一种智能无人救生艇的制作方法
- 国知局
- 2024-08-01 07:00:49
本技术属于水面救生设备,尤其涉及一种智能无人救生艇。
背景技术:
1、溺水事件频发,溺水死亡已成为组成青少年死亡的重要原因。除加强安全教育外,水上救援能力也成为关注重点,与橡皮艇、快艇、救生船等传统救援方式相比,水面救生机器人具有方便、快捷、智能、操作简单、安全性高、受自然因素影响小等优势。我国幅员辽阔,海岸线较长,沿海城市多,在溺水事件频发背景下,水面救生机器人市场发展空间广阔。
2、现有的水面无人救生机器人一般采用远程遥控操作的智能化救援设备,配有拖带导引缆绳、救生圈、救生衣等装置,遇到险情时,救援人员从船上、岸上等位置将水面救生机器人抛掷水面,遥控其航行至落水人员身边,并将落水人员拖拽到安全区域。由于人员溺水的黄金救援时间只有数分钟,溺水区域水情复杂,而且需要专业人员进行进一步施救,现有水面无人救生机器人的救生受限于平台,无法承载更多的救援设备,感知能力不足,只能依赖操纵人员的目视观察,并寄希望于被救生人员尚有一定自救能力,这大大限制了溺水救援成功率。
3、因此,本申请设计了一种智能无人救生艇来解决上述的技术问题。
技术实现思路
1、为解决上述技术问题,本实用新型提出了一种智能无人救生艇。
2、为实现上述目的,本实用新型提供了一种智能无人救生艇,包括:
3、船体,所述船体上设置有救援平台;
4、打捞救援机构,包括设置在所述船体一端的打捞传送装置,所述打捞传送装置延伸至所述救援平台;所述打捞传送装置与所述船体之间设置有驱动组件;
5、控制机构,包括设置在所述船体上的高清摄像头组件和激光雷达,所述高清摄像头和所述激光雷达与控制模块电性连接。
6、优选的,所述打捞传送装置包括平行设置的第一安装侧板和第二安装侧板,所述第一安装侧板与所述第二安装侧板分别与所述船体转动连接;所述第一安装侧板与所述第二安装侧板之间设置有传送带,所述传送带的端部与所述救援平台对应设置。
7、优选的,所述驱动组件包括分别对称设置在所述第一安装侧板和所述第二安装侧板上的第一连接座,所述第一连接座与所述船体之间设置有转角驱动油缸。
8、优选的,所述第一安装侧板和所述第二安装侧板远离所述船体的一端设置有第一转轴,所述第一转轴上设置有打捞板,所述打捞板与所述打捞传送装置之间设置有偏转组件。
9、优选的,所述偏转组件包括设置在所述第一安装侧板和所述第二安装侧板上的第二连接座,所述第二连接座与所述打捞板端部的第二转轴之间铰接有打捞驱动油缸。
10、优选的,所述第一安装侧板和所述第二安装侧板上分别固接有护栏。
11、优选的,所述护栏远离所述船体的一端分别铰接有收集挡板,两所述收集挡板对应设置。
12、优选的,所述船体的顶端设置有防护侧栏,所述高清摄像头组件和所述激光雷达设置在所述防护侧栏上。
13、优选的,所述高清摄像头组件包括若干环境摄像头和一个深度摄像头,若干所述环境摄像头设置在所述防护侧栏上环形等间距布置,若干所述环境摄像头环绕所述激光雷达布置,所述深度摄像头布置在所述船体朝向所述打捞传送装置的位置。
14、优选的,所述控制模块包括船载远程控制系统和航控系统,所述船载远程控制系统包括5g工业路由器一和以太网交换单元一,所述5g工业路由器一与所述以太网交换单元一双向数据连接,所述太网交换单元与打捞救援机构、所述航控系统、所述高清摄像头和所述激光雷达数据连接。
15、与现有技术相比,本实用新型具有如下优点和技术效果:控制机构的高清摄像头组件以及激光雷达,分别用于实时采集并发送救援视频及落水人员目标三维距离信息到岸基系统的显示单元,以及实时采集并发送救援艇周边环境视频到岸基系统的显示单元,供救援人员远程操纵救援艇决策,激光雷达用于对救生艇周边环境及目标感知,用于自主航行及对于落水人员的精确定位;从而实现远程感知识别,远程快速自动定位,提高在复杂水域环境下对不同状态溺水人员的快速救援能力,保障溺水和救援人员的生命安全;当有人落水时,高清摄像头组件和激光雷达对落水人员进行定位后,将船体移动到附近的位置,使打捞传送装置对准落水人员,通过船体调节打捞传送装置的仰角,打捞落水人员,在打捞起溺水人员后抬起打捞传送装置,将救援打捞起的溺水人员平稳输送至救援平台,避免二次伤害;通过5g网络与控制模块进行指令数据及视频的交互,提高远程遥控时施工操作的实时性,同时集合救援艇智能自主航行、环境感知与目标识别定位,提高了溺水救援的快速反应、精准打捞与专业施救能力,也提高了救援人员在危险场景下对不同状态救援对象救援的安全性和成功率。
16、本实用新型能实现远程感知识别,远程快速自动定位,具有在复杂水域环境下对不同状态溺水人员的快速救援能力,保障溺水和救援人员的生命安全。
技术特征:1.一种智能无人救生艇,其特征在于,包括:
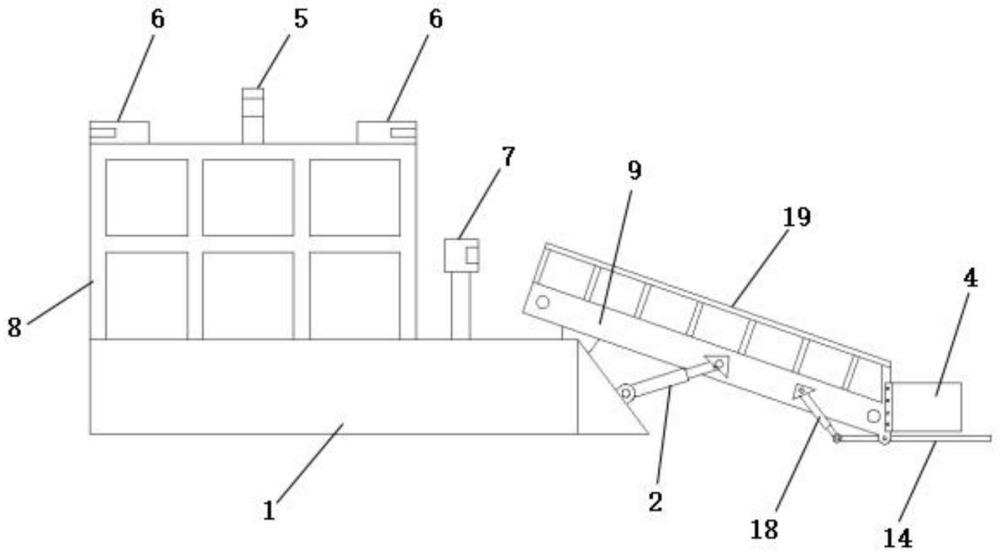
2.根据权利要求1所述的智能无人救生艇,其特征在于:所述打捞传送装置包括平行设置的第一安装侧板(9)和第二安装侧板(10),所述第一安装侧板(9)与所述第二安装侧板(10)分别与所述船体(1)转动连接;所述第一安装侧板(9)与所述第二安装侧板(10)之间设置有传送带(11),所述传送带(11)的端部与所述救援平台对应设置。
3.根据权利要求2所述的智能无人救生艇,其特征在于:所述驱动组件包括分别对称设置在所述第一安装侧板(9)和所述第二安装侧板(10)上的第一连接座(13),所述第一连接座(13)与所述船体(1)之间设置有转角驱动油缸(2)。
4.根据权利要求2所述的智能无人救生艇,其特征在于:所述第一安装侧板(9)和所述第二安装侧板(10)远离所述船体(1)的一端设置有第一转轴(15),所述第一转轴(15)上设置有打捞板(14),所述打捞板(14)与所述打捞传送装置之间设置有偏转组件。
5.根据权利要求4所述的智能无人救生艇,其特征在于:所述偏转组件包括设置在所述第一安装侧板(9)和所述第二安装侧板(10)上的第二连接座(17),所述第二连接座(17)与所述打捞板(14)端部的第二转轴(16)之间铰接有打捞驱动油缸(18)。
6.根据权利要求3所述的智能无人救生艇,其特征在于:所述第一安装侧板(9)和所述第二安装侧板(10)上分别固接有护栏(19)。
7.根据权利要求6所述的智能无人救生艇,其特征在于:所述护栏(19)远离所述船体(1)的一端分别铰接有收集挡板(4),两所述收集挡板(4)对应设置。
8.根据权利要求1所述的智能无人救生艇,其特征在于:所述船体(1)的顶端设置有防护侧栏(8),所述高清摄像头组件和所述激光雷达(5)设置在所述防护侧栏(8)上。
9.根据权利要求8所述的智能无人救生艇,其特征在于:所述高清摄像头组件包括若干环境摄像头(6)和一个深度摄像头(7),若干所述环境摄像头(6)设置在所述防护侧栏(8)上环形等间距布置,若干所述环境摄像头(6)环绕所述激光雷达(5)布置,所述深度摄像头(7)布置在所述船体(1)朝向所述打捞传送装置的位置。
10.根据权利要求1所述的智能无人救生艇,其特征在于:所述控制模块包括船载远程控制系统和航控系统,所述船载远程控制系统包括5g工业路由器一和以太网交换单元一,所述5g工业路由器一与所述以太网交换单元一双向数据连接,所述太网交换单元与打捞救援机构、所述航控系统、所述高清摄像头和所述激光雷达(5)数据连接。
技术总结本技术属于水面救生设备技术领域,公开了一种智能无人救生艇,包括:船体,船体上设置有救援平台;打捞救援机构,包括设置在船体一端的打捞传送装置,打捞传送装置延伸至救援平台;打捞传送装置与船体之间设置有驱动组件;控制机构,包括设置在船体上的高清摄像头组件和激光雷达,高清摄像头和激光雷达与控制模块电性连接。本技术能实现远程感知识别,远程快速自动定位,具有在复杂水域环境下对不同状态溺水人员的快速救援能力,保障溺水和救援人员的生命安全。技术研发人员:向前,铁进华,卢思思,张仁义,侯家骏受保护的技术使用者:武汉鱼鹰科技有限公司技术研发日:20231010技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240722/225746.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表