一种基于轮速差的车辆跑偏补偿控制方法和系统与流程
- 国知局
- 2024-08-01 08:03:12
本发明涉及车辆控制,具体涉及一种基于轮速差的车辆跑偏补偿控制方法和系统
背景技术:
1、当车辆发生由于自身原因(如悬架位置偏差,四轮定位偏差等)导致跑偏或由于自然因素(如侧风、倾斜路面等)发生跑偏时,驾驶员需要施加相对较大的手力才能保持直行。这时,便需要电动助力转向系统提供相应的补偿扭矩以减轻手力,消除驾驶员的疲劳。
2、目前多数汽车跑偏补偿功能(pdc)控制策略需要根据汽车横摆角速度信号和侧向加速度信号判断车辆是否满足跑偏补偿功能激活要求,并根据当前的行驶工况生成跑偏补偿电流,与基本电流叠加,形成最终的助力电流,然后驱动电机实现对基础的专项系统的齿条力的补偿。但该技术方案存在只有轮转器的轻卡等商用级车辆上的适用困难,实际将存在车辆总线上无对应信号,且增加与横摆角速度信号、侧向加速度信号相关的传感器或控制器会导致整车成本增加等问题。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种基于轮速差的车辆跑偏补偿控制方法,包括:
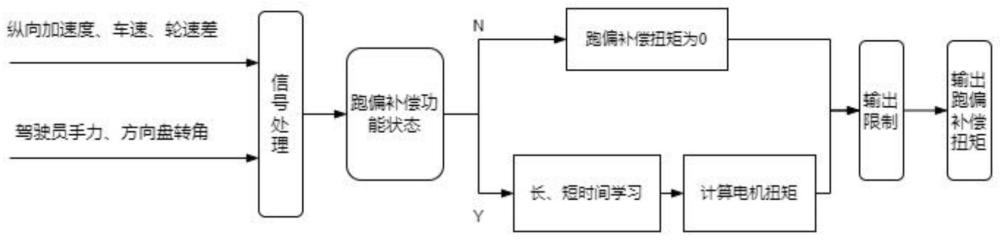
2、s1、获取车辆监控信息,并根据第一判断规则判断监控信息是否满足预设条件;
3、监控信息包括:轮速差、车速、纵向加速度、方向盘角度、手力力矩;
4、第一判断规则包括:车速为预设车速范围;轮速差位于预设轮速差范围内;纵向加速度位于预设纵向加速度范围内;方向盘角度位于预设方向盘角度范围;手力力矩的绝对值小于或等于预设手力力矩;
5、s2、若监控信息满足预设s1条件,则进入跑偏补偿学习状态,包括根据长时间迭代算法计算长时间学习力矩和根据短时间迭代算法计算短时间学习力矩;
6、s3、将长时间学习力矩和短时间学习力矩叠加计算,执行与电机原始输出扭矩的叠加求和并输出电机补偿扭矩。
7、进一步的,第一判断规则还包括:获取车辆行驶车速,并判断车速是否为预设车速范围内行驶;若车辆为预设车速内的行驶状态,则判断车辆的轮速差是否为预设轮速差范围以内;若车辆为预设轮速差内的行驶状态,则判断车辆的纵向加速度是否为预设纵向加速度以内;若车辆为预设纵向加速度范围内的行驶状态,则判断车辆方向盘的角度是否为预设方向盘角度范围内;若车辆为预设方向盘角度内的行驶状态,则判断作用在方向盘上的驾驶员手力矩值是否为预设手力矩值以下。
8、进一步的,第一判断规则还包括:
9、预设车速的参数值范围为:30kph≤v≤100kph
10、预设纵向加速度的参数范围为:-1m/s2≤a≤1m/s2
11、预设方向盘转角的范围为:-5°≤θ≤5°
12、预设驾驶员手力矩值范围为:0.1nm≤t≤2nm
13、预设轮速差范围|δv|≤0.5kph;
14、进一步的,本发明还提供一种基于轮速差的车辆跑偏补偿控制系统,执行前述的基于轮速差的车辆跑偏补偿控制方法。
15、本发明使用车轮轮速差、方向盘转角信号、驾驶员手力矩等信号以及电动助力转向系统的转向助力等监控信息,综合判断车辆是否满足跑偏补偿功能激活要求,并据此判断跑偏补偿功能工作效果。通过获取轮速信号并计算比较轮速差和设定阈值的大小,作为进入跑偏补偿状态的条件之一,进而避免增加安装横摆角速度、侧向加速度信号相关的传感器,降低了整车配置成本。
技术特征:1.一种基于轮速差的车辆跑偏补偿控制方法,其特征在于:
2.根据权利要求1所述的基于轮速差的车辆跑偏补偿控制方法,其特征在于:所述第一判断规则还包括:获取车辆行驶车速,并判断所述车速是否为预设车速范围内行驶;若所述车辆为预设车速内的行驶状态,则判断车辆的轮速差是否为预设轮速差范围以内;若所述车辆为预设轮速差内的行驶状态,则判断车辆的纵向加速度是否为预设纵向加速度以内;若所述车辆为预设纵向加速度范围内的行驶状态,则判断车辆方向盘的角度是否为预设方向盘角度范围内;若所述车辆为预设方向盘角度内的行驶状态,则判断作用在方向盘上的驾驶员手力矩值是否为预设手力矩值以下。
3.根据权利要求1所述的基于轮速差的车辆跑偏补偿控制方法,其特征在于:所述第一判断规则还包括:
4.一种基于轮速差的车辆跑偏补偿控制系统,其特征在于,执行如权利要求1-4任一项所述的基于轮速差的车辆跑偏补偿控制方法。
技术总结本发明提供了一种基于轮速差的车辆跑偏补偿控制方法及系统,车辆跑偏控制方法包括获取包括轮速差、车速、纵向加速度、方向盘角度、手力力矩在内的车辆监控信息,判断车辆监控信息是否位于预设范围值;若满足预设值则进入补偿学习状态,并根据长时间迭代算法和短时间迭代算法计算学习力矩,若计算学习力矩满足预设范围值,则将其叠加并与电力原始输出扭矩求和后输出电机补偿扭矩。采用基于轮速差的力矩补偿方法可以在不进行额外配置的情况下适用于轻卡等商用级车辆,并且可以降低驾驶疲劳感,达到安全纠正跑偏的效果。技术研发人员:余金霞,邬杰,杜满胜,刘小云,彭长青受保护的技术使用者:江铃汽车股份有限公司技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240722/230160.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表