一种搭载绳驱机械臂的水下机器人及环抱方法
- 国知局
- 2024-08-01 07:02:37
本发明属于水下机器人,具体涉及一种搭载绳驱机械臂的水下机器人及环抱方法。
背景技术:
1、水下作业一直是海洋工程、科学研究以及救援行动中不可或缺的一部分。特别是在水下救援中,高效可靠的水下作业设备和技术能够提供关键支持,确保对遇险者的快速响应和有效救援。
2、水下救援是一项突发性强、时间紧迫、技术要求高、难度大、危险系数高的项目。水域环境复杂、水流湍急、潜水人员体力限制、环境差等因素都成为搜救阻碍。而水下机器人的出现,给水下救援带来了新的曙光。
3、目前的水下机器人多集中在采用刚性机械爪夹取人的肢体或衣物实现对遇难者的救援,其无法根据溺水者的具体情况进行调整,救援力度难以控制并且单一的夹持方式有给遇难者带来二次伤害的危险,也无法根据溺水者的特征进行调整,不够灵活和人性化。
技术实现思路
1、本发明的目的是为克服上述现有技术的不足,提供一种搭载绳驱机械臂的水下机器人。
2、为实现上述目的,本发明采用如下技术方案:
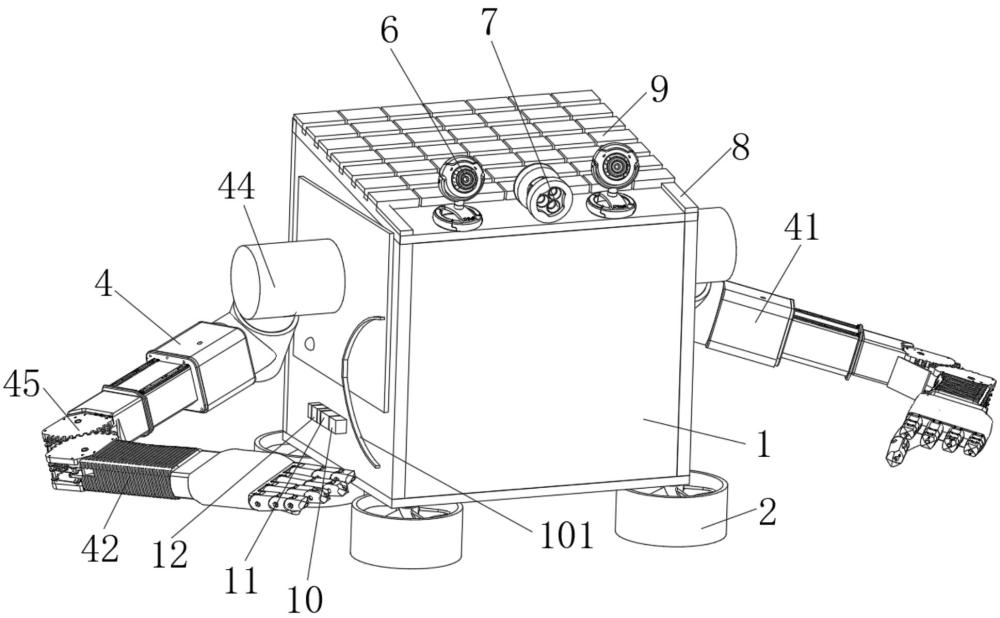
3、一种搭载绳驱机械臂的水下机器人,包括机器人本体,所述机器人本体上搭载有呼吸器;
4、所述机器人本体的底端设置若干第一推进器,所述机器人本体的后端设置若干第二推进器,所述机器人本体搭载有用来调整机器人浮心位置的可变浮力系统;
5、所述机器人本体的两侧设置有两个能够对人体躯干进行环抱的机械臂,所述机械臂的端部设置有用来检测遇难者呼吸的气流传感器;
6、所述机器人本体的顶端设置有摄像头、照明灯、声呐。
7、优选的,所述机械臂包括上臂单元、下臂单元、仿生手;
8、所述上臂单元的一端通过肩关节与机器人本体相连,所述上臂单元的另一端通过肘关节与下臂单元的一端相连,所述下臂单元的另一端与仿生手相连。
9、优选的,所述下臂单元的外壁面呈凹凸结构,所述下臂单元凹凸结构的凸起部上设置有薄膜压力传感器。
10、优选的,所述机器人本体上设置有对折叠后的机械臂进行卡合支撑的卡箍,所述卡箍与机器人本体进行转动配合,所述机器人本体上设置有用来控制卡箍转动的卡箍转动电机。
11、优选的,所述肩关节包括与机器人本体进行转动配合的肩关节电机,所述机器人本体的内侧设置有用来控制肩关节电机转动的肩关节驱动电机;
12、所述肩关节电机的输出端与肩关节转动轴相连,所述肩关节转动轴的另一端与上臂转动电机相连;
13、所述上臂单元包括可伸缩的上臂,所述上臂的一端与上臂转动电机的输出端固定连接,所述上臂的另一端与肘关节相连;
14、所述肩关节电机输出端的中心轴线与上臂的伸缩方向垂直,所述上臂转动电机输出端的中心轴线与上臂的伸缩方向平行。
15、优选的,所述上臂包括沿上臂伸缩方向进行滑动配合的第一上臂、第二上臂,所述第二上臂的外侧壁上设置有沿上臂伸缩方向延伸的第二滑轨,所述第一上臂的内侧壁上设置有与第二滑轨进行滑动配合的第一滑轨;所述第一上臂远离第二上臂的一端与上臂转动电机的输出端固定连接,所述第二上臂远离第一上臂的一端与肘关节相连;
16、所述第一上臂远离第二上臂端部内侧设置有伸缩电机,所述伸缩电机的输出端设置卷绕有伸缩钢丝绳的卷绕盘,所述伸缩钢丝绳的自由端与第二上臂固定连接;
17、穿过第一上臂的伸缩钢丝绳上套有伸缩复位弹簧,所述伸缩复位弹簧靠近上臂转动电机的一端设置弹簧定位板,所述弹簧定位板与第一上臂固定连接;
18、所述上臂缩短时,所述第二上臂上的第二滑轨压缩伸缩复位弹簧。
19、优选的,所述肘关节包括与第二上臂固定连接的第一齿轮传动部、与第一齿轮传动部进行啮合连接的第二齿轮传动部;所述第二齿轮传动部与下臂单元固定连接;
20、所述第一齿轮传动部齿轮端的中心轴处固定设置第一销轴,所述第二齿轮传动部齿轮端的中心轴处固定设置第二销轴,所述第一销轴上转动配合有肘关节轴套,所述肘关节轴套的另一端与第二销轴转动配合;
21、所述第一齿轮传动部、第二齿轮传动部的内部均呈延伸至齿端的空腔结构;
22、所述第一齿轮传动部、第二齿轮传动部的空腔之间设置有用来驱动第二齿轮传动部在第一齿轮传动部上啮合传动的驱动件;
23、所述驱动件包括若干设置在第二上臂内部的第一肘关节电机以及若干设置在下臂单元内部的与各个第一肘关节电机一一对应的第二肘关节电机;相对应的第一肘关节电机、第二肘关节电机的输出轴之间连有一根驱动钢丝绳,所述驱动钢丝绳的两端分别缠绕在相应第一肘关节电机、第二肘关节电机的输出轴上;相对应的第一肘关节电机、第二肘关节电机之间的驱动钢丝绳绕过若干用于张紧钢丝绳的滑轮,所述滑轮通过滑轮轴转动配合在第一齿轮传动部或第二齿轮传动部上。
24、优选的,所述第二齿轮传动部齿轮端的相邻齿之间设置有凸起,所述第一齿轮传动部齿轮端的齿上设置有沿圆周方向贯通的用来与凸起相配合的凹槽;
25、所述凸起沿第二齿轮传动部径向方向的顶端设置有用来感应凸起与相应凹槽之间沿第二齿轮传动部轴向方向挤压力的第一应变片。
26、优选的,所述第一齿轮传动部中相邻齿的齿根部设置有用来感应第一齿轮传动部、第二齿轮传动部之间的啮合力的第二应变片;
27、所述第一齿轮传动部中各个齿沿轴向的一侧上设置有用来感应第一齿轮传动部、第二齿轮传动部之间的啮合力的第三应变片。
28、本发明还提供一种搭载绳驱机械臂的水下机器人的环抱方法。
29、一种搭载绳驱机械臂的水下机器人的环抱方法,包括以下步骤:
30、步骤1:水下机器人以两个机械臂折叠的状态在水中进行自主航行,通过摄像头识别遇难者;
31、步骤2:摄像头识别到遇难者后,水下机器人向遇难者方向移动,到达遇难者附近后,取消卡箍对机械臂的固定,两个机械臂展开,同时水下机器人将遇难者位置发送给岸上救援中心;
32、步骤3:水下机器人缓慢贴近遇难者,判断遇难者的年龄和性别;
33、步骤4:根据遇难者性别及年龄,调节上臂的长度;
34、步骤5:水下机器人从遇难者的背部,将两个机械臂向前环抱遇难者躯干,在环抱夹紧的过程中,薄膜压力传感器感应到的压力逐渐增大,当薄膜压力传感器感应到的压力达到适合遇难者性别及年龄的环抱力后,两个机械臂停止夹紧遇难者;
35、步骤6:水下机器人环抱遇难者向岸边航行,并将航行路径发送给岸上救援中心;
36、步骤7:到达岸边后,水下机器人缓慢松开遇难者,将遇难者放置到地面上,以待医护人员施救;
37、步骤8:两个机械臂进行折叠,并通过卡箍进行固定,之后进入步骤1。
38、本发明的有益效果是:
39、(1)本发明水下机器人通过两个绳驱动机械臂对遇难者的躯干进行环抱,与现有的夹取人的肢体或衣物的方式相比,更加安全,同时环抱躯干的方式为遇难者提供了稳固支撑,提高救援成功率;另外,现有的夹取肢体或衣物的方式会受到遇难者身体状况、穿着等因素的限制,而本发明中绳驱动机械臂环抱躯干的方式可以更普遍地适用于不同情况下的遇难者,包括意识丧失、受伤或身体受限的情况,适用性更广。
40、(2)本发明中采用绳驱动的机械臂具备:
41、操作范围大:机械臂整体的结构设置,使机械臂可伸缩、可弯折,增大了运动空间及操作范围;
42、更轻便灵活:绳驱动机械臂相对于刚性机械臂更轻便灵活。
43、并通过薄膜压力传感器感应环抱力,将环抱力控制在合适的范围,防止给遇难者带来二次伤害的危险。
44、(3)本发明中下臂单元的外壁面呈凹凸结构,增加了环抱的摩擦力,下臂单元的外侧壁上包覆有硅胶,使得环抱人体感觉更加柔软和舒适,减少与机器臂接触时带来的不适感,并通过下臂单元上的薄膜压力传感器感应环抱力,将环抱力控制在合适的范围。
45、(4)在不需要机械臂作业的场合,本发明中机械臂可折叠固定到机器人本体两侧,降低了整体尺寸,有助于在有限空间中进行作业;有利于减小水下机器人的运行阻力,延长水下机器人的续航时间,并提高其作业效率;可以减少在狭窄或复杂环境中的碰撞风险,从而降低了机器人和周围设备的损坏风险,保障了水下作业的安全性和可靠性;而采用卡箍进行固定,可以确保折叠后的机械臂在行走或作业时保持稳定,避免了在水流或其他环境因素的影响下产生的摇摆或不稳定现象。
46、(5)本发明中通过第一应变片感应凸起与相应凹槽之间沿第二齿轮传动部轴向方向的挤压力,以此监测第一齿轮传动部、第二齿轮传动部沿第二齿轮传动部轴向方向的受力,进而反应出第一齿轮传动部、第二齿轮传动部沿第二齿轮传动部轴向方向的配合是否出现问题,以保证机器人的正常运行。
47、(6)本发明中通过第二应变片、第三应变片用来感应第一齿轮传动部、第二齿轮传动部之间的啮合力以及确定啮合位置,以此监测第一齿轮传动部、第二齿轮传动部的啮合传动,及早发现潜在故障,减少机器人零部件的磨损及损坏,延长使用寿命。
48、(7)本发明水下机器人可根据遇难者性别及年龄,调节上臂长度和环抱力,具备以下优势:
49、可实现个性化救援,不同性别和年龄段的人身体结构存在差异,通过根据性别和年龄调节上臂长度和环抱力,可以使水下机器人更好地适应不同的遇难者身体特征;
50、提高救援效率,根据性别和年龄调节上臂长度和环抱力可以帮助水下机器人更快速地环抱住遇难者,减少救援过程中的调整时间;
51、减少误伤风险,根据性别和年龄调节上臂长度和环抱力,可以减少水下机器人在救援过程中对遇难者身体的不必要摩擦或压力,降低误伤风险,确保救援过程的安全性。
52、(8)本发明设置太阳能电板实现水下机器人太阳能充电的功能,可节能环保、增加续航时间,并适应长时间任务。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225830.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表