一种水下行走装置的制作方法
- 国知局
- 2024-08-01 06:57:13
本申请涉及水下机械相关,尤其涉及一种水下行走装置。
背景技术:
1、水下机器人是一种可以在水下进行各种任务的机器人,包括船底清洗。它们通常被用于检查、维护、修复甚至救援等水下工作,因为它们可以在人类难以进入或者环境危险的水下环境中工作。
2、船底清洗的主要目的是去除货轮上的寄生物,这些寄生物通常包括硅藻、藤壶、牡蛎等甲壳生物。这些生物会在船底大量附着,不仅增加了船身的重量,还可能导致船速下降,燃料消耗增加,甚至腐蚀船体材质,影响船舶的作战性能或运输效率。
3、在实际清洗船底的过程中,船底的寄生物确实给清洗工作带来了很大的挑战。这些寄生物,如海藻、贝类等,不仅数量庞大,而且体重也不轻,人工清洗的难度较大。更为重要的是,这些寄生物在生长过程中会散发出刺鼻的恶臭,这不仅对清洗人员的身体健康造成了一定的威胁,还大大降低了工作效率。在人工清洗的过程中,清洗人员需要穿着厚重的潜水服,戴着厚重的手套,以防止被寄生物划伤或者被有毒物质侵蚀。然而,即使是这样,他们仍然需要花费大量的时间和精力去清除这些寄生物。因此,需求一种能够自主水下行走并同时能够对船底进行清洗的机器人。
技术实现思路
1、本申请提出了一种水下行走装置,具备机械化清除船底寄生物的优点,用以解决上述背景技术中提出船底因寄生物繁多而导致清理难度大的问题。
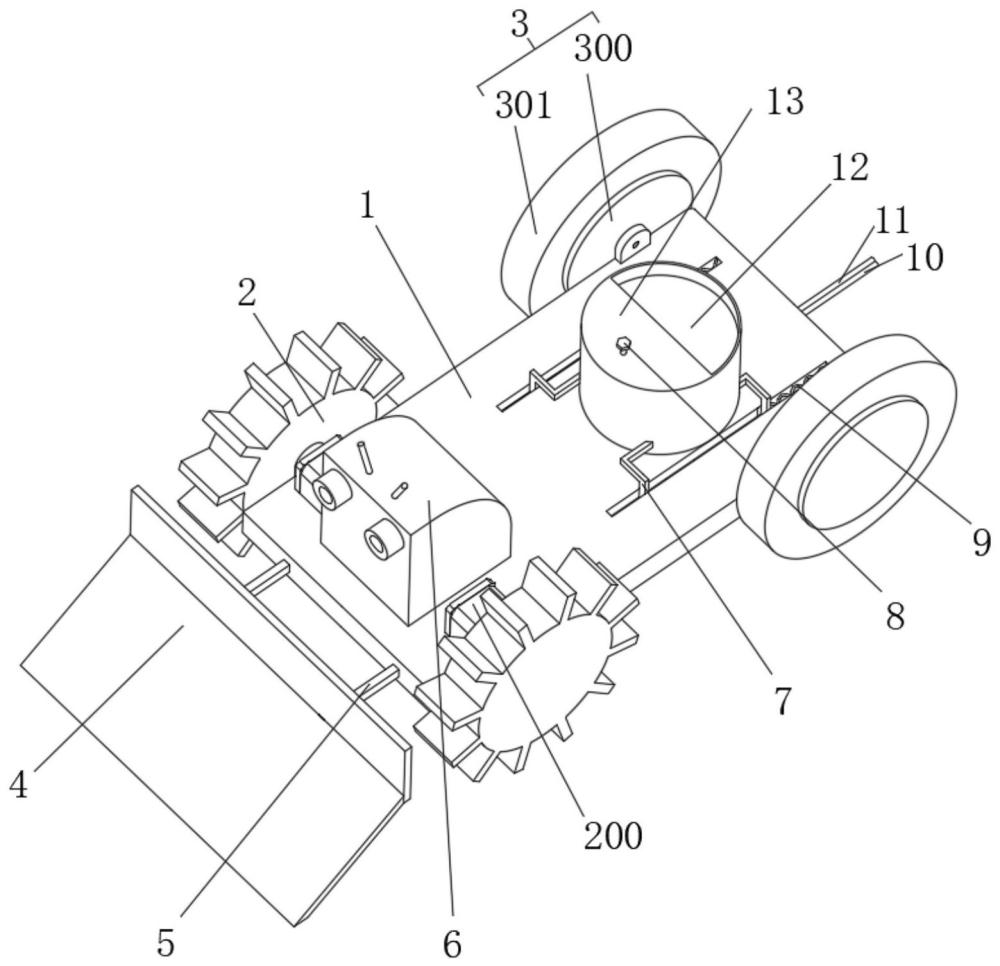
2、为达到上述目的,本申请采用如下技术方案:一种水下行走装置,包括:车体,表面对称固定有行进电机,行进电机的输出轴上安装有行动轮,车体的侧部布置有从动轮;磁块,设置在车体中,通过磁块对船底的磁性吸附实现车体附着在船底;推架,安装在车体的端部,且推架的端部固定安装有位于行动轮一侧的铲板。
3、进一步,车体的表面固定安装有控制中枢,控制中枢控制着行进电机的运动,车体尾部连接的电线管束对控制中枢进行供电。
4、进一步,车体的表面固定安装有调距座,调距座的内部活动安装有密封座,密封座的底部以及调距座的内侧共同构建有存液腔,磁块与密封座同轴固定,车体的背部固定安装有与存液腔相通的送水管,送水管的另一端与加压水泵相连。
5、进一步,推架活动安装在车体的内部,且推架的端部和车体的内侧之间设置有顶簧,推架的侧部开设有泄压槽,调距座的侧部开设有将存液腔与外部相通的排液孔。
6、进一步,磁块的外侧固定套装有蓄压环座,调距座的顶部螺纹连接有调距螺栓,且调距螺栓的底部固定有位于密封座上方的开关,推架的侧部固定安装有活动架,且活动架活动安装在调距座上,活动架的中部位于存液腔中,活动架的中部铰接有位于蓄压环座下方的传动压杆,且传动压杆和活动架之间依据拉簧连接。
7、进一步,蓄压环座的截面形状为直角三角形。
8、进一步,行动轮的外侧设置有周圈等角度的突出板部。
9、进一步,从动轮由内轮毂和橡胶外胎构成,内轮毂为金属轮毂,橡胶外胎为橡胶材质。
10、进一步,磁块距行动轮中线的距离大于铲板距行动轮中线的距离。
11、进一步,密封座的底部固定安装有位于活动架上方的强制顶头。
12、本发明具备如下有益效果:
13、本申请提供的一种水下行走装置,车体通过磁力吸附在船底,保证了车体在船底行走时的稳定性。磁块产生的磁力足以让装置牢牢地贴合在船底,无论水流如何冲击,它都能保持稳定。行进电机带动行动轮转动,使得装置能够在船底自由移动,实现全方位的清洗。
14、在车体的前端设置了一块铲板。当装置在船底行走时,铲板会不断地刮动船底,将附着在上面的寄生物刮除。这种方式能够彻底清除船底的污垢,恢复船底的清洁。
15、此外,这种水下行走装置大大降低了施工人员的劳动强度。传统的船底清洗工作需要人工潜水进行,不仅工作量大,而且存在安全风险。而使用这种装置,只需要操作人员在船上远程控制,就可以实现对船底的清洗,既安全又高效。
技术特征:1.一种水下行走装置,其特征在于,包括:
2.根据权利要求1所述的水下行走装置,其特征在于,车体(1)的表面固定安装有控制中枢(6),控制中枢(6)控制着行进电机(200)的运动,车体(1)尾部连接的电线管束(10)对控制中枢(6)进行供电。
3.根据权利要求1所述的水下行走装置,其特征在于,车体(1)的表面固定安装有调距座(13),调距座(13)的内部活动安装有密封座(12),密封座(12)的底部以及调距座(13)的内侧共同构建有存液腔(130),磁块(15)与密封座(12)同轴固定,车体(1)的背部固定安装有与存液腔(130)相通的送水管(11),送水管(11)的另一端与加压水泵相连。
4.根据权利要求3所述的水下行走装置,其特征在于,推架(5)活动安装在车体(1)的内部,且推架(5)的端部和车体(1)的内侧之间设置有顶簧(9),推架(5)的侧部开设有泄压槽(500),调距座(13)的侧部开设有将存液腔(130)与外部相通的排液孔(131)。
5.根据权利要求4所述的水下行走装置,其特征在于,磁块(15)的外侧固定套装有蓄压环座(17),调距座(13)的顶部螺纹连接有调距螺栓(8),且调距螺栓(8)的底部固定有位于密封座(12)上方的开关(16),推架(5)的侧部固定安装有活动架(7),且活动架(7)活动安装在调距座(13)上,活动架(7)的中部位于存液腔(130)中,活动架(7)的中部铰接有位于蓄压环座(17)下方的传动压杆(18),且传动压杆(18)和活动架(7)之间依据拉簧(180)连接。
6.根据权利要求5所述的水下行走装置,其特征在于,蓄压环座(17)的截面形状为直角三角形。
7.根据权利要求5所述的水下行走装置,其特征在于,行动轮(2)的外侧设置有周圈等角度的突出板部。
8.根据权利要求5所述的水下行走装置,其特征在于,从动轮(3)由内轮毂(300)和橡胶外胎(301)构成,内轮毂(300)为金属轮毂,橡胶外胎(301)为橡胶材质。
9.根据权利要求8所述的水下行走装置,其特征在于,磁块(15)距行动轮(2)中线的距离大于铲板(4)距行动轮(2)中线的距离。
10.根据权利要求8所述的水下行走装置,其特征在于,密封座(12)的底部固定安装有位于活动架(7)上方的强制顶头(14)。
技术总结本申请涉及水下机械相关技术领域,公开了一种水下行走装置,为了解决船底因寄生物繁多而导致清理难度大的问题,通过车体上设置有磁块,依据磁块产生的磁力将车体吸附在船底,保证行进电机带动行动轮转动过程中,通过行动轮在船底上的运动实现车体沿船底稳定运动,与此同时,在车体的前端设置有铲板,车体在船底运动过程中,利用铲板对船底的刮动,铲板将附着在船底的寄生物刮除,实现对船底的清洗工作,利用本申请中所说的方式,可以实现机械化自动的对船底进行清洗,大大的降低施工人员的劳动强度。技术研发人员:徐欣,李文龙,黄春燕,熊鸣,冯小萌,黄小龙,高超飞受保护的技术使用者:北京琨毅科技有限公司技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240722/225581.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表