一种防爆矿井积水检测机器人的制作方法
- 国知局
- 2024-08-01 07:35:48
本技术涉及矿用机器人,尤其涉及一种防爆矿井积水检测机器人。
背景技术:
1、在煤矿的生产作业中,巷道和采掘工作面出现淋水的状况不容忽视,该状况不仅使劳动环境的空气温度和湿度增大,影响劳动生产率、职工身体健康和开采出煤炭的质量,而且矿井水会腐蚀矿井下的各种金属设备、支架、轨道等,缩短其使用寿命。更危险的是,当发生突然涌水或其水量超过矿井排水能力时,轻则造成局部停产,重则可能造成淹井,造成财产损失和工作人员伤亡。
2、由于矿井水的存在,生产过程中必须安装专用的管路和水泵进行排水。因此,能够应用于煤矿领域,实时准确的检测煤矿矿井积水的检测机器人拥有广阔的应用前景。利用矿井积水检测机器人可替工作人员深入环境复杂的矿井内部,进行积水检测作业使得积水可以及时清理,不仅可有效地预防矿井因积水造成作业环境恶化,设备损坏和煤炭质量下降,更重要的是保护矿井工作人员的人身安全免受煤矿积水的危害。
技术实现思路
1、针对上述问题,本实用新型提供一种防爆矿井积水检测机器人。
2、为实现上述目的,本实用新型所采用的技术方案为:
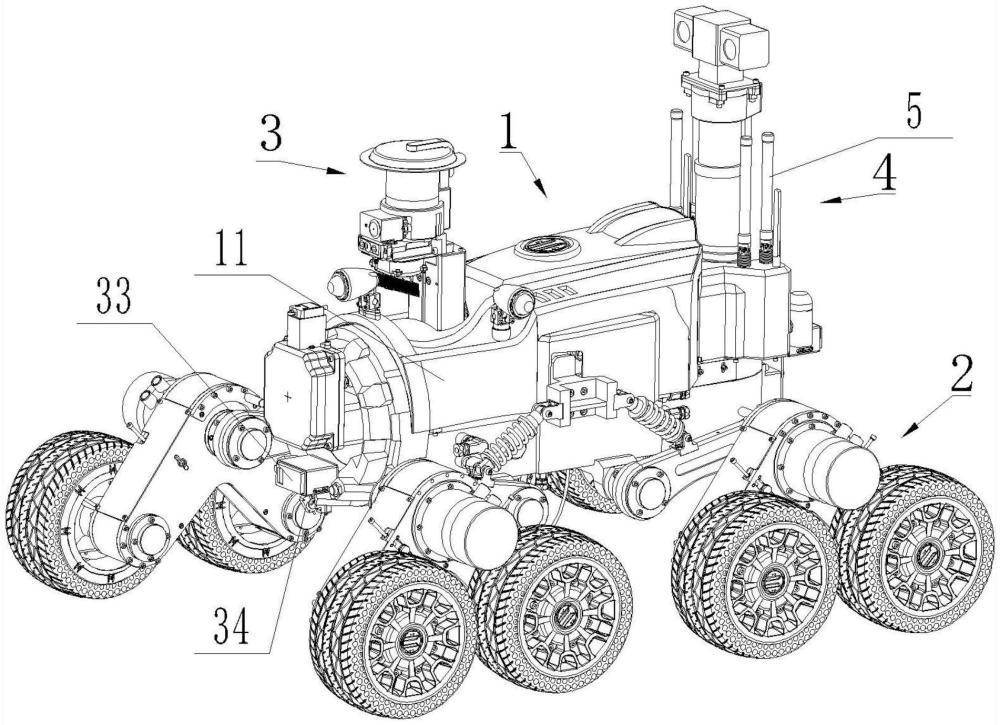
3、一种防爆矿井积水检测机器人,包括车体组件和双驱悬挂系统,车体组件作为整体的安装机体,双驱悬挂系统安装于车体组件上;
4、两个双驱悬挂系统为一组,两组双驱悬挂系统分别安装于车体组件两侧,单组双驱悬挂系统中的两个双驱悬挂系统分别安装于车体组件一侧的前后两端;每个车体组件上共安装四个双驱悬挂系统;
5、双驱悬挂系统包括行走机构和连接机构;行走机构与连接机构转动连接;连接机构与车体组件转动连接;
6、行走机构包括两个车轮组件、一个行走外壳、一个电机组件、一个电机轴组件、两个行走轮轴组件、两条传动同步带;
7、行走外壳的前后两端分别与一个车轮组件连接;车轮组件上连接有行走轮轴组件;
8、行走外壳中间位置贯穿连接有电机组件;电机组件上设有电机轴组件;
9、电机轴组件分别与两个行走轮轴组件通过两条传动同步带连接;
10、电机组件依次通过电机轴组件、行走轮轴组件和传动同步带与车轮组件相连。
11、进一步的,连接机构包括摆臂、摆臂-行走机构连接座、摆臂-车体连接座和减震器;摆臂通过摆臂-行走机构连接座与行走外壳转动连接;
12、摆臂上还转动连接有摆臂-车体连接座,固定连接有减震器;
13、车体组件括车体、防爆灯、四个减震器连接座、充电组件和防爆声光报警器;车体上设有防爆腔,车体内部的电器元件和充电组件均安装在防爆腔内,利用充电组件完成对机器人的充电作业;防爆灯和防爆声光报警器安装在车体上,防爆声光报警器在防爆矿井积水检测机器人启动后即开启,用于提醒周边行驶人员和车辆;两组双驱悬挂系统分别安装在车体两侧,单组双驱悬挂系统中的两个双驱悬挂系统分别安装于车体前后两端;四个减震器连接座分别与四个双驱悬挂系统一一配合使用,两个减震器连接座为一组,两组减震器连接座也安装于车体两侧,单组减震器连接座中的两个减震器连接座安装于车体一侧的前后两端;减震器连接座与减震器固定连接;车体与摆臂-车体连接座固定连接。
14、进一步的,摆臂-行走机构连接座包括一个转动轴,转动轴与行走外壳固定连接,与摆臂转动连接;
15、摆臂-车体连接座也包括一个转动轴,与摆臂转动连接,与车体固定连接。
16、进一步的,行走外壳呈倒“v”字型结构;行走外壳上安装有限位块。
17、进一步的,行走机构还包括张紧组件,张紧组件设于电机轴组件与行走轮轴组件之间,张紧组件连接在行走外壳上,张紧组件与传动同步带接触。
18、进一步的,张紧组件包括调整螺钉、张紧轮轴和张紧轮,行走外壳上设有与调整螺钉配合使用的滑槽,调整螺钉与行走外壳的滑槽连接,调整螺钉与张紧轮轴固定连接,张紧轮轴外侧同轴线套设有张紧轮,张紧轮与传动同步带接触。
19、进一步的,单个车轮组件包括一个车轮和一个减速机,减速机位于车轮内部,与车轮同轴线相连,减速机一端与行走外壳一端连接;
20、电机组件包括电机和电机壳,电机壳与电机固定连接,电机壳与行走外壳连接;
21、电机轴组件包括一个同轴线套设在电机外侧的电机连接轴和同轴线套设在电机连接轴外侧的两个同步带轮;
22、行走轮轴组件包括一个与减速机相连的行走轴和一个同轴线套设于行走轴外侧的同步带轮;
23、电机轴组件中的同步带轮与行走轮轴组件中的同步带轮通过传动同步带连接。
24、进一步的,所述防爆矿井积水检测机器人还包括控制组件、摄像机云台组件和无线传输系统;控制组件、摄像机云台组件和无线传输系统均安装于车体组件上,且控制组件与无线传输系统通讯连接。
25、进一步的,控制组件包括控制系统、激光导航系统、烟雾传感器、避障传感器和沟道检测组件;控制系统、激光导航系统、烟雾传感器、避障传感器和沟道检测组件均固定安装在车体上,激光导航系统、烟雾传感器、避障传感器和沟道检测组件分别与控制系统通讯连接,控制系统与无线传输系统通讯连接,控制系统通过无线传输系统将信号传输至工作站监控系统,并接收工作站监控系统发出的指令。
26、进一步的,摄像机云台组件包括摄像机、云台安装架、多级缸和弹簧电缆;多级缸一端与车体固定连接,另一端安装有云台安装架,云台安装架上可拆卸安装有摄像机,摄像机还通过弹簧电缆与控制系统连接,通过控制系统和无线传输系统(全向玻璃钢5g天线)上传至工作站监控系统;
27、云台安装架上安装的摄像机可以在水平面的360°范围内以及在俯仰±90°范围内旋转,多级缸可以调整云台安装架的高度,从而使摄像机拥有更大的巡检范围,可有效检测矿井积水区域,整个摄像机云台组件通过螺钉与车体组件固定连接。
28、本实用新型的一种防爆矿井积水检测机器人的有益效果为:
29、本实用新型的防爆矿井积水检测机器人的双驱悬挂系统由于行走机构和连接机构转动连接,使得行走机构具有一定的自由度,进而使前方的车轮可以扬起一定的角度,进而增强越障能力;
30、另外,本实用新型的防爆矿井积水检测机器人安装的双驱悬挂系统相比安装常规单轮悬挂系统,由于车轮数量增加,相对与原来的单轮,对地面的压强减半,接地比压变小,因此越障能力和抗沉陷能力更佳;
31、同时,由于单个行走机构由原来的一个车轮变为了两个,使得防爆矿井积水检测机器人中的双驱悬挂系统中的两个车轮位于常规的单轮悬挂系统的单个车轮的两侧,进而导致防爆矿井积水检测机器人一侧的两个双驱悬挂系统的两个外侧车轮的轴距相比使用单轮悬挂系统变大,同时两个内侧车轮的轴距相比使用单轮悬挂系统变小,使得防爆矿井积水检测机器人车体的最前端的车轮和最后端的车轮之间的距离增大,也使得防爆矿井积水检测机器人越障时底盘离地距离增加,提高防爆矿井积水检测机器人的越障能力。
32、本实用新型的防爆矿井积水检测机器人适用于在地形崎岖或路面泥泞积水地区工作,可有效提升防爆矿井积水检测机器人在上述恶劣工况行走作业时的通过性和稳定性;
33、进一步的,在遇到泥泞打滑路面时,由于本实用新型的防爆矿井积水检测机器人具有八个车轮,当其中一个车轮陷入沟壑或在泥泞路面打滑时,其它车轮也因具备驱动能力使整个防爆矿井积水检测机器人脱困;并且本实用新型的防爆矿井积水检测机器人在越过台阶或凸台时,车轮还可以对高低面都施加有作用力,使其能更顺利的越障;
34、本实用新型的防爆矿井积水检测机器人中每个双驱悬挂系统都具有单独的电机驱动,通过传动同步带带动单个双驱悬挂系统的前方的车轮和后方的车轮转动,可通过改变车体左右两侧的双驱悬挂系统中车轮转速实现按不同转弯半径进行差速转向和原地转向;
35、本实用新型的防爆矿井积水检测机器人,在避障传感器和沟道检测组件配合下,激光导航系统实现按规划好的路径自主行驶;并可与操作人员进行实时通信,通过摄像机云台组件高效的替代人工在环境复杂的矿井内完成积水检测任务,有效减少工作人员的工作量;
36、本实用新型的云台安装架上安装的摄像机可以在水平面的360°范围内以及在俯仰±90°范围内旋转,多级缸可以调整云台安装架的高度,从而使摄像机拥有更大的巡检范围,可有效检测矿井积水区域。
本文地址:https://www.jishuxx.com/zhuanli/20240722/228086.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表