一种多轮转向系统后组车轮自动回正控制系统的制作方法
- 国知局
- 2024-08-01 07:50:27
本发明涉及汽车电器、自动控制、液压传动等多学科交叉的,具体为一种多轮转向系统后组车轮自动回正控制系统。
背景技术:
1、多轮转向系统通常应用于车身尺寸较大、且需要在狭窄道路和转弯空间受限条件下行驶的越野车辆上,但过高的车速会增加使用多轮转向系统、特别是后桥转向的风险系数,影响行车安全。因此有必要对其使用工况进行安全性考虑,特别是后组车轮何时需要回正,以及如何控制其回正进行研究。
2、多轮转向系统一般包括前组和多组两种工作模式。在前组模式下,只有前桥转向,后桥轮胎则始终处于回正的状态,回正功能是由对中缸电磁换向阀控制液压对中缸来实现的;在多组模式下,通过电液比例阀和助力缸电磁换向阀控制后桥液压助力缸实现后桥轮胎跟随前桥转向。但考虑到系统可靠性和行车安全性,需要对两种模式的使用工况进行合理区分,即后桥轮胎何时需要跟随,何时需要回正。这些情况包括:当车速低于限值v且在多组模式下时,后桥轮胎跟随前桥转向;当车速超过限值v时,为避免车辆在高速运动中后桥带有大角度出现甩尾、侧滑等不安全情况,系统会强制将工作模式从多组切换到前组,即后桥回正;当车速低于限值v且工作模式切换到前组时,后桥回正;还包括系统出现电控故障时,后桥回正,以满足系统基本的行车需求。至于如何控制后桥轮胎对中,需要从安全性、可靠性和行车舒适性等方面进行考虑,首先,系统不能直接通过液压对中缸对中,因为对中压力释放到对中缸里时会出现瞬时冲击,对转向系统造成一定影响,影响行车舒适性;其次,对中压力来自前桥,受方向盘控制,且受蓄能器影响,当压力不足或压力没有完全建立起来时,对中缸不能完全将后桥轮胎锁定在中位,在行车过程中遇到地面阻力时,会造成后桥轮胎跑偏,影响行车安全性。
3、正是基于上述考虑,本发明提出一种多轮转向系统后桥车轮对中控制方法,旨在解决后桥何时对中,以及如何控制对中,确保后桥能够平顺、稳定的回到中位,且完全锁止,避免出现跑偏现象。
技术实现思路
1、本发明为了解决背景技术中存在的问题,目的在于提供了一种多轮转向系统后组车轮自动回正控制系统,用以解决上述情况。
2、用于解决问题的方案
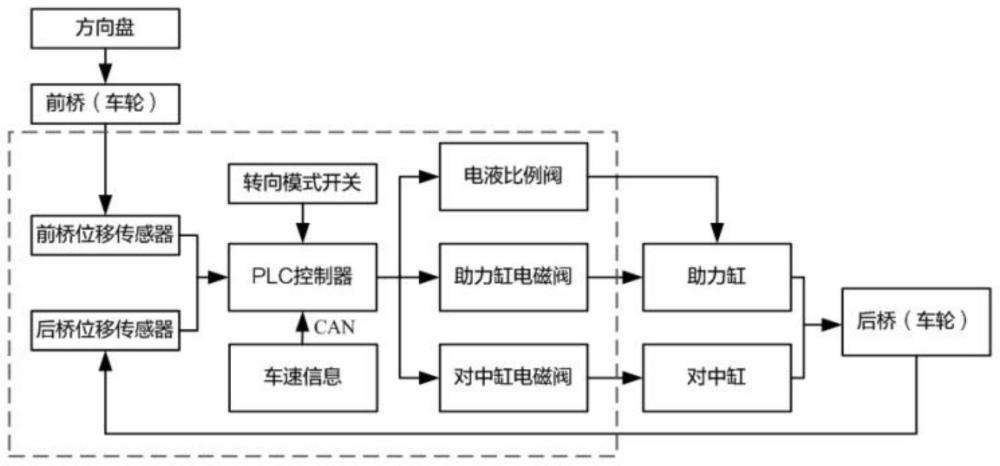
3、一种多轮转向系统后组车轮自动回正控制系统,包括:方向盘、前桥和后桥;所述系统还包括:
4、前桥位移传感器、后桥位移传感器、转向模式开关、控制器、电液比例阀、助力缸电磁阀、对中缸电磁阀、助力缸和对中缸;
5、所述前桥响应于方向盘,所述前桥位移传感器对前桥进行信息采集,所述后桥位移传感器对后桥进行信息采集,所述控制器用于对传感器采集的信息和实时输入的车速信息进行处理,所述控制器电气连接转向模式开关、电液比例阀、助力缸电磁阀和对中缸电磁阀;
6、所述助力缸响应于电液比例阀和助力缸电磁阀,所述对中缸响应于对中缸电磁阀,所述助力缸和对中缸控制所述后桥转向或回正。
7、进一步,所述系统包括:前组模式和多组模式;所述前组模式:后桥的最终状态是完全回正,只有前桥转向;所述多组模式:后桥跟随前桥转向。
8、进一步,所述控制器首先判断转向模式开关是否打开,若未打开,系统处于前组模式;若打开,控制器根据接收的车速信息判断是否超过第一阈值,若超过,系统处于前组模式;若未超过第一阈值,控制器切换至多组模式,在多组模式下,若超过第一阈值进入前组模式,之后若再次低于第一阈值,系统仍保持前组模式,该过程不可逆。
9、进一步,所述控制器切换至多组模式,控制器控制电液比例阀输出、助力缸电磁阀通电、对中缸电磁阀通电,间接控制助力缸工作、对中缸不工作,后桥跟随前桥转向。
10、进一步,系统处于前组模式下,控制器根据后桥位移传感器发送的信息继续判断后桥是否接近中位;若没有接近中位,控制器控制电液比例阀输出、助力缸电磁阀通电、对中缸电磁阀通电,间接控制助力缸工作、对中缸不工作,后桥跟随前桥回到中位。
11、进一步,若接近中位,控制器记录后桥接近中位时前桥助力缸位移传感器数据l0,在连续n次内,前桥助力缸位移传感器采集值l相对于l0的变化量是否大于预设阈值δ,若没有大于,控制器控制电液比例阀输出、助力缸电磁阀通电、对中缸电磁阀通电,间接控制助力缸工作、对中缸工作,后桥对中缸建立压力。
12、进一步,若大于,控制器开启延时t,然后判断延时时间是否结束,若没有结束,控制器控制电液比例阀输出、助力缸电磁阀通电、对中缸电磁阀通电,间接控制助力缸工作、对中缸工作,后桥对中缸建立压力。
13、进一步,若结束,控制器控制电液比例阀不输出、助力缸电磁阀断电、对中缸电磁阀断电,间接控制助力缸不工作、对中缸工作,后桥完成机械对中。
14、进一步,当控制器检测到前桥位移传感器、后桥位移传感器和电液比例阀中的其中之一出现故障时,控制器直接控制助力缸电磁阀和对中缸电磁阀断电,即可保证对中缸建压工作,助力缸卸载随动。
15、进一步,所述控制器采用plc转向控制器。
16、有益效果:
17、上述技术方案的有益效果在于:
18、第一,该后组车轮自动回正控制方法避免了车辆在高速工况下采用多轮转向时可能出现的偏斜、甩尾等不安全风险,提高了行车安全性。第二,在不改变现有液压系统的基础上,仅通过优化控制策略即可确保后组车轮完全回正,节约了成本。第三,该后桥车轮对中控制方法采用分步对中方法,分阶段控制对中缸和助力缸工作,最大程度的确保后桥车轮回正的快速性、平顺性和稳定性,有有效避免了液压系统的瞬时冲击。第四,该后桥车轮对中控制方法将前桥方向盘转动变化量作为后桥对中缸压力是否完全建立的依据,避免了后桥对中缸压力不足(管路内卸或蓄能器压力不足)导致无法完全对中的弊端。第五,考虑到液压系统的滞后性,该后桥车轮对中控制方法加入延时功能,确保对中缸压力完全建立并且稳定后再撤销助力缸的作用,提高了后组车轮自动回正的可靠性。第六,分析了三种后桥可能出现的回正工况,根据不同工况制定不同的自动回正控制方法。第七,对电控系统出现故障的情形进行了处理,避免了后组车轮转向系统完全失效时影响行车,保证了转向系统基本使用功能。
技术特征:1.一种多轮转向系统后组车轮自动回正控制系统,包括:方向盘、前桥和后桥;其特征在于,所述系统还包括:
2.根据权利要求1所述的一种多轮转向系统后组车轮自动回正控制系统,其特征在于,所述系统包括:前组模式和多组模式;所述前组模式:后桥的最终状态是完全回正,只有前桥转向;所述多组模式:后桥跟随前桥转向。
3.根据权利要求2所述的一种多轮转向系统后组车轮自动回正控制系统,其特征在于,所述控制器首先判断转向模式开关是否打开,若未打开,系统处于前组模式;若打开,控制器根据接收的车速信息判断是否超过第一阈值,若超过,系统处于前组模式;若未超过第一阈值,控制器切换至多组模式,在多组模式下,若超过第一阈值进入前组模式,之后若再次低于第一阈值,系统仍保持前组模式,该过程不可逆。
4.根据权利要求3所述的一种多轮转向系统后组车轮自动回正控制系统,其特征在于,所述控制器切换至多组模式,控制器控制电液比例阀输出、助力缸电磁阀通电、对中缸电磁阀通电,间接控制助力缸工作、对中缸不工作,后桥跟随前桥转向。
5.根据权利要求3所述的一种多轮转向系统后组车轮自动回正控制系统,其特征在于,系统处于前组模式下,控制器根据后桥位移传感器发送的信息继续判断后桥是否接近中位;若没有接近中位,控制器控制电液比例阀输出、助力缸电磁阀通电、对中缸电磁阀通电,间接控制助力缸工作、对中缸不工作,后桥跟随前桥回到中位。
6.根据权利要求5所述的一种多轮转向系统后组车轮自动回正控制系统,其特征在于,若接近中位,控制器记录后桥接近中位时前桥助力缸位移传感器数据l0,在连续n次内,前桥助力缸位移传感器采集值l相对于l0的变化量是否大于预设阈值δ,若没有大于,控制器控制电液比例阀输出、助力缸电磁阀通电、对中缸电磁阀通电,间接控制助力缸工作、对中缸工作,后桥对中缸建立压力。
7.根据权利要求6所述的一种多轮转向系统后组车轮自动回正控制系统,其特征在于,若大于,控制器开启延时t,然后判断延时时间是否结束,若没有结束,控制器控制电液比例阀输出、助力缸电磁阀通电、对中缸电磁阀通电,间接控制助力缸工作、对中缸工作,后桥对中缸建立压力。
8.根据权利要求7所述的一种多轮转向系统后组车轮自动回正控制系统,其特征在于,若结束,控制器控制电液比例阀不输出、助力缸电磁阀断电、对中缸电磁阀断电,间接控制助力缸不工作、对中缸工作,后桥完成机械对中。
9.根据权利要求8所述的一种多轮转向系统后组车轮自动回正控制系统,其特征在于,当控制器检测到前桥位移传感器、后桥位移传感器和电液比例阀中的其中之一出现故障时,控制器直接控制助力缸电磁阀和对中缸电磁阀断电,即可保证对中缸建压工作,助力缸卸载随动。
10.根据权利要求1所述的一种多轮转向系统后组车轮自动回正控制系统,其特征在于,所述控制器采用plc转向控制器。
技术总结本发明涉及一种多轮转向系统后组车轮自动回正控制系统,旨在解决在多组模式下车速超限时转向系统能够自动切换到前组模式,或在多组模式下关闭转向模式开关回到前组模式,后桥车轮都能能够平顺、稳定的回到中位,且完全锁止,避免出现跑偏现象。同时也对出现故障时后桥自动回正的情形进行了方法研究。技术研发人员:陈利东,张文博,谭俊良,聂文福,马全海,高锦,沈阿荣,殷东升,张霞霞受保护的技术使用者:陕西重型汽车有限公司技术研发日:技术公布日:2024/6/30本文地址:https://www.jishuxx.com/zhuanli/20240722/229118.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表