一种基于计算机控制的运输机器人底盘
- 国知局
- 2024-08-01 07:40:44
本技术涉及运输机器人,特别是一种基于计算机控制的运输机器人底盘。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器,机器人能够通过编程和自动控制来执行诸如作业或移动等任务,而机器人可用于医疗行业、军事行业、教育行业和生产生活当中,而生活当中的机器人最为常见,机器人可代替人们工作和运输,而运输机器人需要有个可移动的底盘,实现带动物品进行移动,但是现有的机器人底盘只能沿着直线进行移动,不会换向,导致不能将物品快速的运输到指定位置。
技术实现思路
1、本实用新型的目的是提供一种基于计算机控制的运输机器人底盘,其有益效果是该底盘可换向,实现将物品快速的运输到指定位置。
2、一种基于计算机控制的运输机器人底盘,包括底盘车板和固定连接在底盘车板上的两个轴承座,两个轴承座上均转动连接有支撑车轮,底盘车板上转动连接有转向座板,转向座板上转动连接有两个主转车轮。
3、进一步的,两个所述支撑车轮和两个所述主转车轮的外表面均固定连接有橡胶轮胎。
4、进一步的,所述转向座板上固定连接有承托空腔,承托空腔内固定连接有双头电机,双头电机的两个输出轴分别与两个主转车轮固定连接。
5、进一步的,所述转向座板上固定连接有换向齿轮i。
6、进一步的,所述底盘车板上固定连接有支托框板,支托框板上固定连接有减速电机,减速电机的输出轴上固定连接有换向齿轮ii,换向齿轮ii与换向齿轮i啮合传动连接。
7、进一步的,所述底盘车板上转动连接有多个防撞圆板。
8、进一步的,所述底盘车板上滑动连接有多个升降滑柱,多个升降滑柱上固定连接有横托存板。
9、进一步的,多个所述升降滑柱上均套设有弹簧,多个弹簧的上下两端分别与横托存板和底盘车板接触。
10、进一步的,多个所述升降滑柱的下端固定连接有限位横板,限位横板上固定连接有辅助支板。
11、进一步的,所述辅助支板上均转动连接有多个接触滚珠。
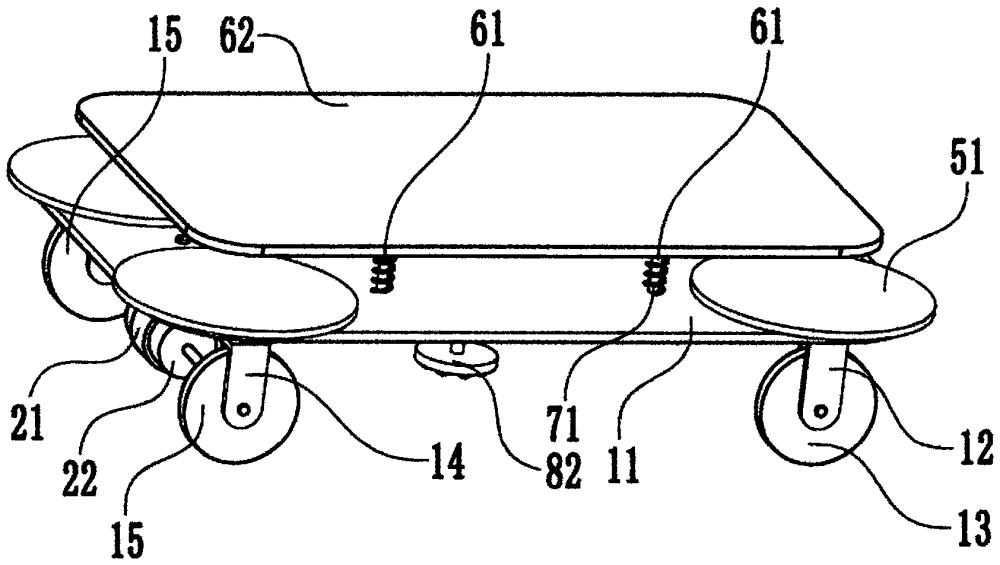
技术特征:1.一种基于计算机控制的运输机器人底盘,其特征在于:包括底盘车板(11)和固定连接在底盘车板(11)上的两个轴承座(12),两个轴承座(12)上均转动连接有支撑车轮(13),底盘车板(11)上转动连接有转向座板(14),转向座板(14)上转动连接有两个主转车轮(15)。
2.根据权利要求1所述的一种基于计算机控制的运输机器人底盘,其特征在于:两个所述支撑车轮(13)和两个所述主转车轮(15)的外表面均固定连接有橡胶轮胎。
3.根据权利要求1所述的一种基于计算机控制的运输机器人底盘,其特征在于:所述转向座板(14)上固定连接有承托空腔(21),承托空腔(21)内固定连接有双头电机(22),双头电机(22)的两个输出轴分别与两个主转车轮(15)固定连接。
4.根据权利要求1所述的一种基于计算机控制的运输机器人底盘,其特征在于:所述转向座板(14)上固定连接有换向齿轮i(31)。
5.根据权利要求4所述的一种基于计算机控制的运输机器人底盘,其特征在于:所述底盘车板(11)上固定连接有支托框板(41),支托框板(41)上固定连接有减速电机(42),减速电机(42)的输出轴上固定连接有换向齿轮ii(43),换向齿轮ii(43)与换向齿轮i(31)啮合传动连接。
6.根据权利要求1所述的一种基于计算机控制的运输机器人底盘,其特征在于:所述底盘车板(11)上转动连接有多个防撞圆板(51)。
7.根据权利要求1所述的一种基于计算机控制的运输机器人底盘,其特征在于:所述底盘车板(11)上滑动连接有多个升降滑柱(61),多个升降滑柱(61)上固定连接有横托存板(62)。
8.根据权利要求7所述的一种基于计算机控制的运输机器人底盘,其特征在于:多个所述升降滑柱(61)上均套设有弹簧(71),多个弹簧(71)的上下两端分别与横托存板(62)和底盘车板(11)接触。
9.根据权利要求7所述的一种基于计算机控制的运输机器人底盘,其特征在于:多个所述升降滑柱(61)的下端固定连接有限位横板(81),限位横板(81)上固定连接有辅助支板(82)。
10.根据权利要求9所述的一种基于计算机控制的运输机器人底盘,其特征在于:所述辅助支板(82)上均转动连接有多个接触滚珠(91)。
技术总结本技术涉及运输机器人技术领域,特别是一种基于计算机控制的运输机器人底盘,包括底盘车板和固定连接在底盘车板上的两个轴承座,两个轴承座上均转动连接有支撑车轮,底盘车板上转动连接有转向座板,转向座板上转动连接有两个主转车轮,两个所述支撑车轮和两个所述主转车轮的外表面均固定连接有橡胶轮胎,所述转向座板上固定连接有承托空腔,承托空腔内固定连接有双头电机,双头电机的两个输出轴分别与两个主转车轮固定连接,所述转向座板上固定连接有换向齿轮I,所述底盘车板上固定连接有支托框板,其有益效果是该底盘可换向,实现将物品快速的运输到指定位置。技术研发人员:张宪红,李美珊,李晓峰,运海红,孙煜彤受保护的技术使用者:黑龙江工程学院技术研发日:20230907技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240722/228488.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表