一种水下机器人关节
- 国知局
- 2024-08-01 06:57:08
本发明涉及机器人,尤其是涉及一种水下机器人关节。
背景技术:
1、多关节水下机器人因其出色的机动性和灵活性,在海洋勘探、水下建设和巡检任务中扮演着至关重要的角色。尽管如此,传统多关节水下机器人的关节设计常受限于简单构造,导致在特定场景下,如复杂地形的适应性和操作精度方面的限制。现有的关节在简化力传递和提供结构稳定性方面虽然有效,但在对复杂动态环境的响应及适应性上存在不足。
2、此外,多关节机器人的关节通常需要更高级别的集成系统,以实现高效的力与运动控制,同时保持其在恶劣水下环境中的可靠性。在此背景下,迫切需要一种能够提供高度集成控制和增强环境适应性的新型关节设计,以克服现有技术的局限并提高机器人的运动性能。
技术实现思路
1、本发明的目的就是为了解决上述问题而提供一种水下机器人关节,作为多关节水下机器人系统的一部分,不仅保持了刚性关节的传统优点,同时通过集成先进的传感器和控制系统,极大地提高了关节的灵活性和控制能力。这种创新的关节设计旨在提升整个机器人系统在水下复杂环境中的性能,特别是在精确操作和环境适应性方面的能力,从而满足未来海洋作业的挑战。
2、本发明的目的通过以下技术方案实现:
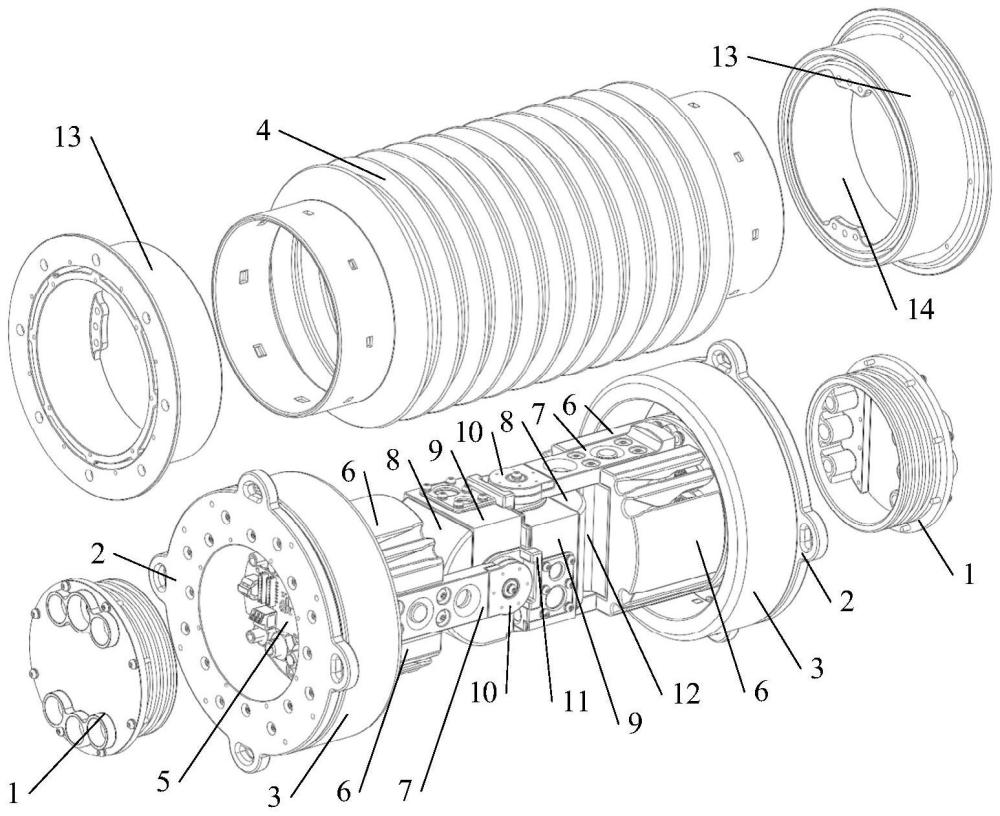
3、本发明的目的是提供一种水下机器人关节,所述水下机器人关节包括:关节电路密封盖、关节舱体、关节轴臂、关节电机、舵机中心连接板、轴臂连接杆、波纹管组件、控制组件、浮体组件;所述关节电路密封盖与关节舱体连接;所述关节电机设置2个,2个关节电机互相正交安装于水下机器人关节内部;所述关节轴臂连接关节电机和波纹管组件;所述舵机中心连接板连接2个关节电机;所述轴臂连接杆与关节轴臂连接;所述波纹管组件与关节舱体连接,用于密封并保护内部零部件免受海水腐蚀;所述浮体组件用于为水下机器人关节提供浮力;所述控制组件用于控制水下机器人关节运动。
4、进一步地,所述关节舱体的内侧安装有水密连接器;所述关节电路密封盖上开有6个接线孔,所述接线孔用于安装水密连接器;所述关节舱体内侧设有开孔,所述开孔用于安装水密连接器。
5、进一步地,所述浮体组件包括关节外部浮体、关节内部端侧浮体、关节内部中心浮体;所述关节外部浮体与关节舱体连接,用于提供浮力并保护关节舱体;所述关节内部端侧浮体安装于水下机器人关节内部的端部,用于提供浮力并保护安装于2个关节舱体的水密连接器;所述关节内部中心浮体安装于关节电机的外部,用于提供浮力并保护关节电机。
6、进一步地,所述波纹管组件包括橡胶波纹管、关节外环和关节内环;所述橡胶波纹管与关节内环配合安装;所述关节外环套在橡胶波纹管的端部的外侧;所述关节外环的外侧端面与2个关节内环的外侧端面齐平;所述关节内环与关节舱体配合安装。
7、进一步地,所述关节外环和关节内环通过胶水连接。具体连接方式如下:在保持橡胶波纹管、关节外环和关节内环相对位置固定不变的情况下,往关节外环和关节内环的缝隙中灌入海水用硫化胶水或海水用环氧树脂胶水,并静置使其固化。
8、可选地,所述胶水为海水用硫化胶水或海水用环氧树脂胶水。
9、进一步地,所述控制组件包括关节控制电路板、力矩传感器;所述关节控制电路板安装于关节舱体内部;所述力矩传感器安装于关节电机与关节轴臂的连接处,用于测量力矩并分别把力矩信号传给2个关节控制电路板。
10、进一步地,所述关节控制电路板包括控制器电路、传感器采集电路、接口转接电路以及相应的外围控制电路。
11、进一步地,所述关节控制电路板板载了1个电压传感器、1个电流传感器以及1个6轴姿态传感器。
12、进一步地,所述水下机器人关节的控制流程如下:
13、步骤1:关节控制电路板接收到上位机指令后控制打开关节电机的供电;
14、步骤2:执行关节电机自检程序;
15、步骤3:判断关节电机是否发生故障,如果否,则执行步骤4,如果是,则执行步骤9;
16、步骤4:关节控制电路板开始接收上位机下达的关节控制指令;
17、步骤5:关节控制电路板采集扭矩传感器、电压传感器、电流传感器以及6轴姿态传感器数据;
18、步骤6:通过各项传感器数据判断关节电机是否发生故障,如果否,则继续执行,如果是,则执行步骤9;
19、步骤7:关节控制电路板输出关节电机的控制信号;
20、步骤8:关节控制电路板上报关节电机的状态信息,执行步骤4;
21、步骤9:关节控制电路板断开关节电机的供电;
22、步骤10:关节控制电路板上报关节电机的故障代码。
23、进一步地,所述水下机器人关节为水下蛇鳗形机器人关节。
24、进一步地,所述水下机器人关节包括:
25、2个关节电路密封盖、2个关节舱体、2个关节外部浮体、1个橡胶波纹管、2个关节控制电路板、4个关节内部端侧浮体、4个关节轴臂、2个关节内部中心浮体、2个关节电机、2个力矩传感器、1个舵机中心连接板、4个轴臂连接杆、2个关节外环和2个关节内环。
26、进一步地,所述的2个关节电路密封盖位于整个关节的两端,采用轴向密封的方式分别与2个关节舱体配合安装。关节电路密封盖开有6个接线孔用于安装水密连接器。
27、进一步地,所述的2个关节舱体位于整个关节的两端,其内测有开孔用于安装水密连接器,主要用于耐受海水压力并保护舱内的零部件。
28、进一步地,所述的2个关节外部浮体位于整个关节的两端,分别安装于2个关节舱体,其主要用于提供浮力并保护2个关节舱体。
29、进一步地,所述的1个橡胶波纹管位于整个关节的外侧,其两端开有小孔与2个关节内环配合,主要用于密封并保护内部零部件免受海水腐蚀。
30、进一步地,所述的2个关节控制电路板分别安装于2个关节舱体内部,其板载了1个电压传感器、1个电流传感器以及1个6轴姿态传感器。电压传感器用于测量关节电机9的供电电压,电流传感器用于测量关节电机9的供电电流,6轴姿态传感器用于测量其所在关节控制电路板5相对于大地坐标系的姿态。关节控制电路板5的作用包括:第一,采集各个传感器的信号并通过can总线上传给上位机;第二,接收can总线上上位机的指令并将指令转化为具体的关节电机9的控制信号;第三,提供经过该电路板的上下行供电和can通信的转接接口。
31、进一步地,所述的4个关节内部端侧浮体两两分别对称安装于整个关节内部的两端,主要用于提供浮力并保护安装于2个关节舱体的水密连接器。
32、进一步地,所述的4个关节轴臂两两分别对称安装于整个关节内部,其中2个关节轴臂分别用于连接2个关节电机的输出轴与2个关节内环,另外2个关节轴臂分别用于连接2个关节电机的虚轴与2个关节内环。关节轴臂7与关节电机9的输出轴和虚轴均采用螺栓固定的方式,关节轴臂7与关节内环14采用卡扣与螺栓组合固定的方式。
33、进一步地,所述的2个关节内部中心浮体分别安装于2个关节电机的外部,主要用于提供浮力并保护2个关节电机。
34、进一步地,所述的2个关节电机互相正交安装于整个关节内部,主要用于提供关节弯曲的动力,其包含1个输出轴与1个虚轴。输出轴位于关节电机9一侧,用于关节电机9的动力输出。虚轴在关节电机9的另一侧并位于输出轴的中垂线上,用于使关节电机9能够稳定的顺着输出轴的中垂线输出旋转运动。
35、进一步地,所述的2个力矩传感器分别安装于2个关节电机输出轴与对应关节轴臂的连接处,主要用于测量力矩并分别把力矩信号传给2个关节控制电路板。
36、进一步地,所述的1个舵机中心连接板分别安装于整个关节的中心,主要用于连接2个关节电机。
37、进一步地,所述的4个轴臂连接杆两两分别位于4个关节轴臂的内侧,主要用于连接成对的2个关节轴臂以提高2个关节电机输出扭矩的稳定性。
38、进一步地,所述的2个关节外环分别位于橡胶波纹管两端的外侧,主要用于固定橡胶波纹管。
39、进一步地,所述的2个关节内环分别位于橡胶波纹管两端的内侧,主要用于固定橡胶波纹管并与2个关节舱体分别配合安装。
40、进一步地,配合安装1个橡胶波纹管、2个关节外环和2个关节内环的过程:首先将1个橡胶波纹管与2个关节内环配合安装,使得橡胶波纹管两端的小孔与2个关节内环的外部凸起一一对应。然后将2个关节外环套在橡胶波纹管的两端外侧,使得2个关节外环的外侧端面分别于2个关节内环的外侧端面齐平。在保持橡胶波纹管、2个关节外环和2个关节内环相对位置固定不变的情况下,往2个关节外环和2个关节内环的缝隙中灌入海水用硫化胶水,并静置使其固化。
41、可选地,也可以往2个关节外环和2个关节内环的缝隙中灌入海水用环氧树脂胶水。
42、与现有技术相比,本发明的有益效果体现在以下几个方面:
43、1)本发明提出的一种水下机器人关节,结构简单,采用关节电机直接驱动的方案,可以具备较高的可靠性以及驱动效率。
44、2)本发明提出的一种水下机器人关节,其中两个正交安装的电机和力矩传感器提供精准的动力和测量,橡胶波纹管增强外部灵活性,内外环结构保证稳定性。
45、3)本发明提出的一种水下机器人关节,采用硫化胶或者环氧树脂灌封的方案进行密封,具备更好的防水性。
46、4)本发明提出的一种水下机器人关节,内置了扭矩传感器、电压传感器、电流传感器以及6轴姿态传感器,结合控制程序可以实现更好的控制精度和响应速度。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225573.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。