一种针对大型AUV的平台式海底接驳装置、海底接驳方法
- 国知局
- 2024-08-01 07:00:52
本发明涉及海底接驳装置领域,尤其涉及一种平台式的可实现大型auv接驳的海底接驳装置、海底接驳方法。
背景技术:
1、地球上最大的生态系统是海洋生态系统,地球上海洋面积约占地球总面积的71%,而且海洋中蕴藏着丰富的生物资源和矿产资源,因此海洋的探测、开发与利用得到各个国家越来越多的重视。无论是在海底勘探、水下救援、海洋科考,无人水下航行器(uuv)都发挥着重要作用。其中,由于自主式水下航行器(auv)能在水下执行多种任务,而无需脐带缆和实时的人类干预,具有极大的发展和应用潜力。目前,为提高auv的装载能力和续航能力,各国都在积极开展大型auv的研发。
2、海底观测网络作为探索和研究海洋的重要手段之一,在采集海底数据、海底生物资源和矿产资源勘探等方面有着不可替代的作用。auv可将采集的数据通过海底观测网络中的海底接驳装置与岸基站进行数据交换,并在其过程中海底接驳装置可对auv进行能源补充。
3、目前,海底接驳装置的形式主要分为以下几种:
4、一、导向罩式:auv直接通过导向罩引导进入装置内部。这种对接方式结构简单,对auv的改动小。但对auv的定位精度要求高,只适用于单一尺寸的auv,并且对经常对auv艏部进行撞击,存在隐患;
5、二、杆+滑盖式:auv艏部的v形导向机构使杆与auv锁紧,之后驱动滑盖将auv推至底部并加紧。这种对接方式可全方位对接,但auv艏部的导向机构会影响auv的运动性能并增加auv的消耗;
6、三、平台式:auv伸出抓取臂,抓取臂的挂钩与平台式的v形导向装置连接,在抓取臂到达导向装置末端后auv无法前进,此后auv向下移动,直到与平台接触并锁紧。这种对接方式能允许多种auv对接,但对auv的运动控制性和操纵性要求高。
7、总的来说,海底接驳装置的研究已经基本满足中小型auv的海底接驳需求。但针对大型auv的质量大、运动控制和操纵性能难度高等特点,目前大部分的海底接驳装置都很难满足要求。
技术实现思路
1、为了解决背景技术中存在的问题,本发明目的在于提供一种能够实现大型auv海底接驳的平台式海底接驳装置以及一种与该装置进行对接的大型auv对接接口,实现大型auv与海底观测网络的数据连接和能源补充。
2、为实现上述目的,本发明专利提供如下技术方案:
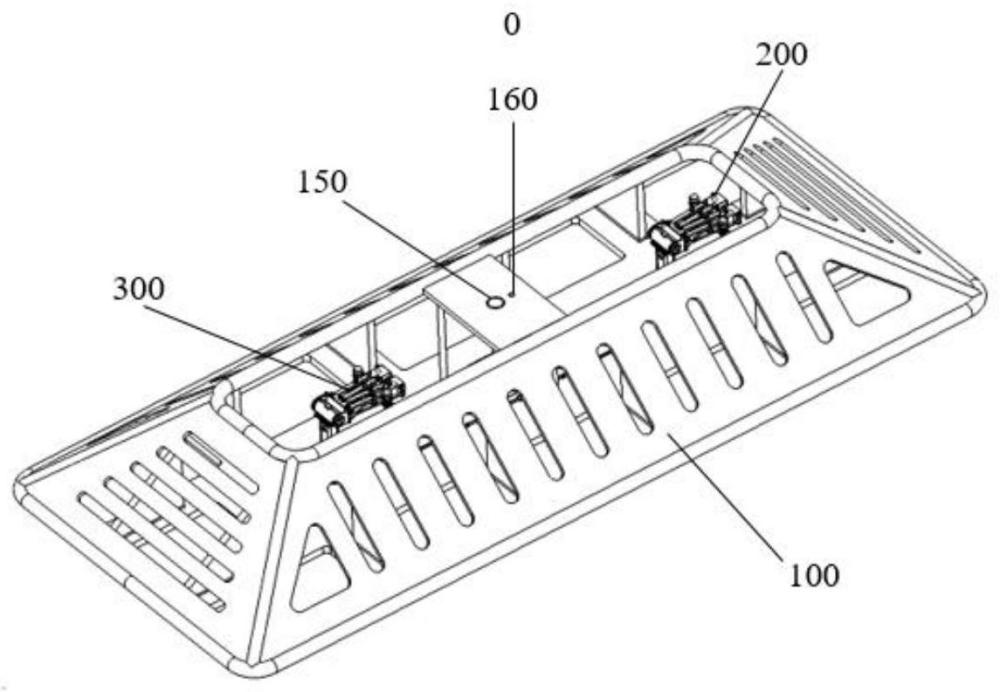
3、所述海底接驳装置包括对接平台和间隔布置于对接平台上的两个对接臂,所述大型auv位于所述对接平台的上方;两个对接臂的顶端均设有阻拦索,所述大型auv底部间隔布置有两组对接接口,两组对接接口之间的距离与两组对接臂之间的距离相等;所述对接接口包括抓钩,抓钩的底端设有一个钩槽,所述大型auv与海底接驳装置对接时,所述钩槽钩住所述阻拦索。
4、所述对接平台包括平台框架以及布置于平台框架内部的液压泵站、中央控制单元和阀控模块;所述液压泵站通过管道与所述阀控模块连通并对阀控模块供油,所述中央控制单元与所述阀控模块与电连接并通过所述阀控模块控制对接臂。
5、两个对接臂分别为阻拦臂和抓取臂,位于所述大型auv在行进方向上的前侧的抓钩的钩槽钩住所述阻拦臂的阻拦索,位于所述大型auv在行进方向上的后侧的抓钩的钩槽钩住所述抓取臂的阻拦索。
6、所述的每个对接臂包括从下到上依次连接的伸缩模块、俯仰模块、夹持模块和阻拦模块;所述伸缩模块的底端与所述平台框架固定连接,所述伸缩模块的顶端通过俯仰模块与夹持模块转动连接,所述阻拦模块包括所述阻拦索。
7、所述的伸缩模块用于控制所述对接臂的伸缩动作,所述伸缩模块包括伸缩方向为上下方向的伸缩油缸缸筒,伸缩油缸缸筒的顶端为伸缩端,底端与所述平台框架固定连接。
8、所述俯仰模块用于控制对接臂末端的俯仰动作,包括从下到上依次布置的俯仰油缸和连接架;所述俯仰油缸为具有旋转轴的摆动油缸,所述旋转轴水平布置,所述旋转轴与所述连接架固定连接并带动所述连接架同步转动,所述俯仰油缸的缸体与所述伸缩模块的顶端固定连接。
9、所述夹持模块用于控制对接臂末端的夹持动作,包括两个结构相同的夹持单元,每个夹持单元均包括夹持油缸缸筒、夹持油缸活塞杆、末端夹爪和四连杆机构;四连杆机构布置于所述连接架的上方,四连杆机构的上方布置有所述末端夹爪;所述连接架的上方还布置有夹持油缸缸筒,所述夹持油缸缸筒中套装有所述夹持油缸活塞杆;所述四连杆机构的顶端与所述末端夹爪铰接连接,所述四连杆机构的底端与所述连接架铰接连接;所述连接架与所述夹持油缸缸筒铰接连接,所述夹持油缸活塞杆的顶端从所述夹持油缸缸筒的顶部伸出后与所述四连杆机构铰接,所述夹持模块还包括用于auv对接时的视觉导引的水下摄像头和用于auv对接时的声学导引的超短基线应答器;每个夹持单元上均安装有至少一个超短基线应答器以及至少两个水下摄像头。
10、所述阻拦模块用于阻拦回拉大型auv,还包括液压绞盘;所述夹持模块的两侧各布置有一个液压绞盘,所述阻拦索的一端缠绕在第一侧的液压绞盘上,另一端依次穿过两个末端夹爪上开设的中心孔后缠绕在第二侧的液压绞盘上。
11、所述阀控模块分别与所述伸缩油缸缸筒、俯仰油缸、夹持油缸缸筒、液压绞盘中的油缸连通。
12、所述的阻拦臂和抓取臂沿第一方向间隔布置,所述的旋转轴沿与所述第一方向垂直的第二方向布置,所述的阻拦索沿第二方向布置,所述末端夹爪上的中心孔沿第二方向开设,两个液压绞盘分别布置于所述夹持模块在第二方向上的两侧。
13、所述对接接口还包括抓钩油缸缸筒和抓钩油缸活塞杆,所述抓钩油缸缸筒布置于所述抓钩的一侧,所述抓钩油缸缸筒内同轴套装有所述抓钩油缸活塞杆,所述抓钩油缸活塞杆的端部从所述抓钩油缸缸筒的底端伸出后与所述抓钩的中部固定连接并驱动所述抓钩相对大型auv转动,所述抓钩油缸缸筒与所述大型auv固定连接,所述抓钩的顶端与所述大型auv铰接连接。
14、所述对接接口还包括从上到下依次连接的水下电动推杆、钩锁连接法兰和单向钩锁,以及同轴套装于所述钩锁连接法兰内部的弹簧,以及安装于所述抓钩上的水下照明灯。
15、所述水下电动推杆安装于所述抓钩上,所述水下电动推杆的底端为伸缩端,且与下方的所述钩锁连接法兰顶部的法兰盘固定连接,所述钩锁连接法兰内设有向下开口的伸缩槽,所述伸缩槽内滑动布置有所述单向钩锁,所述单向钩锁的上端部伸入所述伸缩槽中,所述伸缩槽的底端设置有一个上宽下窄的阶梯槽,所述阶梯槽与所述单向钩锁顶端的限位机构配合布置,使得所述水下电动推杆向上收缩时,通过所述钩锁连接法兰带动所述单向钩锁向上滑动。
16、所述伸缩槽中套装有所述弹簧,所述弹簧的顶端与所述钩锁连接法兰固定连接,所述弹簧的底端与所述单向钩锁接触。
17、当阻拦索从外部与单向钩锁外侧接触时,弹簧收缩,阻拦索滑进钩槽;当阻拦索处于钩槽内时,若单向钩锁将钩槽出口关闭,则阻拦索始终处于钩槽内,若水下电动推杆向上收缩,则水下电动推杆通过所述钩锁连接法兰带动单向钩锁向上缩回,进而使得钩槽开启,此时阻拦索可滑出钩槽。
18、所述对接平台还包括布置于平台框架顶部的充电发送模块和水下wifi模块,所述充电发送模块与所述大型auv电连接并为所述大型auv供电,所述水下wifi模块用于与所述大型auv进行信息交互;所述充电发送模块以及水下wifi模块均与所述中央控制单元电连接并由所述中央控制单元控制。
19、所述海底观测网络包括如权利要求1~8任一所述的针对大型auv的平台式海底接驳装置、岸基站、接驳盒、光纤光缆。
20、所述的针对大型auv的海底接驳方法具体包括以下步骤:
21、s1)预对接:所述中央控制单元接收岸上基站发出的指令后,控制海底接驳装置伸出阻拦臂。
22、s2)对接:在所述大型auv靠近海底接驳装置的过程中,阻拦臂的俯仰模块转动,并张开末端夹爪,通过末端夹爪两侧的摄像头对主钩两侧的水下照明灯进行识别并调整所述阻拦臂的高度,使得阻拦臂的阻拦索能够滑进主钩的钩槽,接着将阻拦臂的阻拦索滑进主钩的钩槽内并拦停所述大型auv;所述大型auv被拦停后,所述阻拦臂的液压绞盘进行缓慢收绳,将大型auv拉回,然后阻拦臂的末端夹爪夹紧大型auv的主钩;当所述大型auv调整至水平状态后,所述抓取臂从海底接驳装置的对接平台中伸出,接着将抓取臂上的阻拦索滑进辅钩的钩槽,然后抓取臂的末端夹爪夹紧大型auv的辅钩;
23、其中,主钩为位于大型auv前侧的抓钩,辅钩为位于大型auv后侧的抓钩。
24、s3)信息交互和能源补充:所述阻拦臂和抓取臂同时将所述大型auv下拉至海底接驳装置的充电发送模块和水下wifi模块处,通过充电发送模块与大型auv上的感应连接器实现大型auv的无线充电,通过水下wifi模块和大型auv上的水下wifi模块将大型auv采集到的数据传输给中央控制单元后,通过海底观测网传回岸基站。
25、s4)分离:所述阻拦臂和抓取臂同时向上伸出并推离所述大型auv,所述大型auv的单向钩锁缩回,所述阻拦臂的阻拦索和抓取臂的阻拦索均从对应钩槽中滑出,海底接驳装置收回所述阻拦臂和抓取臂,所述大型auv与所述海底接驳装置完成分离并驶离海底接驳装置。
26、与现有技术相比,本发明的有益效果是:
27、1.本发明提出了一种新型的大型auv海底接驳装置,该装置主要包括对接平台和两个对接臂,两个对接臂分别为阻拦臂和抓取臂,阻拦臂末端具有阻拦索,可对大型auv进行阻拦回拉,两个对接臂可以改变大型auv并拖动其位置,平台式的结构不限制大型auv的形状和体积,能够极大地拓宽可对接大型auv的类型。
28、2.本发明中阻拦臂的阻拦索对大型auv进行柔性阻拦,通过液压绞盘中的阻尼制动器在阻拦过程中消耗auv的动能,因此不需要对auv的速度进行精准控制即可平稳地拦停auv,这种阻拦索柔性阻拦的方式明显降低了大型auv对接时的运动操控要求。
29、3.本发明中阻拦臂在大型auv接近其位置时,通过光学导引的方式使阻拦臂上的摄像头识别auv的位置并预测auv的路线。若auv的预测路线超出阻拦范围,则阻拦臂会进入预警模式,收回平台内部;若auv的预测路线在阻拦范围内,则阻拦臂会调整其位置和姿态,使阻拦索尽量与auv上的抓钩中心处于同一水平面中。该方式不需要在对接期间auv进行复杂操作,对auv的操纵性要求不高。
30、4.本发明提出了一种新型的大型auv对接接口,该接口主要包括两个抓钩和单向钩锁。两个抓钩分为主钩和辅钩,auv对接接口和接驳装置通过抓钩和对接臂完成对接。主钩与阻拦臂连接,辅钩与抓取臂连接。该对接接口不限制大型auv的质量和体积,因此可作为上述海底接驳装置的一种标准化auv对接接口,极大地丰富了与上述海底接驳装置进行对接的auv的种类和型号。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225749.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表