213)上,受电线圈与电池连接。
5.根据权利要求4所述的一种用于污染物溯源的装置,其特征在于,所述充电箱(14)的上表壁开设有敞口,充电箱(14)的上表壁固定有太阳能板(18),太阳能板(18)的电线通过敞口与送电线圈(15)电性连接。
6.根据权利要求4所述的一种用于污染物溯源的装置,其特征在于,所述固定桩(11)的上端固定有防脱块(13),防脱块(13)的尺寸大于限位环(12)的内径。
7.根据权利要求4所述的一种用于污染物溯源的装置,其特征在于,所述支撑架(213)上开设有对接孔(2110),线缆(218)穿过对接孔(2110),水下机器人机构(22)的上表壁固定有穿入到对接孔(2110)的对接头(222),对接头(222)位于靠近线缆(218)的位置。
8.根据权利要求4所述的一种用于污染物溯源的装置,其特征在于,所述水下机器人机构(22)的上表壁固定有用于缓冲的防撞条(223)。
技术总结本技术公开了一种用于污染物溯源的装置,包括船坞机构和无人值守船机构。无人值守船机构包括:两艘简易船和两个螺旋桨;支撑架,同时与简易船固定连接;GPS模块装置,安装在支撑架上,与支撑架上的控制器电性连接;电导电极,安装在简易船上,与控制器电性连接;绕卷架,固定在支撑架上;绕卷辊,转动连接在绕卷架上;支撑架上设有电机;电机与控制器电性连接;绕卷辊上绕卷有线缆,线缆的一端连接有水下机器人机构,另一端连接有电池,电池通过线缆给水下机器人机构供电,水下机器人机构与控制器电性连接。该装置可以对水面以下污染物的形态进行拍照,不仅能获得污染物的坐标,还能获得污染物的水下形态。技术研发人员:刘新宇受保护的技术使用者:河海大学技术研发日:20240424技术公布日:2024/5/27本文地址:https://www.jishuxx.com/zhuanli/20240722/225103.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表