水下机器人伴航式数能同传装置及方法
- 国知局
- 2024-08-01 06:57:05
本发明属于水下机器人无线充电领域,具体为水下机器人伴航式数能同传装置及方法。
背景技术:
1、当今时代,人类对海洋的认识与开发日渐迫切,水下机器人作为探索海洋的利器,因其越来越高的智能性和长期值守的独有优势在各种水下无人系统中脱颖而出,得到了广泛的关注。但受auv自身体积、重量和水下环境的限制,单一个体的auv水下作业时间往往只能持续数十小时,作业范围有限,所携电能耗尽后必须再次补充电能才能继续工作,传统的充电方式需要将auv回收至母船或陆地,充电完毕后再次布放,繁琐的回收布放操作严重地限制了auv的作业效率和作业范围,制约着以auv为主的未来留海观测、集群等系统的发展。如果能实现auv水下完全自主充电,将进一步发挥auv的长期值守优势,助推水下无人系统的进一步发展。
2、得益于陆上无线充电技术的发展,水下无线充电的应用一举突破了水下有缆充电对auv灵活性的限制,并克服了水下电插头易受海水腐蚀的难题。基于电磁感应原理的水下充电发展较早,主要应用在auv与静基座之间,电磁感应充电需要尽可能让发射线圈的磁力线穿过接收线圈的磁芯,因此要求收发线圈双方距离较近(一般为毫米级),收发线圈两者之间的距离或距离的变化值一旦过大,则会造成收发线圈之间的互感急剧降低,从而导致能量传输失败或效率极低。此外,电磁感应充电装置配置的金属磁芯往往体积、重量过大,对于auv而言并非最优之选。自2007年开始逐渐发展起来的基于电磁谐振原理的无线充电因其传输距离远(最远达到米级)、无需笨重的磁芯等优点逐渐成为了无线充电的主流。但是电磁谐振对收发双方的参数、距离等有着严苛的要求,一旦参数变化则会造成失谐,轻则影响能量传输效率,重则带来安全问题。因此国内外学者近年来研究了多种控制策略来改善电磁谐振对参数要求的严苛性,使基于电磁谐振原理的无线充电得以广泛应用。
3、auv在水下工作效率不仅受能源制约,水下通信是另一个影响auv作业效能的重要因素。目前auv水下通信主要依靠水声通信,少数采用激光通信。水声通信传输距离较远,但具有易暴露、时延长、带宽窄、速率低的特点,难以满足未来auv伴航充电过程中对信息的高速、实时性交互需求。结合水下无线充电技术,可发展以电磁波通信为主的近距离通信,作为声学通信的有效补充手段。原理上无线电能传输是电磁波能量传输,对电磁波实施调频、调幅能够实现电磁波的数字化通信,这种携带能量的数字信号具有抵抗系统自身以及外界环境扰动的优点,可降低水下通信的误码率,相比水声通信拥有更高的通信速率。
技术实现思路
1、基于上述愿景和技术基础,本发明研制了一套适用于水下机器人伴航条件下的较远距离、大功率无线数能同传装置,创新auv的应用模式,利用移动式补给平台在机动状态下完成对auv的能源补充,使auv全寿命周期水下高效率工作成为可能,拓展了auv在时间维度与空间维度上的应用长度和广度。因此该发明对于提高auv的实际应用价值、系统整体作业效能、拓宽应用领域均具有十分重要的现实意义。本发明目的是通过一套基于电磁谐振原理的水下无线充电装置实现水下机器人伴航充电,通过变频、变结构控制实现能量与数据的同步传输。
2、本发明为实现上述目的所采用的技术方案是:
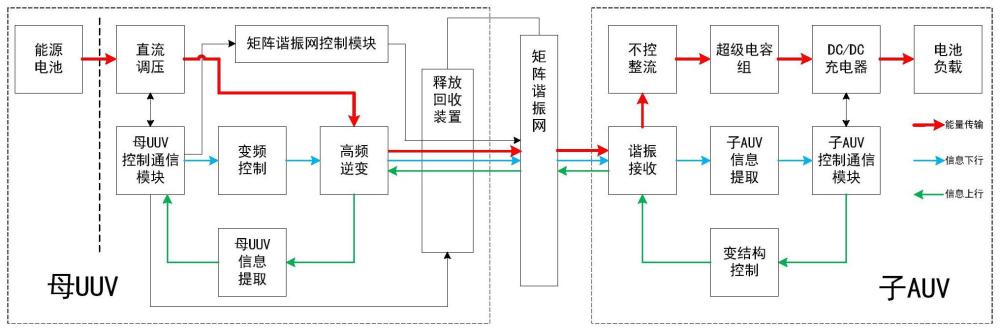
3、水下机器人伴航状态下数能同传装置,移动式补给平台即母uuv和受电平台即子auv之间通过矩阵谐振网实现数据信息以及能量的传输,其中,
4、所述母uuv包括:能源电池、直流调压模块、高频逆变模块、母uuv控制通信模块、变频控制模块、母uuv信息提取模块;
5、所述子auv包括:谐振接收模块、不控整流模块、超级电容、dc/dc充电器、电池负载、子auv控制通信模块、变结构控制模块以及子auv信息提取模块;
6、当进行能量传输时,能源电池中的能量依次通过直流调压模块、高频逆变模块、矩阵谐振网、谐振接收模块、不控整流模块、超级电容、dc/dc充电器传输给子uuv电池负载;
7、当进行数据信息传输时,母uuv控制通信模块发出的数据信息依次通过变频控制模块、高频逆变模块、矩阵谐振网、谐振接收模块、子auv信息提取模块发送给子auv控制通信模块;子auv控制通信模块反馈的数据信息依次通过变结构控制模块、谐振接收模块、矩阵谐振网、高频逆变模块、母uuv信息提取模块发送给母uuv控制通信模块。
8、所述母uuv还包括分别设于母uuv控制通信模块和矩阵谐振网之间的矩阵谐振网控制模块和释放回收装置。
9、所述矩阵谐振网包括功率线圈、控制信号线、节点控制开关以及碳纤维网格骨架,所述功率线圈和控制信号线均固定在碳纤维网格骨架上,网格的每个交叉点处设置有节点控制开关控制网格的组合谐振区域。
10、所述矩阵谐振网与矩阵谐振网控制模块相连,矩阵谐振网控制模块通过矩阵谐振网中的控制信号线控制节点控制开关的通断,实现改变矩阵谐振网中谐振区域的位置及面积。
11、水下机器人伴航式数能同传方法,包括母uuv和子auv之间的数据信息以及能量的传输,其中:
12、所述能量的传输具体为:母uuv中能源电池中的能量依次通过直流调压模块、高频逆变模块发送给矩阵谐振网,子auv中谐振接收模块中的线圈与矩阵谐振网中的线圈基于电磁谐振接收能量,并依次通过不控整流模块、超级电容、dc/dc充电器传输给子uuv电池负载;
13、所述数据信息的传输包括母uuv到子auv的数据信息下行传输以及子auv到母uuv的数据信息上行传输;
14、所述下行传输具体为:母uuv控制通信模块将数据信息依次通过变频控制模块、高频逆变模块发送给矩阵谐振网,子auv中谐振接收模块中的线圈与矩阵谐振网中的线圈基于电磁谐振接收数据信息,并通过子auv信息提取模块将数据信息发送给子auv控制通信模块;
15、所述上行传输具体为:子auv控制通信模块将数据信息发送给变结构控制模块,变结构控制模块控制谐振接收模块内的谐振子按照数据信息高低电平切入、切出谐振系统,从而在矩阵谐振网中的线圈内产生功率波动,母uuv息提取模块通过对高频逆变模块的功率检测提取上行信息并发送给母uuv控制通信模块。
16、子auv中的变结构控制模块控制谐振接收模块内的谐振子切入谐振系统时,谐振子从矩阵谐振网接收能量,当谐振子切出时,谐振子内存储的能量通过不控整流模块输入到超级电容中。
17、子auv位于矩阵谐振网的正下方,随着子auv的运动,母uuv中的矩阵谐振网控制模块通过矩阵谐振网中的控制信号线控制不同节点控制开关的通断,使子auv始终位于矩阵谐振网的谐振区域正下方,保持与子auv中谐振接收线圈与矩阵谐振网的磁谐振状态。能量传输过程中矩阵谐振网与母uuv航行方向呈平行关系。
18、本发明具有以下有益效果及优点:
19、1.本发明通过一套基于电磁谐振原理的无线充电装置,实现水下机器人伴航充电和数字通信。革新传统auv的工作模式及静态无线充电方式,使auv在行进间或工作过程中即完成能源补给,实现全寿命周期在水下工作,作业效能、实际应用价值得到极大地提升,拓展了auv应用领域。
20、2.所发明的可回收柔性矩阵谐振网,避免了水下机器人近距离伴航碰撞的风险。同时迎流面积、湿表面积小,降低了阻力,有利于母uuv的航行控制。
21、3.所发明的母uuv变频控制、子auv变结构控制机制,实现了能量与数字信号的通信道、同步、双向传输,相比传统的能量与信息分信道、分时传输,无需额外的独立通信装置,不仅提高了通信的实时性,也降低了整套系统的体积重量,节省了auv内部宝贵的空间。
22、4.所发明的子auv不控整流+可变容量超级电容组+dc/dc充电器组合策略,克服了母uuv与子auv相对位移造成的功率波动对电池负载的影响(在非线性控制等基础上进一步降低对电池负载的功率波动),增加了系统的稳定性与安全性,同时超级电容组的储能作用实现了子auv上行变结构无损通信,提高了系统整体传输效率。
23、5.矩阵谐振网内部的矩阵线圈可以通过节点控制开关动态调整与子auv谐振线圈的大小和方位,实现与子auv谐振跟踪定位,始终保持较高效率、较高功率的无线电能传输。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225566.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。