轻量化电动无人应急救援船、控制方法、装置及存储介质与流程
- 国知局
- 2024-08-01 07:08:09
本技术涉及应急救援,特别是一种涉及轻量化电动无人应急救援船、控制方法、装置及存储介质。
背景技术:
1、无人救援船是一种高科技的水面救援工具,它通过自动化和智能化技术,有效替代了传统的人工救援方式。这种船只能够在水上应急情况下迅速启动,大幅扩展了救援的能力和范围。它具备携带多种救援装备和物资的能力,利用自主导航系统、智能控制系统以及自动化操作技术,能够独立执行复杂的救援任务,从而显著提升救援的效率和成功率。
2、无人救援船通过搭载的多种传感器,能够实现精准而高效的搜索和救援工作,及时将遇险人员从危险环境中救出,最大限度减少伤亡和财产损失。在面对突发事故或自然灾害时,无人救援船能够迅速作出反应,与人工搜救相比,它拥有更快的响应时间和更高的操作效率,能够在极短的时间内完成救援任务。这种无人救援船的应用,不仅提升了救援工作的质量和水平,还为救援领域带来了创新的可能性和机遇,进而促进了整个社会的安全和进步。
3、然而目前的无人救援船,大多功能单一,仅依靠自身的摄像头和雷达进行搜救,效率较低,而且不在搜救的时候几乎无任何作用,只能够在仓库闲置。因此亟待一种可有效利用无人救援船,扩展其功能性,又能够显著提升搜救效率的轻量化电动无人应急救援船、控制方法、装置及存储介质。
技术实现思路
1、本技术实施例提供了一种轻量化电动无人应急救援船、控制方法、装置及存储介质,针对目前技术存在的功能单一、搜救效率低下等问题。
2、本发明核心技术主要是集成了轻量化电动无人救援船、无人机和智能控制方法,通过无线通信、雷达、声呐、摄像组和地理信息系统(gis)技术,实现对落水人员的快速定位、识别和救援,同时具备水面垃圾清扫功能。
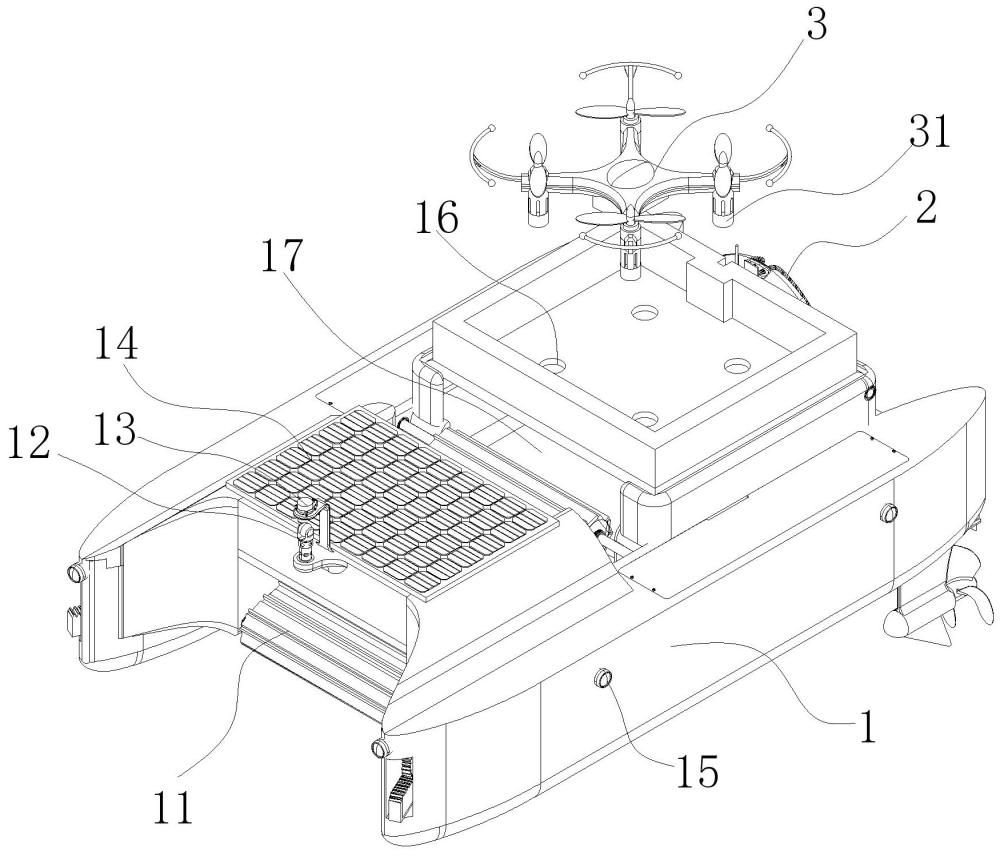
3、第一方面,本技术提供了一种轻量化电动无人应急救援船,包括:
4、船只,前端设有用于收集水上漂流垃圾的清扫机构和第一摄像组以及多色警示灯,顶部设有太阳能板和机舱,顶部下方设有与清扫机构配合的垃圾仓,后端设有推进螺旋桨;机舱内设有供无人机定位和充电的定位槽;
5、无人机,每个旋翼底部设有支撑脚,且每个支撑脚能够与对应的定位槽配合实现充电,该无人机中间底部设有第二摄像组和电动锁结构以及扬声器;
6、救生圈,安装于船只后端侧面,通过线缆与无人机的电动锁结构连接,并能够被无人机拉起,且能够被电动锁结构松开掉落于指定位置;
7、船只与无人机均设有无线通信模块,能够无线通信连接,且船只上还设有雷达和声呐以及多个探照灯。
8、第二方面,本技术提供了一种轻量化电动无人应急救援船控制方法,包括以下步骤:
9、s00、响应于地面站的救援指令,船只控制无人机升空进行搜救工作,并将多色警示灯切换为红色闪烁状态;
10、s10、无人机通过线缆吊起救生圈升空配合船只进行搜救;
11、s20、船只通过第一摄像组收集水面视频数据、通过雷达收集周围雷达数据以及通过声呐收集水下声呐数据;无人机巡航收集高空视频数据;
12、s30、综合水面视频数据、雷达数据、水下声呐数据以及高空视频数据,识别追踪疑似落水人员并定位,同步上传至地面站;
13、s40、根据无人机和船只当前位置分别规划路线,同时行动展开救援;
14、s50、无人机或船只接近疑似落水人员后,基于水面视频数据和高空视频数据判断落水人员判断是否为落水人员,并与地面站通讯远程进行再次确认;
15、s60、待确认为落水人员后,无人机飞行至落水人员附近上方并通过电动锁解开救生圈,同时通过扬声器与落水人员沟通;
16、s70、救援结束后,无人机返回船只,船只进入清扫模式并返回地面站重新安装救生圈和维护工作。
17、进一步地,s00步骤之前,船只在清扫模式时,通过第一摄像组收集水面视频数据实时判断是否有落水人员。
18、进一步地,第一摄像组像头实时判断是否有落水人员的具体步骤为:
19、通过红外热成像捕捉到水面上的热源点,识别出与周围环境温差明显的落水者;
20、标记为人体落水事件,并记录落水者的位置坐标,通过图像分析初步评估其生命状态;
21、上传信息至地面站和无人机。
22、进一步地,通过图像分析初步评估其生命状态的具体步骤为:
23、从连续的视频流中按帧提取图像,并使用背景减除技术区分落水者与背景,再应用人体检测算法识别每一帧中的落水者位置;
24、利用人体姿态估计模型识别落水者的关节关键点,并从关键点的位置和时间序列中提取特征;
25、基于预设的挣扎或求救或游泳动作特征,通过机器学习方法构建行为分类模型;
26、输入提取的特征到该行为分类模型中,预测落水者的行为状态。
27、进一步地,若预测落水者处于游泳动作,升起无人机对其进行警示沟通并上报地面站。
28、进一步地,s30步骤中,船只接入互联网获取当前定位的气象数据,并将气象数据、水面视频数据、雷达数据、水下声呐数据以及高空视频数据转换至统一的坐标系统和时间基准,以确保数据间的时空一致性;
29、在地理信息系统平台上,以高空视频数据中的图像作为底图,叠加雷达数据的数据点,标记船只位置、无人机位置、障碍物位置以及疑似落水人员位置,并进行颜色或图标的区分;将声呐数据转换为水下地形图,与高空视频数据的图像结合,通过颜色深浅表示水深;在地理信息系统平台上,显示气象数据;
30、利用gis软件生成可视化的态势感知图。
31、进一步地,s30步骤中,气象数据和雷达数据采用wgs84坐标系统,水面视频数据和高空视频数据均通过提取视频中的gps信息并转换为wgs84坐标系统,声呐数据通过将声呐坐标转换到船只的本地坐标系,利用船只的gps信息转换为wgs84坐标系统;
32、将所有数据的时间戳调整到同一个基准;
33、将转换后的数据整合,创建一个新的数据结构,该数据结构包含所有数据。
34、第三方面,本技术提供了一种电子装置,包括存储器和处理器,存储器中存储有计算机程序,处理器被设置为运行计算机程序以执行上述的轻量化电动无人应急救援船控制方法。
35、第四方面,本技术提供了一种可读存储介质,可读存储介质中存储有计算机程序,计算机程序包括用于控制过程以执行过程的程序代码,过程包括根据上述的轻量化电动无人应急救援船控制方法。
36、本发明的主要贡献和创新点如下:1、与现有技术相比,本发明通过将轻量化电动无人救援船、无人机、智能控制方法、无线通信、雷达、声呐、摄像系统和gis技术有机集成,实现了从水面到空中、从水上到水下的立体化、全方位应急救援能力。这不仅扩展了传统无人救援船的功能,使其不仅能执行搜救任务,还能进行水面垃圾清扫,提高了日常作业的实用性和效率,避免了设备闲置的问题。
37、2、与现有技术相比,本发明中提出了一套创新的控制方法,通过无人机与船只的紧密协同,如无人机吊起救生圈配合搜救,实现了对落水人员的快速定位、识别与救援,显著提升了搜救效率和精确度。特别是结合了水面视频、雷达、水下声呐和高空视频数据的综合分析,使得对疑似目标的追踪和定位更为准确,减少了误判率,加速了救援响应时间。
38、3、与现有技术相比,本发明通过红外热成像、图像分析、人体姿态估计模型和机器学习技术,对落水人员的生命状态进行初步评估,这是对传统搜救技术的重大改进。它使得救援过程中能快速判断落水者是否处于紧急状态,及时采取最合适的救援措施,提高了救援的成功率和针对性。
39、4、与现有技术相比,本发明整合gis技术和气象数据,创建了高精度的可视化态势感知图,为地面站提供了全面的救援现场信息。这一创新不仅增强了指挥调度的科学性,也确保了救援行动的高效协同,尤其是在复杂环境和恶劣天气条件下,能够有效指导救援决策。
40、5、与现有技术相比,本发明中详细阐述了如何将不同来源和格式的数据(包括气象、雷达、视频、声呐)转换并整合至统一的坐标系统和时间基准下,解决了数据异构性问题,确保了数据的时空一致性,为后续的分析和决策提供了可靠的基础。
41、6、与现有技术相比,本发明通过技术创新,显著提高了应急救援的效率、智能化水平和适应性,为水上应急救援领域带来了革命性的变化,不仅提升了救援质量和响应速度,也为增进公共安全和社会福祉作出了重要贡献。
42、本技术的一个或多个实施例的细节在以下附图和描述中提出,以使本技术的其他特征、目的和优点更加简明易懂。
本文地址:https://www.jishuxx.com/zhuanli/20240722/226331.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。