救援机器人
- 国知局
- 2024-08-01 07:53:16
本技术涉及救援机器人,具体涉及一种救援机器人。
背景技术:
1、农村存在大量老式水井和灌溉水井,一些工地和矿区也存在作业后没有及时回填的矿井和桩井,没有专门的救援设备使得救援人员救助困难、不及时、进展迟缓,从而造成被困人员的生命由于得不到及时有效的救治而产生严重的伤害,甚至死亡。
2、目前现有技术中,主要采取以下几种救援方法,第一是由救援人员进入至井中实施救援,但是这种方式只适用于井口直径较大的深井,对于救援人员来说这样的救援方式存在较大的危险性;第二是在井的一侧或周边利用工程机械和人力实施挖掘,打出一条通道,再横向打通井壁来实施救援,但是这样的方法需要大量的时间,并且容易引发坍塌。
3、因此,有必要提供一种救援机器人以解决上述技术问题。
技术实现思路
1、本实用新型的主要目的是提供一种救援机器人,旨在解决现有技术中井中救援困难且救援危险性高的技术问题。
2、本实用新型提供一种救援机器人,所述救援机器人包括:
3、本体,所述本体设置有牵引绳,所述牵引绳用于与外界提拉装置连接;
4、机械足组件,所述机械足组件转动设置于所述本体;
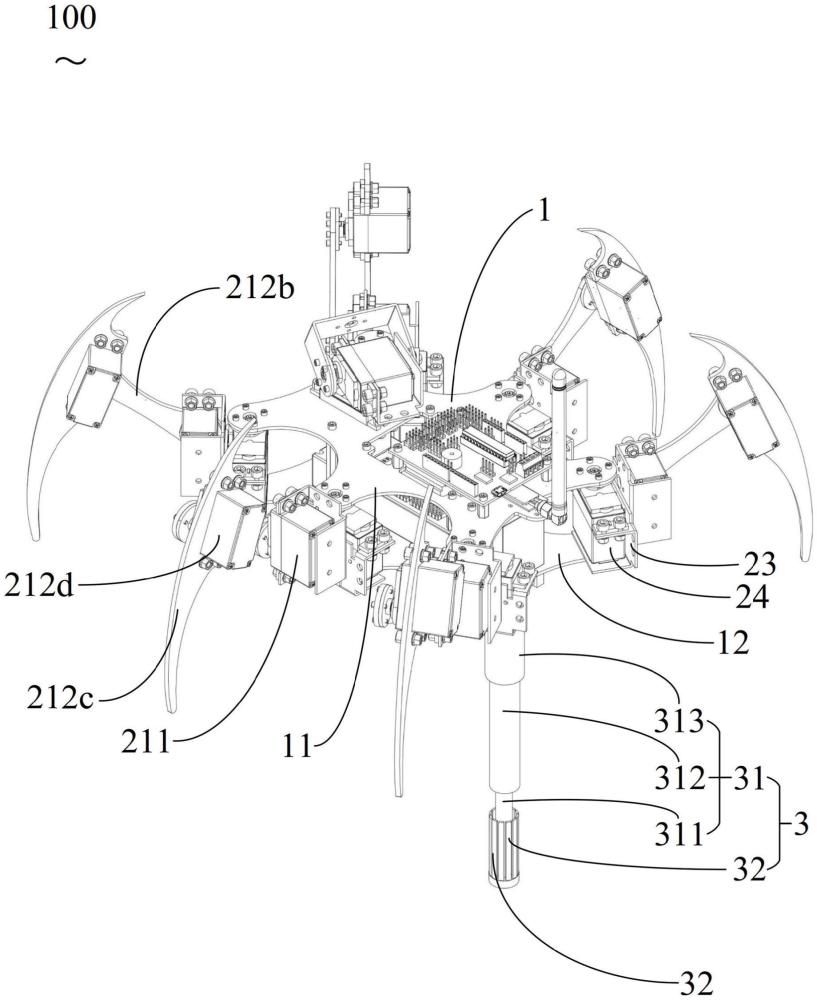
5、救援杆,所述救援杆包括伸缩杆和支撑杆,所述伸缩杆伸缩安装于所述本体,所述支撑杆转动安装于所述伸缩杆远离所述本体的一端,所述支撑杆能够朝向所述伸缩杆转动或远离所述伸缩杆转动。
6、在一实施例中,所述救援杆还包括电磁继电器,所述支撑杆为磁性金属杆,所述电磁继电器设置于所述伸缩杆远离所述本体的一端,所述电磁继电器连通或断开使所述伸缩杆获得或失去磁力,以使所述支撑杆朝向所述伸缩杆转动或远离所述伸缩杆转动。
7、在一实施例中,所述支撑杆的数量为多个,多个所述支撑杆均转动安装于所述伸缩杆远离所述本体的一端,且多个所述支撑杆均匀分布于所述伸缩杆的外周。
8、在一实施例中,所述伸缩杆包括依次伸缩连接的第一子伸缩杆、第二子伸缩杆和第三子伸缩杆,所述第三子伸缩杆远离所述第二子伸缩杆的一端与所述本体连接,所述支撑杆转动安装于所述第一子伸缩杆远离所述第二子伸缩杆的一端,所述支撑杆能够朝向所述第一子伸缩杆转动或远离所述第一子伸缩杆转动。
9、在一实施例中,所述机械足组件的数量至少为六个,其中三个所述机械足组件间隔设置于所述本体的一侧,其中另外三个所述机械足组件间隔设置于所述本体的另一侧。
10、在一实施例中,所述本体包括上盖板和下盖板,所述机械足组件包括机械足部件、转动轴、第一安装座和第一驱动部件,所述第一驱动部件安装于所述第一安装座,所述下盖板包括第一转动孔,所述第一安装座包括第二转动孔,所述转动轴的两端分别转动安装于所述第一转动孔和所述第二转动孔,所述第一驱动部件的输出轴安装于所述上盖板,所述机械足部件安装于所述第一安装座。
11、在一实施例中,所述机械足部件包括第二驱动部件和机械足,所述第二驱动部件安装于所述第一安装座,所述机械足形成有第三转动孔,所述第二驱动部件的输出轴安装于所述第三转动孔。
12、在一实施例中,所述机械足包括连接段、接触段和第三驱动部件,所述第三转动孔设置于所述连接段的一端,所述连接段的另一端形成有第四转动孔,所述第三驱动部件安装于所述接触段,所述第三驱动部件的输出端安装于所述第四转动孔。
13、在一实施例中,所述连接段的两端均形成有尖刃。
14、在一实施例中,所述救援机器人还包括摄像头,所述摄像头设置于所述本体。
15、上述方案中,救援机器人包括本体、机械足组件和救援杆;本体设置有牵引绳,牵引绳用于与外界提拉装置连接;机械足组件转动设置于本体;救援杆包括伸缩杆和支撑杆,伸缩杆伸缩安装于本体,支撑杆转动安装于伸缩杆远离本体的一端,支撑杆能够朝向伸缩杆转动或远离伸缩杆转动。具体地,当需要救援时,启动救援机器人,救援机器人从井口进入,本体驱动机械足组件沿井壁行走,当救援机器人行走至一定的深度时,伸缩杆伸出,并且驱动支撑杆远离伸缩杆转动,这时被困人员能够站立在支撑杆上,并且手抓紧救援杆,井口外的救援人员驱动提拉装置,这样就能够通过牵引绳将救援机器人往井口外拉,同时被困人员也能够跟随移动,直至靠近进口,救援人员就能够将被困人员拉出井口,完成救援。这样就无需救援人员进入井内也能完成救援,降低救援人员的作业危险性,同时操作简单快捷,能够在短时间内完成救援,提高被困人员的生存率。
技术特征:1.一种救援机器人,其特征在于,包括:
2.根据权利要求1所述的救援机器人,其特征在于,所述救援杆还包括电磁继电器,所述支撑杆为磁性金属杆,所述电磁继电器设置于所述伸缩杆远离所述本体的一端,所述电磁继电器连通或断开使所述伸缩杆获得或失去磁力,以使所述支撑杆朝向所述伸缩杆转动或远离所述伸缩杆转动。
3.根据权利要求1所述的救援机器人,其特征在于,所述支撑杆的数量为多个,多个所述支撑杆均转动安装于所述伸缩杆远离所述本体的一端,且多个所述支撑杆均匀分布于所述伸缩杆的外周。
4.根据权利要求1至3中任一项所述的救援机器人,其特征在于,所述伸缩杆包括依次伸缩连接的第一子伸缩杆、第二子伸缩杆和第三子伸缩杆,所述第三子伸缩杆远离所述第二子伸缩杆的一端与所述本体连接,所述支撑杆转动安装于所述第一子伸缩杆远离所述第二子伸缩杆的一端,所述支撑杆能够朝向所述第一子伸缩杆转动或远离所述第一子伸缩杆转动。
5.根据权利要求1至3中任一项所述的救援机器人,其特征在于,所述机械足组件的数量至少为六个,其中三个所述机械足组件间隔设置于所述本体的一侧,其中另外三个所述机械足组件间隔设置于所述本体的另一侧。
6.根据权利要求5所述的救援机器人,其特征在于,所述本体包括上盖板和下盖板,所述机械足组件包括机械足部件、转动轴、第一安装座和第一驱动部件,所述第一驱动部件安装于所述第一安装座,所述下盖板包括第一转动孔,所述第一安装座包括第二转动孔,所述转动轴的两端分别转动安装于所述第一转动孔和所述第二转动孔,所述第一驱动部件的输出轴安装于所述上盖板,所述机械足部件安装于所述第一安装座。
7.根据权利要求6所述的救援机器人,其特征在于,所述机械足部件包括第二驱动部件和机械足,所述第二驱动部件安装于所述第一安装座,所述机械足形成有第三转动孔,所述第二驱动部件的输出轴安装于所述第三转动孔。
8.根据权利要求7所述的救援机器人,其特征在于,所述机械足包括连接段、接触段和第三驱动部件,所述第三转动孔设置于所述连接段的一端,所述连接段的另一端形成有第四转动孔,所述第三驱动部件安装于所述接触段,所述第三驱动部件的输出端安装于所述第四转动孔。
9.根据权利要求8所述的救援机器人,其特征在于,所述连接段的两端均形成有尖刃。
10.根据权利要求1所述的救援机器人,其特征在于,所述救援机器人还包括摄像头,所述摄像头设置于所述本体。
技术总结本技术提供一种救援机器人,包括本体、机械足组件和救援杆,本体设置有牵引绳,牵引绳用于与外界提拉装置连接;机械足组件转动设置于本体;救援杆包括伸缩杆和支撑杆,伸缩杆伸缩安装于本体,支撑杆转动安装于伸缩杆远离本体的一端,支撑杆能够朝向伸缩杆转动或远离伸缩杆转动。当救援机器人行走至一定的深度时,伸缩杆伸出,并且驱动支撑杆远离伸缩杆转动,这时被困人员能够站立在支撑杆上,并且手抓紧救援杆,井口外的救援人员驱动提拉装置,这样就能够通过牵引绳将救援机器人往井口外拉,同时被困人员也能够跟随移动至井口。这样就能够降低救援人员的作业危险性,能够在短时间内完成救援,提高被困人员的生存率。技术研发人员:程清思,吕银晓,代辉,辛红敏受保护的技术使用者:湖北文理学院技术研发日:20231208技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240722/229353.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表