一种基于新型双Bennett机构的多轨迹滚动机器人
- 国知局
- 2024-08-01 07:54:47
本发明涉及一种基于新型双bennett机构的多轨迹滚动机器人,具体以bennett四杆机构为基础,将两个bennett四杆机构首尾闭环连接,通过驱动电机的单一转速实现机器人的直行滚动模式;通过瞬时改变电机转速及转角的控制方法,实现机器人的转向滚动模式。在直行滚动模式下,改变初始位形时的电机转速,可使机器人以单边滚动步态及多边滚动步态实现直行移动,在转向滚动模式下,改变机器人滚动过程中电机的转角和转速,可使机器人以不同轨迹实现转向运动。
背景技术:
1、滚动机器人在不同地形和表面上的滚动运动需要保持平稳,以防止机器人失去平衡。这需要解决机构设计、运动规划和驱动控制等问题,以确保机器人在各种情况下都能保持稳定并具有良好的运动性能。bennett机构作为典型的单闭链空间四杆机构,在机器人研究领域具有非常广泛的应用。通过改变杆件的形状,可将多个bennett机构进行拼接,形成新型单自由度机构,基于此类机构设计一种移动机器人,以拥有单自由度、高稳定、多步态运动的性能。
2、基于上述内容,本发明提出一种将2个bennett结合起来的新型设计方法,基于按照此方法设计的机构发明一种平稳多轨迹的滚动机器人。
技术实现思路
1、本发明要解决的技术问题:将两个bennett机构首尾闭环连接,形成新型8杆10副单自由度机构;基于新型双bennett机构设计多轨迹滚动机器人,仅通过一台电机,实现机器人直行滚动及转向滚动的功能;
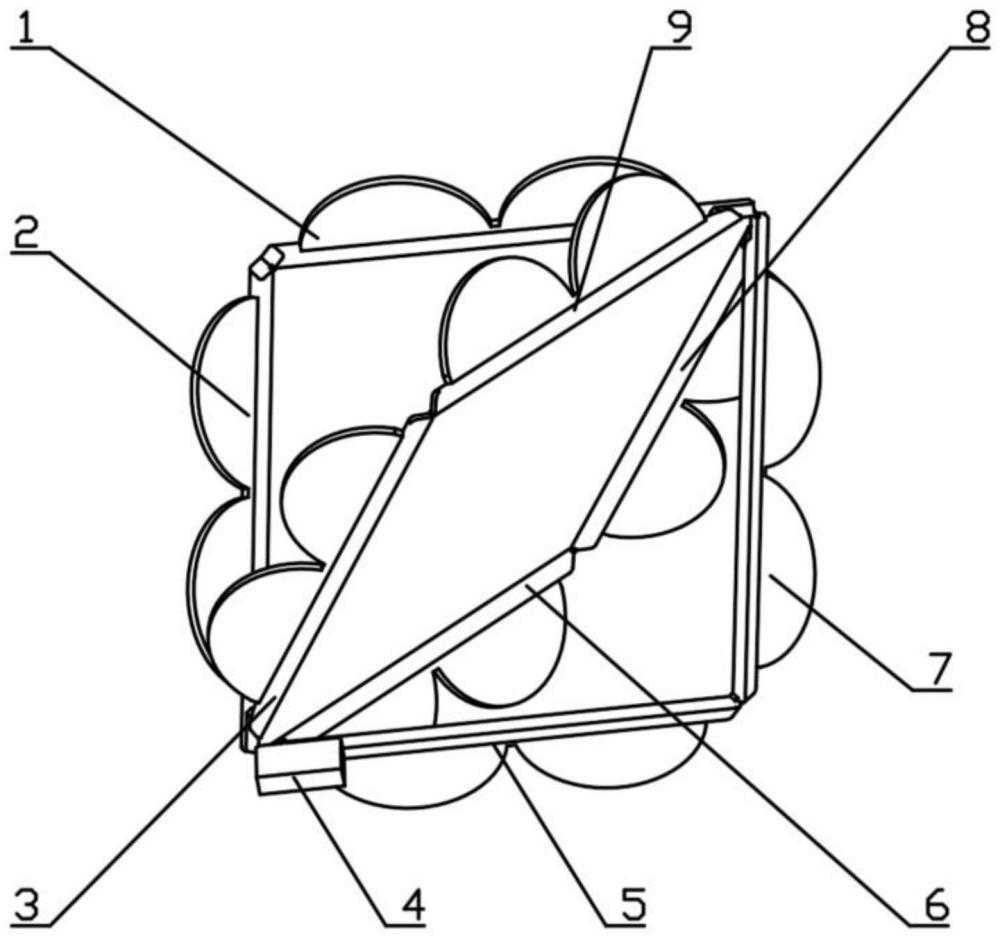
2、基于新型双bennett机构的多轨迹滚动机器人包括:第一杆件(1)、第一驱动杆(2)、第一连杆(3)、驱动电机(4)、第一支撑杆(5)、第二支撑杆(6)、第二连杆(7)、第三连杆(8)、第二杆件(9);
3、所述的bennett-a机构第一驱动杆(2)的主体截面为圆角矩形,右侧加工出一段延长部分用以连接bennett-b机构,其右侧转动关节(2-3)与驱动电机(4)相连,左侧转动关节(2-1)与第一杆件(1)构成铰链,靠近右侧的转动关节(2-2)与第一连杆(3)连接,装配凸起球面(2-2),用以支撑机构;
4、所述的bennett-a第一连杆(3)为bennett-a第一驱动杆(2)加工延长部分前的镜像;
5、所述的bennett-a第一杆件(1)为bennett-a第一驱动杆(2)的镜像;
6、所述的bennett-a第二杆件(9)为bennett-a第一驱动杆(2)加工延长部分前的结构和外形尺寸相同;
7、所述的驱动电机(4)为直流电机,安装在bennett-b第一支撑杆(5)上,驱动电机的主轴与bennett-a第一驱动杆(2)相连接;
8、所述的bennett-b第一支撑杆(5)的主体截面为圆角矩形,两侧加工出的倾斜台面截面形状均为圆角矩形,驱动电机(4)安装在转动关节(5-4)处,其余结构及外形尺寸与bennett-a第一驱动杆(2)相同;
9、所述的bennett-b第二支撑杆(6)和bennett-a第一连杆(3)结构和外形尺寸相同;
10、所述的bennett-b第二连杆(7)为bennett-b第一支撑杆(5)的镜像;
11、所述的bennett-b第三连杆(8)为bennett-b第二支撑杆(6)的镜像;
12、构成机构的零件连接方式:
13、第一驱动杆(2)与驱动电机(4)的电机轴通过套筒连接,驱动电机外壳固定在第一支撑杆(5)的转动关节(5-4)上,第一杆件(1)的转动关节(1-3)与第一驱动杆(2)的转动关节(2-1)、第一连杆(3)的转动关节(3-1)与第一驱动杆(2)的转动关节(2-3)、第一连杆(3)的转动关节(3-3)与第二杆件(9)的转动关节(9-1)、第二杆件(9)的转动关节(9-3)与第一杆件(1)的转动关节(1-2)均通过转动副连接,组成bennett-a机构;
14、第一支撑杆(5)与第二连杆(7)、第二连杆(7)与第三连杆(8)、第三连杆(8)与第二支撑杆(6)、第二支撑杆(6)与第一支撑杆(5)按照bennett-a机构的连接方式,通过转动副连接组成bennett-b机构;
15、第一杆件(1)的转动关节(1-1)与第二连杆(7)、第一驱动杆(2)的转动关节(2-4)与第一支撑杆(5)的转动关节(5-4)通过转动副链接实现bennett-a机构与bennett-b机构的闭环连接。
16、第一驱动杆(2)在驱动电机作用下作往复运动,第一杆件(1)与第一驱动杆(2)、第一驱动杆(2)与第一连杆(3)、第一连杆(3)与第二杆件(9)、第二杆件(9)与第一杆件(1)、第一支撑杆(5)与第二连杆(7)、第二连杆(7)与第三连杆(8)、第三连杆(8)与第二支撑杆(6)、第二支撑杆(6)与第一支撑杆(5)、第一杆件(1)与第二连杆(7)、第一驱动杆(2)与第一支撑杆(5)的连接关节均做空间往复运动,而第一支撑杆(5)、第二支撑杆(6)起初始支撑作用。
17、所述的凸起球面长度均小于杆件长度,与地面形成点接触以支撑机构,从而产生空间差。
18、本发明的有益成果:本发明所述的基于双bennett机构的8杆10副机构为单自由度机构,通过杆件异形化设计可实现机器人连续稳定滚动;通过利用驱动电机正反转实现机构单轨迹前进及后退的直行滚动模式;通过瞬时改变电机转速及电机转角可实现机构转向滚动模式,机构拥有步态灵活及滚动稳定的特性,适用于非结构化地形的勘测。同时,该机构结构简易,便于加工及制造,可应用于教育领域,让学生更进一步了解空间连杆机构的魅力。
技术特征:1.一种基于新型双bennett机构的多轨迹滚动机器人,其特征在于:该机构为两个完全相同的bennett四杆机构首尾闭环连接的8杆10副单自由度机构,其中包括:第一杆件(1)、第一驱动杆(2)、第一连杆(3)、驱动电机(4)、第一支撑杆(5)、第二支撑杆(6)、第二连杆(7)、第三连杆(8)、第二杆件(9);
2.如权利要求1所述的一种基于新型双bennett机构的多轨迹滚动机器人,其特征在于:第一驱动杆(2)在驱动电机作用下作往复运动,第一杆件(1)与第一驱动杆(2)、第一驱动杆(2)与第一连杆(3)、第一连杆(3)与第二杆件(9)、第二杆件(9)与第一杆件(1)、第一支撑杆(5)与第二连杆(7)、第二连杆(7)与第三连杆(8)、第三连杆(8)与第二支撑杆(6)、第二支撑杆(6)与第一支撑杆(5)、第一杆件(1)与第二连杆(7)、第一驱动杆(2)与第一支撑杆(5)的连接关节均做空间往复运动,而第一支撑杆(5)、第二支撑杆(6)起初始支撑作用。
3.如权利要求1所述的一种基于新型双bennett机构的多轨迹滚动机器人,其特征在于:第一杆件(1)与第一驱动杆(2)连接处、第一杆件(1)与第二连杆(7)连接处、第一支撑杆(5)与第二连杆(7)连接处、第一驱动杆(2)与第一支撑杆(5)连接处的转动副轴线均相互平行且按照平行四边形形状布置;所述的凸起球面长度均小于杆件长度,与地面形成点接触以支撑机构,从而产生空间差。
4.如权利要求1所述的一种基于新型双bennett机构的多轨迹滚动机器人,其特征在于:基于新型双bennett机构,机器人拥有单自由度的机构特性;通过保持两bennett机构的姿态时刻相同,机器人翻滚后及时复位以实现机器人的滚动运动的高稳定性;通过改变电机控制方式实现机器人多轨迹滚动,在直行滚动模式下,改变电机初始转速可实现机器人单边滚动步态与多边滚动步态,在转向滚动模式下,改变电机转角可实现机器人前滚后的运动方向,通过改变电机转速,依靠凸起球面与地面的摩擦力改变机器人的前滚运动方向,从而实现机器人转向运动模式。
技术总结本发明涉及机器人领域,具体为一种基于新型双Bennett机构的多轨迹滚动机器人,将两个Bennett四杆机构首尾闭环连接形成新型双Bennett机构,由第一杆件(1)、第一驱动杆(2)、第一连杆(3)、驱动电机(4)、第一支撑杆(5)、第二支撑杆(6)、第二连杆(7)、第三连杆(8)、第二杆件(9)组成。通过控制驱动电机的转速及转角实现机器人的直行滚动模式及转向滚动模式。在直行滚动模式下,控制初始位形时的电机转速,可实现机器人的单边滚动步态及多边滚动步态;在转向滚动模式下,改变机器人滚动过程中电机转角和转速,可实现不同轨迹的转向运动。机器人拥有单自由度、高稳定、多步态运动的特性,适用于未知地形勘测。同时,结构简易,便于加工制造,可应用于教育领域。技术研发人员:刘超,董岳海,胡潇舟受保护的技术使用者:北京交通大学技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240722/229443.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。