一种EPS系统快速转向振荡抑制方法与流程
- 国知局
- 2024-08-01 07:38:33
本发明涉及汽车转向器,尤其涉及一种eps系统快速转向振荡抑制方法。
背景技术:
1、作为电动汽车整车系统中必不可少的组成部分,转向系统是影响汽车操纵稳定性、行驶安全性、驾驶舒适性的关键部件,电动助力转向系统(electric power steering,eps)的发展改善了汽车转向力的控制特性,降低了驾驶人员的负担。随着汽车对性能的要求越来越高,对eps系统的性能提出了更高的要求。
2、经研究发现,对eps动态性能标定过程中,会模仿驾驶员在紧急避障场景下的快速转向动作,在测试过程中,有时会出现转向助力振荡的现象。
3、目前,对于上述问题的解决方法有以下两种:一种为减小转向电机闭环控制过程的pi参数,该方法可以抑制助力振荡现象,但由于pi参数变小后,会降低电机控制的响应速度,使得eps在快速转向时存在粘滞感;另一种限制输出到转向电机的电压,降低电机转速,避免转向过快而产生振荡,但该方法降低了电机输出功率,对快速转向要求高的场合不适用。
技术实现思路
1、本发明旨在至少解决相关技术中存在的技术问题之一。为此,本发明提供一种eps系统快速转向振荡抑制方法。
2、本发明提供一种eps系统快速转向振荡抑制方法,包括:
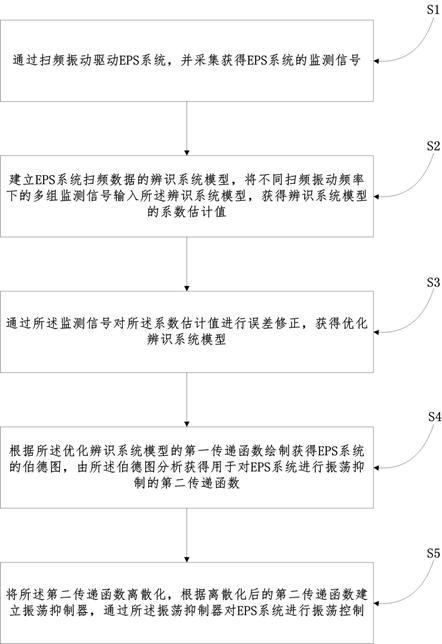
3、s1:通过扫频振动驱动eps系统,并采集获得eps系统的监测信号;
4、s2:建立eps系统扫频数据的辨识系统模型,将不同扫频振动频率下的多组监测信号输入所述辨识系统模型,获得辨识系统模型的系数估计值;
5、s3:通过所述监测信号对所述系数估计值进行误差修正,获得优化辨识系统模型;
6、s4:根据所述优化辨识系统模型的第一传递函数绘制获得eps系统的伯德图,由所述伯德图分析获得用于对eps系统进行振荡抑制的第二传递函数;
7、s5:将所述第二传递函数离散化,根据离散化后的第二传递函数建立振荡抑制器,通过所述振荡抑制器对eps系统进行振荡控制。
8、根据本发明提供的一种eps系统快速转向振荡抑制方法,步骤s1中的所述监测信号包括激励信号及响应信号,所述激励信号为用于驱动eps系统的扫频振动的电机目标电流值,所述响应信号为与eps系统连接的方向传感器扭矩值。
9、根据本发明提供的一种eps系统快速转向振荡抑制方法,步骤s1中的所述监测信号的表达式为:
10、;
11、;
12、其中,为采样时间,为时刻的激励信号,为激励信号对应的幅值,为信号频率,为激励信号对应的信号相位,为时刻的响应信号,为响应信号对应的幅值,为响应信号对应的信号相位。
13、根据本发明提供的一种eps系统快速转向振荡抑制方法,步骤s2中的所述辨识系统模型的表达式为:
14、;
15、其中,为辨识系统模型中的延迟算子,为建立的辨识系统模型,为当前周期辨识系统模型的输出值,为当前周期辨识系统模型的输入值,为第一待估计系数,为第二待估计系数。
16、根据本发明提供的一种eps系统快速转向振荡抑制方法,步骤s3进一步包括:
17、s31:将不同试验频率输入所述系数估计值后的辨识系统模型,获得不同试验频率下的幅值比及相位差;
18、s32:根据不同扫频振动频率下的多组监测信号,计算获得不同扫频振动频率下的幅值比及相位差;
19、s33:将不同试验频率及不同扫频振动频率一一对应,根据对应试验频率下的幅值比及相位差及对应扫频振动频率下的幅值比及相位差计算误差值;
20、s34:选择误差值的极小值对应的系数估计值作为最优估计值,以完成系数估计值进行误差修正,获得优化辨识系统模型。
21、根据本发明提供的一种eps系统快速转向振荡抑制方法,步骤s4中的所述第一传递函数的表达式为:
22、;
23、其中,为优化辨识系统模型的第一传递函数,为拉普拉斯算子,为第一传递函数的分母多项式对应的系数,为第一传递函数的分子多项式对应的系数。
24、根据本发明提供的一种eps系统快速转向振荡抑制方法,步骤s4中,所述第二传递函数的获得步骤进一步包括:
25、s41:通过所述伯德图分析获得eps系统的频率特性;
26、s42:通过所述频率特性建立用于对eps系统进行振荡抑制的第二传递函数。
27、根据本发明提供的一种eps系统快速转向振荡抑制方法,步骤s41中的所述频率特性包括低频截止频率、中频谐振频率及高频谐振频率。
28、根据本发明提供的一种eps系统快速转向振荡抑制方法,步骤s4中的所述第二传递函数的表达式为:
29、;
30、其中,为与振荡抑制器关联的第二传递函数,为低频截止频率,为中频谐振频率,为高频谐振频率,为第一阻尼比,为第二阻尼比。
31、本发明提供的一种eps系统快速转向振荡抑制方法,通过对eps系统进行扫频、数据分析和系统数学模型辨识,得到系统共振频率,设计稳定校正器,在中频谐振点降低系统增益,在高频谐振点提高系统的相频特性,以获得更大的相位裕度,使得系统稳定,消除快速转向手感振荡;
32、其次本发明通过实验获取数据、应用数学分析的方法,得到准确的系统数学模型,为解决eps系统快速转向振荡问题提供理论依据,大幅减少在实车标定eps转向手感过程中重复进行参数试验所需的损耗;
33、另外通过本发明提供的一种eps系统快速转向振荡抑制方法,不用减小电机闭环控制过程的pi参数,保证了系统的响应速度,快速转向时跟随性好,手感顺畅,同时无需限制输出到转向电机上的电压,保证了电机的输出功率,对快速转向要求高的场合也适用性强。
34、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:1.一种eps系统快速转向振荡抑制方法,其特征在于,包括:
2.根据权利要求1所述的一种eps系统快速转向振荡抑制方法,其特征在于,步骤s1中的所述监测信号包括激励信号及响应信号,所述激励信号为用于驱动eps系统的扫频振动的电机目标电流值,所述响应信号为与eps系统连接的方向传感器扭矩值。
3.根据权利要求2所述的一种eps系统快速转向振荡抑制方法,其特征在于,步骤s1中的所述监测信号的表达式为:
4.根据权利要求1所述的一种eps系统快速转向振荡抑制方法,其特征在于,步骤s2中的所述辨识系统模型的表达式为:
5.根据权利要求1所述的一种eps系统快速转向振荡抑制方法,其特征在于,步骤s3进一步包括:
6.根据权利要求1所述的一种eps系统快速转向振荡抑制方法,其特征在于,步骤s4中的所述第一传递函数的表达式为:
7.根据权利要求6所述的一种eps系统快速转向振荡抑制方法,其特征在于,步骤s4中,所述第二传递函数的获得步骤进一步包括:
8.根据权利要求7所述的一种eps系统快速转向振荡抑制方法,其特征在于,步骤s41中的所述频率特性包括低频截止频率、中频谐振频率及高频谐振频率。
9.根据权利要求8所述的一种eps系统快速转向振荡抑制方法,其特征在于,步骤s4中的所述第二传递函数的表达式为:
技术总结本发明提供一种EPS系统快速转向振荡抑制方法,具体包括:通过扫频振动驱动EPS系统,并采集获得EPS系统的监测信号;建立EPS系统扫频数据的辨识系统模型,将不同扫频振动频率下的多组监测信号输入辨识系统模型,获得辨识系统模型的系数估计值;通过监测信号对系数估计值进行误差修正,获得优化辨识系统模型;根据优化辨识系统模型的第一传递函数绘制获得EPS系统的伯德图,由伯德图分析获得用于对EPS系统进行振荡抑制的第二传递函数;将第二传递函数离散化,建立振荡抑制器进行振荡控制。本发明能够对快速转向产生的振荡进行分段抑制,获得更大的相位裕度,保证系统的响应速度。技术研发人员:沈敬祖,安海超,李志杰,王豪,齐仁昌受保护的技术使用者:天津德星智能科技有限公司技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/228310.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种超市推车助力装置
下一篇
返回列表