车辆转向控制方法和设备与流程
- 国知局
- 2024-08-01 07:33:42
本申请涉及汽车领域,尤其涉及一种车辆转向控制方法和设备。
背景技术:
1、汽车转向系统对汽车的操纵性和安全性至关重要,作为汽车关键部件之一的转向系统,转向系统始终是汽车研究领域中的重点。在转向过程中,汽车的转向特性不仅与方向盘转角和车速等呈强非线性变化关系,也存在转向“灵”与“轻”的矛盾,这直接影响驾驶员的手感力,增加了驾驶员的操纵难度。
2、目前,线控转向控制方法中,对于手感力的控制通常是线控助力转向系统根据当前整车车速信号(vehicle speed signal,vss)确定方向盘扭矩,根据手轮方向盘角度信号(hands wheel actuator angle signal,has)以及转向角度信号(gear sign signal,gss)确定方向盘扭矩的增益值,从而确定线控助力转向系统中电机控制单元的输入信息,最终影响手感力的大小。
3、但是,通过上述线控转向控制方法,驾驶员并不能获得准确的手感力反馈,导致驾驶员的驾驶体验变差。
技术实现思路
1、本申请提供一种车辆转向控制方法和设备,用以解决现有技术中线控转向控制方法无法准确反馈手感力的问题。
2、第一方面,本申请提供一种车辆转向控制方法,包括:
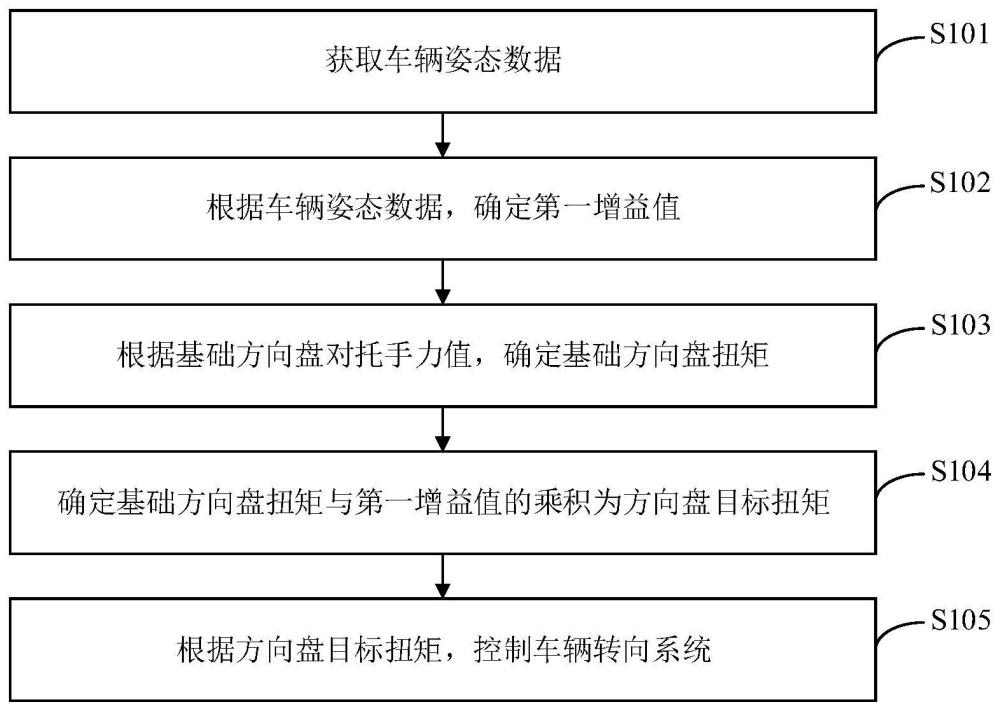
3、获取车辆姿态数据,车辆姿态数据包括vss、has、路轮输入轴角速度信号(roadwheel actuator angle speed,ras)、gss以及路轮电机扭矩;
4、根据车辆姿态数据,确定第一增益值,其中,第一增益值用于修正基础方向盘扭矩;
5、根据基础方向盘对托手力值,确定基础方向盘扭矩;
6、确定基础方向盘扭矩与第一增益值的乘积为方向盘目标扭矩;
7、根据方向盘目标扭矩,控制车辆转向系统。
8、在一些实施例中,根据车辆姿态数据,确定第一增益值,包括:
9、通过查找vss、has、ras以及标定路轮电机扭矩的映射关系表,确定vss、has、ras对应的标定路轮电机扭矩;
10、将路轮电机扭矩除以标定路轮电机扭矩,得到第一增益值。
11、在一些实施例中,车辆姿态数据还包括侧向加速度las和横摆角速度yvs;
12、方法还包括:
13、根据las确定第二增益值;
14、根据yvs确定第三增益值,其中,第二增益值、第三增益值均用于修正基础方向盘扭矩;
15、确定基础方向盘扭矩与第一增益值的乘积为方向盘目标扭矩,包括:
16、确定基础方向盘扭矩与第一增益值、第二增益值、第三增益值的乘积为方向盘目标扭矩。
17、在一些实施例中,根据基础方向盘对托手力值,确定基础方向盘扭矩,包括:
18、根据vss确定基础方向盘对托手力值;
19、根据has确定第四增益值和第五增益值;
20、根据gss,确定基础方向盘对托手力值与第四增益值的乘积,或者基础方向盘对托手力值与第五增益值的乘积为基础方向盘扭矩。
21、在一些实施例中,根据方向盘目标扭矩,控制车辆转向系统,包括:
22、根据方向盘目标扭矩,控制下一周期的手轮电机扭矩。
23、第二方面,本申请提供一种控制器,包括:存储器和处理器;
24、存储器用于存储计算机程序;
25、处理器用于执行存储器存储的计算机程序,实现第一方面及第一方面任一种实施例中的车辆转向控制方法。
26、第三方面,本申请提供一种线控转向系统,包括手轮电机、路轮电机以及第二方面中的控制器;控制器与手轮电机电连接,控制器与路轮电机电连接。
27、第四方面,本申请提供一种车辆,包括第三方面中的线控转向系统。
28、第五方面,本申请提供一种计算机可读存储介质,该计算机可读存储介质中存储有计算机程序,计算机程序被处理器执行时用于实现第一方面及第一方面任一种实施例中的车辆转向控制方法。
29、第六方面,本申请提供一种计算机程序产品,该计算机程序产品包括计算机程序,计算机程序被处理器执行时实现第一方面及第一方面任一种实施例中的车辆转向控制方法。
30、本申请提供的车辆转向控制方法和设备,根据车辆姿态数据确定第一增益值,并采用第一增益值修正基础方向盘扭矩,得到方向盘目标扭矩,最终根据方向盘目标扭矩控制车辆转向系统。其中,由于车辆载重、车速、路面等均会影响路面附着系数,对应的第一增益值也不同,采用第一增益值修正基础方向盘扭矩,转向控制时能够向驾驶员反馈更符合真实行车情况下的手感力,提升了驾驶员在不同场景下的驾驶体验。
技术特征:1.一种车辆转向控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述车辆姿态数据,确定第一增益值,包括:
3.根据权利要求1所述的方法,其特征在于,所述车辆姿态数据还包括侧向加速度las和横摆角速度yvs;
4.根据权利要求3所述的方法,其特征在于,所述根据基础方向盘对托手力值,确定所述基础方向盘扭矩,包括:
5.根据权利要求1-4中任意一项所述的方法,其特征在于,所述根据所述方向盘目标扭矩,控制车辆转向系统,包括:
6.一种控制器,其特征在于,所述控制器包括:存储器和处理器;
7.一种线控转向系统,其特征在于,所述系统包括手轮电机、路轮电机以及如权利要求6所述的控制器;
8.一种车辆,其特征在于,所述车辆包括:如权利要求7所述的线控转向系统。
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机程序,所述计算机程序被处理器执行时用于实现如权利要求1-5任一项所述的车辆转向控制方法。
10.一种计算机程序产品,其特征在于,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现权利要求1-5任一项所述的车辆转向控制方法。
技术总结本申请提供一种车辆转向控制方法和设备。该方法包括:获取车辆姿态数据,车辆姿态数据包括车速VSS、手轮方向盘角度HAS、路轮输入轴角速度信号RAS、转向角度信号GSS以及路轮电机扭矩;根据车辆姿态数据,确定第一增益值,其中,第一增益值用于修正基础方向盘扭矩;根据基础方向盘对托手力值,确定基础方向盘扭矩;确定基础方向盘扭矩与第一增益值的乘积为方向盘目标扭矩;根据方向盘目标扭矩,控制车辆转向系统。本申请的方法,提高了手感力反馈的准确性。技术研发人员:吕登科,向守智,史明宇,冯朋晓,叶亮受保护的技术使用者:杭州擎威科技有限公司技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/227894.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表