一种水下船舶清洗机器人
- 国知局
- 2024-08-01 07:19:08
本发明涉及海洋船舶工业领域,尤其是一种水下船舶清洗机器人。
背景技术:
1、船舶作为重要的交通工具,在海洋中航行时,其船体表面常常会附着各类海洋生物,如藤壶、海蛎等。随着时间的推移,这些海洋生物会不断积累,增加与水流的摩擦,导致船体行驶阻力增加,航行速度降低,燃油消耗增加,运输成本上升。同时,海洋生物产生的分泌物还可能对船体表面造成腐蚀,长时间不清理这些附着物甚至会损坏船体结构。因此,船舶表面附着物清洗显得尤为重要。
2、目前,船舶清洗主要采用人工清洗和机器人清洗两种方式。人工清洗需要潜水员手持清洗工具潜入深水中进行清洗,存在着作业人员危险性高、清洗时间长、效率低等问题。现有水下清洗机器人采用焊接框架结构,在装配、运输及使用过程中,焊接不良时易产生开裂、温度变形等问题。现有的机器人清洗设备对曲面船体表面因海生物引起的凹凸不平自适应能力较差,难以保证空化射流有效靶距,导致清洗效果不稳定;硬质旋转钢刷的贴附力难以控制,容易破坏船体涂层。针对不同的附着物情况,现有的清洗系统无法自主切换空化射流和电动刷盘两种清洗方式,调节关键参数比如旋转钢刷的贴附力度,这些问题制约了水下清洗机器人的清洗效率。
技术实现思路
1、本技术的目的在于提供一种水下船舶清洗机器人,采用stm32f4系列单片机控制方案。该机器人采用刷盘和空化射流相结合的清洗方式,配备四个水平推进器和四个竖向推进器,以保持在水中的稳定姿态。利用弹簧履带行走机构,实现机器人在曲面船体表面稳定爬行。采用铝合金和不锈钢杆结构机架设计,可有效避免焊缝裂纹等缺陷,且维修更加方便。本机器人具有高效的清洗能力,刷盘适应性强,可适用于曲率较大的船体表面,清洗效果好,操作简便,适用于海上或港口进行船舶清洗。
2、本技术实施例提供了一种水下船舶清洗机器人,包括:
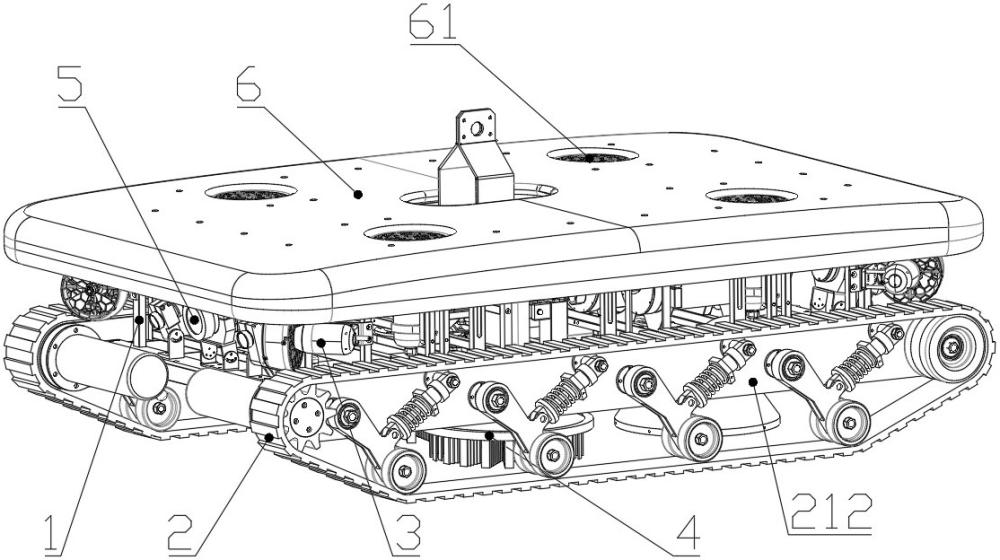
3、主体框架;所述主体框架包括机架,机架由多根杆结构通过螺栓连接而成;
4、行走机构;所述行走机构包括内侧固定板,内侧固定板的前后两端分别安装有驱动轮以及从动轮,驱动轮与从动轮之间并列设置有多个通过压缩弹簧可上下移动的导向轮,导向轮转动连接在导向轮固定连杆的一端,导向轮固定连杆的另一端转动连接在内侧固定板上;导向轮固定连杆的中部铰接连接有压缩弹簧,压缩弹簧的另一端固定连接在内侧固定板上;多个导向轮、从动轮以及驱动轮的外缘设置有履带;
5、推进机构;所述推进机构包括水平推进器以及竖向推进器,水平推进器固定连接在机架外两侧,前后各两个,水平方向呈45°对称排列;所述竖向推进器固定在机架内部四角位置,竖向排列;
6、清洗机构;所述清洗机构包括刷盘以及空化射流盘;所述刷盘转动连接在清洗模块座a上,清洗模块座a的中部通过固定支座b铰接有防水电动伸缩杆,防水电动伸缩杆的另一端通过固定支座a铰接在机架上,固定支座b两侧的清洗模块座a上各固定有一个固定支座d,两个固定支座d与固定支座b共线;固定支座d上铰接有连杆,连杆呈拐型,连杆另一端与固定支座c铰接连接,固定支座c固定在机架上;所述空化射流盘位于刷盘的侧面;
7、传感与控制系统;所述传感与控制系统包括安装在机架前后两侧的led灯及摄像头,包括安装在机架内的深度传感器、温湿度传感器以及陀螺仪,还包括安装在机架下端的超声测距传感器;
8、浮力模块;所述浮力模块安装于机架的顶部,浮力模块上对应竖向推进器开设有通孔。
9、进一步地,机架的中间顶部安装有起吊挂钩,起吊挂钩向上穿过浮力模块;机架的尾部安装有固定机器人防水线缆的线缆固定环。
10、进一步地,导向轮固定连杆与压缩弹簧构成y型;内侧固定板与机架固定连接,内侧固定板的底部与下方履带具有间隔,所述导向轮位于间隔空间内;所述导向轮由两个半轮组成,安装在导向轮固定连杆的两侧。
11、进一步地,刷盘通过联轴器、固定轴a、固定轴b以及固定法兰固定连接在清洗模块座a上。
12、进一步地,固定支座a两侧的机架上各固定连接有一个限位支架,限位支架呈直角三角形,限位支架的直角短边与机架固定连接,限位支架的直角长边两端上螺接有限位螺栓,限位螺栓下方对应在清洗模块座a上固定有对位螺栓。
13、进一步地,空化射流盘与清洗模块座b固定连接,喷管旋转座固定在空化射流盘中心位置,喷管固定在喷管旋转座上,喷头通过螺纹固定在喷管尾端,射流管固定座固定在机架尾部,喷管旋转座和射流管固定座之间通过射流软管连接,高压射流从射流管固定座流向喷管旋转座,经过喷管从喷头喷出,形成空化气泡,同时反作用力带动喷管旋转。
14、进一步地,机架内并排安装有配电舱、控制舱以及电机驱动舱;所述配电舱内安装变压模块;所述深度传感器固定在控制舱盖上;温湿度传感器以及陀螺仪安装于控制舱内,控制舱内还安装有单片机;所述电机驱动舱内置刷盘电机驱动器以及履带电机驱动器。
15、清洗船壁时,上位机和控制手柄发出控制指令,水平推进器执行平移指令,使机器人靠近待清洗船舶;随后,竖向推进器执行左翻或右翻指令,使机器人反转至底部大致与待洗船壁平行;接着,竖向推进器执行贴壁指令,四个竖向推进器正转产生推力,将机器人推向船壁并产生压力,完成船壁的贴壁动作;
16、当清洗船底时,上位机和控制手柄发出控制指令,机器人执行下潜指令和平移指令,运动至船底;随后,竖向推进器执行翻转指令,使机器人翻转180度至底部大致与船底平面平行;然后竖向推进器发出贴壁指令,完成船底的贴壁动作;
17、机器人贴壁后,上位机发送指令打开刷盘和空化射流双清洗机构;当刷盘电机中的编码器监测到电机电流增加到设定阈值时,可以判断该区域附着物较厚,此时机器人先利用高效的刷盘钢刷进行快速清理,附着物变薄后,机器人切换旋转空化射流喷盘,进行进一步清理;
18、当刷盘电机电流突增时,可以判断刷盘与船壁间的摩擦力增大,此区域附着物较厚,此时降低履带速度;电流突减时,可以判断刷盘与船壁之间的摩擦力减小,此区域附着物较薄,此时增大履带速度,通过上述调节,增强了清洗的针对性;
19、根据清洗效果的需要,通过调节竖向推进器的推力,可以调整导向轮的上下位移;这种调整能够控制空化射流盘与船体的喷射距离,确保空化射流清洗的稳定性和效果。
20、本发明的有益效果是:
21、1、提高机器人机体的整体可靠性和可装备性
22、通过采用螺栓连接的硬质氧化铝合金制成主体框架,替代传统的焊接结构,可有效避免焊缝开裂和热变形问题,实现快速模块化装配;
23、2、提高机器对曲面、凹凸不同附着海生物船体的适应性
24、行走系统采用具有良好越障能力的不锈钢316l弹簧式导向轮设计,可紧密贴合船体。同时,通过调节竖向推进系统推力,控制空化射流喷嘴与船体的喷射距离,确保空化射流清洗的稳定性和效果;
25、3、提高机器对船体无损、高效清洗能力。
26、集成电动钢刷刷盘和旋转空化射流两种清洗模式,根据海洋生物附着物的厚度自适应切换,对较厚区域先采用高效刷盘清理,附着物变薄后切换为空化射流彻底清洗,全面提升清洗效率。配备可调节贴附力度的电动伸缩刷盘系统,通过检测刷盘电机电流变化间接评估附着物密度,自适应决定履带前进速度,可不受摄像头采集到的图像限制,在水质浑浊,摄像头无法看清时使用,程序自适应决定采用空射流清洗或采用刷盘清洗。
本文地址:https://www.jishuxx.com/zhuanli/20240722/227082.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表